Autonomiczny Agent Gry
W póžnych latach 80. pamiętam film dokumentalny BBC Ho najnowoczeķniejszej grafice komputerowej i animacji. Program zawieraģ wiele ekscytujących rzeczy, ale najbardziej ŋywo pamiętam niesamowitą demonstrację stada ptaków. Opieraģ się na bardzo prostych zasadach, ale wyglądaģ tak spontanicznie i naturalnie, a oglądanie go hipnotyzowaģo. Programista, który zaprojektowaģ zachowanie, nazywa się Craig Reynolds. Nazywaģ stado ptaków "boidami", a proste zasady, z których wyģoniģy się stada, nazwaģ "zachowaniami sterowania". Od tego czasu Reynolds opublikowaģ wiele artykuģów na temat róŋnych rodzajów zachowaņ sterowania, z których wszystkie są fascynujące. Większoķæ, jeķli nie wszystkie, jego zachowaņsterowaniah ma bezpoķrednie znaczenie dla gier, dlatego spędzę duŋo czasu, opisując je i pokazując, jak je kodowaæ i jak z nich korzystaæ.
Co to jest agent autonomiczny?
Widziaģem wiele definicji tego, czym jest autonomiczny agent, ale prawdopodobnie najlepsza jest taka:
Autonomiczny agent to system znajdujący się w jego wnętrzu i będący częķcią ķrodowiska, który wyczuwa to ķrodowisko i z czasem na niego dziaģa, dąŋąc do realizacji wģasnych celów i aby wpģywaæ na to, co wyczuwa w przyszģoķci.
W tej częķci będziemy uŋywaæ terminu "agent autonomiczny" w odniesieniu do agentów, którzy posiadają pewien stopieņ autonomicznego ruchu. Jeķli autonomiczny agent natknie się na nieoczekiwaną sytuację, na przykģad znajdując na swojej drodze ķcianę, będzie mógģ odpowiednio zareagowaæ i odpowiednio dostosowaæ swój ruch. Na przykģad moŋesz zaprojektowaæ jednego autonomicznego agenta, który będzie zachowywaģ się jak królik, a drugi jak lis. Jeķli podczas chrupania szczęķliwie na ķwieŋej, zroszonej trawie królik zdoģa dostrzec lisa, będzie on sam próbowaģ go ominąæ. W tym samym czasie lis będzie autonomicznie ķcigaģ królika. Oba te zdarzenia występują bez dalszej interwencji programisty; po uruchomieniu autonomiczni agenci po prostu dbają o siebie. Nie oznacza to, ŋe autonomiczny agent powinien byæ w stanie poradziæ sobie z absolutnie kaŋdą sytuacją (choæ moŋe to byæ jeden z twoich celów), ale często bardzo przydatne jest nadanie mu pewnej autonomii. Na przykģad częstym problemem podczas pisania kodu wyszukiwania ķcieŋek jest sposób radzenia sobie z przeszkodami dynamicznymi. Dynamiczne przeszkody to obiekty w twoim ķwiecie gry, które poruszają się lub zmieniają pozycję, takie jak inni agenci, przesuwane drzwi i tak dalej. Biorąc pod uwagę odpowiednie ķrodowisko, wģączenie prawidģowego zachowania sterującego do postaci w grze uniemoŋliwi pisanie specjalnego kodu identyfikującego ķcieŋkę do obsģugi dynamicznych przeszkód - autonomiczny agent będzie w stanie poradziæ sobie z nimi, jeķli i kiedy będzie musiaģ. Ruch autonomicznego agenta moŋna podzieliæ na trzy warstwy:
• Wybór akcji: jest to częķæ zachowania agenta odpowiedzialna za wybór jego celów i decydowanie o tym, jaki plan zastosowaæ. To jest częķæ która mówi "idž tutaj" i "wykonaj A, B, a następnie C."
• Sterowanie: ta warstwa odpowiada za obliczanie poŋądanych trajektorii wymaganych do speģnienia celów i planów okreķlonych przez warstwę wyboru akcji. Zachowania sterujące są implementacją tej warstwy. Wytwarzają siģę sterującą, która opisuje, gdzie agent powinien się poruszaæ i jak szybko powinien podróŋowaæ, aby się tam dostaæ.
• Lokomocja: dolna warstwa, lokomocja, reprezentuje bardziej mechaniczne aspekty ruchu agenta. To sposób podróŋowania od A do B. Na przykģad, jeķli zastosowaģeķ mechanikę wielbģąda, akwarium i zģotej rybki, a następnie wydaģeķ im polecenie podróŋy na póģnoc, wszyscy uŋyliby róŋnych procesów mechanicznych do wywoģania ruchu, nawet jeķli ich zamiar ( na póģnoc) jest identyczny. Oddzielając tę warstwę od warstwy sterującej, moŋna z niewielkimi modyfikacjami wykorzystaæ te same zachowania kierowania dla zupeģnie róŋnych rodzajów poruszania się.
Reynolds wykorzystuje doskonaģą analogię do opisania ról kaŋdej z tych warstw w swoim artykule "Zachowania sterujące dla postaci autonomicznych".
"Wežmy na przykģad niektórych kowbojów hodujących stado bydģa Zakres. Krowa odchodzi od stada. Szef szlaku kaŋe kowbojowi zabraæ zabģąkanego. Kowboj mówi "wio" swojemu koniowi i prowadzi go do krowy, unikając przeszkód po drodze. W tym przykģadzie szef szlaku reprezentuje wybór akcji: zauwaŋenie, ŋe zmieniģ się stan ķwiata (krowa opuķciģa stado) i wyznaczenie celu (odzyskanie zbģąkanej). Poziom kierowania jest reprezentowany przez kowboja, który rozkģada cel na serię prostych celów cząstkowych (zbliŋ się do krowy, unikaj przeszkód, odzyskaj krowę). Cel cząstkowy odpowiada zachowaniu kierowniczemu druŋyny kowbojów i koni. Uŋywając róŋnych sygnaģów sterujących (komendy gģosowe, ostrogi, wodze) kowboj kieruje konia w kierunku celu. Ogólnie rzecz biorąc, sygnaģy te wyraŋają pojęcia takie jak: idž szybciej, idž wolniej, skręæ w prawo, skręæ w lewo i tak dalej. Koņ realizuje poziom poruszania się. Biorąc za sygnaģy wejķciowe kowboja, koņ porusza się we wskazanym kierunku. Ten ruch jest wynikiem zģoŋonej interakcji percepcji wzrokowej konia, jego poczucia równowagi i jego mięķni przykģadających momenty do stawów szkieletu. Z technicznego punktu widzenia poruszanie się nogami jest bardzo trudnym problemem, ale ani kowboj, ani koņ nie zastanawiają się nad tym. "
Jednak nie wszystko jest sģodkie w ķwiecie niezaleŋnych agentów. Wdroŋenie zachowaņ sterowniczych moŋe obciąŋyæ programistę mnóstwem nowych problemów do rozwiązania. Niektóre zachowania mogą wymagaæ intensywnego ręcznego dostosowywania, podczas gdy inne muszą byæ starannie zakodowane, aby uniknąæ uŋycia duŋej częķci czasu procesora. Ģącząc zachowania, zwykle naleŋy zachowaæ ostroŋnoķæ, aby uniknąæ moŋliwoķci, ŋe dwie lub więcej z nich moŋe się anulowaæ. Istnieją jednak sposoby i sposoby na obejķcie większoķci tych problemów (no cóŋ, z wyjątkiem drobnych poprawek - ale i tak jest fajnie), a najczęķciej korzyķci z zachowaņ kierowniczych znacznie przewyŋszają wszelkie wady.
Model pojazdu
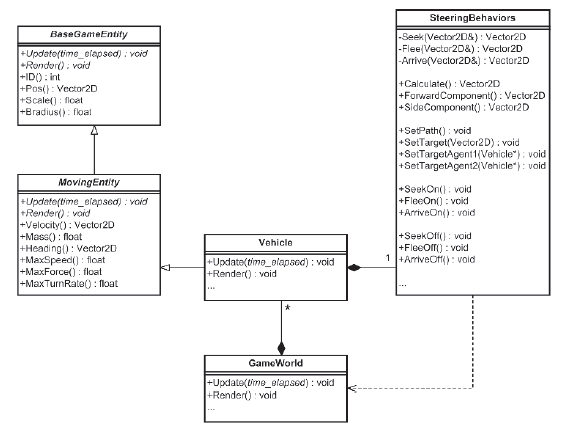
Zanim omówię poszczególne zachowania związane z kierowaniem, poķwięcę trochę czasu na wyjaķnienie kodu i projektu klasy modelu pojazdu (lokomocji). MovingEntity to klasa podstawowa, z której wywodzą się wszyscy agenci gier w ruchu. Zawiera dane opisujące podstawowy pojazd o masie punktowej. Pozwól, ŋe przeprowadzę cię przez deklarację klasy:
class MovingEntity : public BaseGameEntity
{
protected:
Klasa MovingEntity wywodzi się z klasy BaseGameEntity, która definiuje encję o identyfikatorze, typie, pozycji, promieniu granicznym i skali. Wszystkie elementy gry odtąd w tej ksiąŋce będą pochodziæ z BaseGameEntity. BaseGameEntity ma równieŋ dodatkową zmienną boolowską, m_bTag, która będzie wykorzystywana na róŋne sposoby, z których niektóre zostaną opisane wkrótce. Nie wymienię tutaj deklaracji klasy, ale polecam rzuciæ okiem na nagģówek BaseGameEntity.h podczas czytania tej częķci.
SVector2D m_vVelocity;
// znormalizowany wektor wskazujący kierunek, w którym zmierza jednostka.
SVector2D m_vHeading;
// wektor prostopadģy do wektora kierunku
SVector2D m_vSide;
Wektory nagģówka i boczne definiują lokalny ukģad wspóģrzędnych dla poruszającego się obiektu. W przykģadach podanych w tej sekcji kurs pojazdu zawsze będzie wyrównany z jego prędkoķcią (na przykģad pociąg ma kurs z wyrównaną prędkoķcią). Wartoķci te będą często uŋywane przez algorytmy sterowania i są aktualizowane co kaŋdą klatkę.
double m_dMass;
//maksymalna prędkoķæ, z jaką ta jednostka moŋe podróŋowaæ.
double m_dMaxSpeed;
//maksymalna siģa, jaką ta istota moŋe wytworzyæ, aby sama się zasiliæ
//(pomyķl o rakietach i pchnięciu)
double m_dMaxForce;
// maksymalna prędkoķæ (radianów na sekundę), z jaką pojazd moŋe się obracaæ
double m_dMaxTurnRate;
public:
/* DODATKOWE SZCZEGÓĢY POMINIĘTE*/
};
Chociaŋ jest to wystarczająca iloķæ danych, aby przedstawiæ ruchomy obiekt, wciąŋ potrzebujemy sposobu na zapewnienie ruchomej istocie dostępu do róŋnych rodzajów zachowaņ sterujących. Utworzymy klasę Vehicle, która odziedziczy po MovingEntity i jest wģaķcicielem instancji klasy zachowania kierowniczego, SteeringBehaviors. SteeringBehaviors zawiera wszystkie róŋne zachowania związane z kierowaniem, które omówię w tej częķci. Więcej o tym za chwilę; najpierw spójrzmy na deklarację klasy pojazdu.
class Vehicle : public MovingEntity
{
private:
//wskažnik do danych ķwiatowych umoŋliwiający pojazdowi dostęp do dowolnej przeszkody
//dane ķcieŋki, ķciany lub agenta
GameWorld* m_pWorld;
Klasa GameWorld zawiera wszystkie dane i obiekty związane ze ķrodowiskiem, w którym znajdują się agenci, takie jak ķciany, przeszkody i tak dalej. Nie wymienię tutaj deklaracji, aby zaoszczędziæ miejsce, ale moŋe warto sprawdziæ GameWorld.h w swoim IDE w pewnym momencie, aby się o tym przekonaæ.
// klasa zachowania sterowniczego
SteeringBehaviors* m_pSteering;
Pojazd ma dostęp do wszystkich dostępnych zachowaņ kierowniczych poprzez wģasną instancję klasy zachowaņ kierowniczych.
public:
//aktualizuje pozycję i orientację pojazdu
void Update(double time_elapsed);
/* DODATKOWE SZCZEGÓĢY POMINIĘTE */
};
Relacje klas moŋna wyražnie zobaczyæ na uproszczonym diagramie UML pokazanym na rysunku
Aktualizacja fizyki pojazdu
Zanim przejdziemy do samych zachowaņ związanych z kierowaniem, chciaģbym poprowadziæ Cię przez metodę Vehicle :: Update. Waŋne jest, aby zrozumieæ kaŋdą linię kodu w tej funkcji, poniewaŋ jest to gģówny koņ roboczy klasy Vehicle.
bool Vehicle::Update(double time_elapsed)
{
// obliczyæ ģączną siģę z kaŋdego zachowania kierowania w
//liķcie pojazdów
SVector2D SteeringForce = m_pSteering->Calculate();
Najpierw obliczana jest siģa kierowania dla tego etapu symulacji. Metoda obliczania sumuje wszystkie aktywne zachowania kierownicy pojazdu i zwraca caģkowitą siģę kierowania.
//Acceleration = Force/Mass
SVector2D acceleration = SteeringForce / m_dMass;
Korzystając z praw fizyki Newtona, siģa kierująca jest przeksztaģcana w przyspieszenie.
// zaktualizuj prędkoķæ
m_vVelocity += acceleration * time_elapsed;
Za pomocą przyspieszenia moŋna zaktualizowaæ prędkoķæ pojazdu
/upewnij się, ŋe pojazd nie przekracza maksymalnej prędkoķci
m_vVelocity.Truncate(m_dMaxSpeed);
// zaktualizuj pozycję
m_vPos += m_vVelocity * time_elapsed;
Pozycję pojazdu moŋna teraz aktualizowaæ za pomocą nowej prędkoķci.
// zaktualizuj kurs, jeķli prędkoķæ pojazdu jest większa niŋ bardzo maģa
// wartoķæ
if (m_vVelocity.LengthSq() > 0.00000001)
{
m_vHeading = Vec2DNormalize(m_vVelocity);
m_vSide = m_vHeading.Perp();
}
Jak wspomniano wczeķniej, MovingEntity ma lokalny ukģad wspóģrzędnych, który musi byæ aktualizowany na kaŋdym etapie symulacji. Kurs pojazdu powinien zawsze byæ wyrównany z jego prędkoķcią, więc jest on aktualizowany, aby byģ równy znormalizowanemu wektorowi prędkoķci. Ale - i to jest waŋne - kurs jest obliczany tylko wtedy, gdy prędkoķæ pojazdu jest powyŋej bardzo maģej wartoķci progowej. Wynika to z faktu, ŋe jeķli wielkoķæ prędkoķci wynosi zero, program zawiesi się z bģędem dzielenia przez zero, a jeķli wielkoķæ nie jest zerowa, ale bardzo maģa, pojazd moŋe (w zaleŋnoķci od platformy i systemu operacyjnego) ruszyæ bģędnie kilka sekund po zatrzymaniu. Skģadnik boczny lokalnego ukģadu wspóģrzędnych moŋna ģatwo obliczyæ, wywoģując SVector2D :: Perp.
// traktuj ekran jak toroid
WrapAround(m_vPos, m_pWorld->cxClient(), m_pWorld->cyClient());
}
Na koniec uwaŋa się, ŋe obszar wyķwietlania zawija się od góry do doģu i od lewej do prawej (jeķli wyobraŋasz to sobie w 3D, byģby toroidalny - w ksztaģcie pączka). Dlatego sprawdza się, czy zaktualizowane poģoŋenie pojazdu przekroczyģo granice ekranu. Jeķli tak, pozycja jest odpowiednio zawijana. To nudne rzeczy na uboczu - przejdžmy dalej i baw się dobrze!
Zachowania sterujące
Teraz opiszę kaŋde zachowanie sterownicze indywidualnie. Po omówieniu ich wszystkich wyjaķnię klasę SteeringBehaviors, która je kapsuģkuje, i pokaŋę róŋne dostępne metody ich ģączenia. Pod koniec rozdziaģu przedstawię kilka wskazówek i wskazówek, które pozwolą w peģni wykorzystaæ moŋliwoķci sterowania.
Szukanie
Zachowanie polegające na wyszukiwaniu zachowania sterowniczego zwraca siģę, która kieruje agenta w kierunku pozycji docelowej. Programowanie jest bardzo proste. Kod wygląda następująco (zauwaŋ, ŋe m_pVehicle wskazuje na pojazd, który jest wģaķcicielem klasy SteeringBehaviors):
Vector2D SteeringBehaviors::Seek(Vector2D TargetPos)
{
Vector2D DesiredVelocity = Vec2DNormalize(TargetPos - m_pVehicle->Pos())
* m_pVehicle->MaxSpeed();
return (DesiredVelocity - m_pVehicle->Velocity());
}
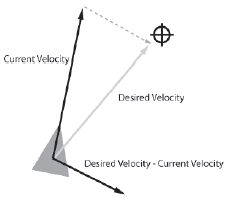
Najpierw obliczana jest poŋądana prędkoķæ. Jest to prędkoķæ, której agent będzie potrzebowaģ, aby osiągnąæ pozycję docelową w idealnym ķwiecie. Reprezentuje wektor od agenta do celu, skalowany do dģugoķci maksymalnej moŋliwej prędkoķci agenta. Siģa sterująca zwrócona tą metodą jest wymaganą siģą, która po dodaniu do wektora prędkoķci prądu czynnika daje poŋądaną prędkoķæ. Aby to osiągnąæ, wystarczy odjąæ bieŋącą prędkoķæ ķrodka od ŋądanej prędkoķci. Patrz rysunek
Kliknij lewym przyciskiem myszy, aby zmieniæ pozycję celu. Zauwaŋ, jak agent przekroczy cel, a następnie odwróci się, by ponownie się zbliŋyæ. Wielkoķæ przekroczenia zaleŋy od stosunku MaxSpeed do MaxForce. Moŋesz zmieniæ wielkoķæ tych wartoķci, naciskając klawisze Ins / Del i Home / End. Szukaj jest przydatny przy róŋnego rodzaju rzeczach. Jak zobaczysz, wiele innych zachowaņ sterujących będzie z niego korzystaæ.
Ucieczka
Ucieczka jest przeciwieņstwem poszukiwania. Zamiast wytworzyæ siģę sterującą, aby skierowaæ agenta w kierunku pozycji docelowej, ucieczka tworzy siģę, która kieruje agenta dalej. Oto kod:
Vector2D SteeringBehaviors::Flee(Vector2D TargetPos)
{
Vector2D DesiredVelocity = Vec2DNormalize(m_pVehicle->Pos() - TargetPos)
* m_pVehicle->MaxSpeed();
return (DesiredVelocity - m_pVehicle->Velocity());
}
Zauwaŋ, ŋe jedyną róŋnicą jest to, ŋe obliczana jest DesiredVelocity za pomocą wektora wskazującego w przeciwnym kierunku (m_pVehicle-> Pos () -TargetPos zamiast TargetPos - m_pVehicle-> Pos ()). Ucieczka moŋe byæ ģatwo dostosowana do generowania siģy ucieczki tylko wtedy, gdy pojazd znajdzie się w okreķlonym zasięgu celu. Wystarczy kilka dodatkowych wierszy kodu
Vector2D SteeringBehaviors::Flee(Vector2D TargetPos)
{
// uciekaj tylko, jeķli cel znajduje się w "odlegģoķci paniki". Pracuj
// w odlegģoķci do kwadratu.
const double PanicDistanceSq = 100.0 * 100.0;
if (Vec2DDistanceSq(m_pVehicle->Pos(), target) > PanicDistanceSq)
{
return Vector2D(0,0);
}
Vector2D DesiredVelocity = Vec2DNormalize(m_pVehicle->Pos() - TargetPos)
* m_pVehicle->MaxSpeed();
return (DesiredVelocity - m_pVehicle->Velocity());
}
Zauwaŋ, jak obliczana jest odlegģoķæ do celu w odlegģoķci do kwadratu. Jak widzieliķmy w częķci 1, ma to na celu zapisanie obliczania pierwiastka kwadratowego.
Przybycie
Szukanie jest przydatne, gdy agent porusza się we wģaķciwym kierunku, ale często chcesz, aby jego agenci zatrzymali się delikatnie w pozycji docelowej, a jak widzieliķcie, szukanie nie jest zbyt ķwietne w zatrzymywaniu się z gracją. Przyjazd to zachowanie, które steruje agentem w taki sposób, ŋe zwalnia do pozycji docelowej. Oprócz celu funkcja ta przyjmuje parametr wyliczonego typu Deceleration, okreķlony przez:
enum Deceleration{slow = 3, normal = 2, fast = 1};
Przybycie wykorzystuje tę wartoķæ do obliczenia, ile czasu agent potrzebuje na dotarcie do celu. Na podstawie tej wartoķci moŋemy obliczyæ, z jaką prędkoķcią agent musi podróŋowaæ, aby osiągnąæ ŋądaną pozycję w poŋądanym czasie. Następnie obliczenia przebiegają tak samo, jak w przypadku wyszukiwania.
Vector2D SteeringBehaviors::Arrive(Vector2D TargetPos,
Deceleration deceleration)
{
Vector2D ToTarget = TargetPos - m_pVehicle->Pos();
// obliczyæ odlegģoķæ do pozycji docelowej
double dist = ToTarget.Length();
if (dist > 0)
{
// poniewaŋ opóžnienie jest wyliczane jako liczba caģkowita, ta wartoķæ jest wymaga
// aby zapewniæ precyzyjne dostosowanie opóžnienia
const double DecelerationTweaker = 0.3;
// obliczyæ prędkoķæ wymaganą do osiągnięcia celu przy ŋądanym
// spowolnieniu
double speed = dist / ((double)deceleration * DecelerationTweaker);
// upewnij się, ŋe prędkoķæ nie przekracza maks
speed = min(speed, m_pVehicle->MaxSpeed());
// stąd postępuj podobnie jak Szukaj, chyba ŋe nie musimy się normalizowaæ
// wektor ToTarget, poniewaŋ juŋ zadaliķmy sobie trud
// obliczania jego dģugoķci: dist.
Vector2D DesiredVelocity = ToTarget * speed / dist;
return (DesiredVelocity - m_pVehicle->Velocity());
}
return Vector2D(0,0);
}
Teraz, gdy wiesz, co to robi, spójrz na plik wykonywalny wersji demo. Zauwaŋ, ŋe kiedy pojazd znajduje się daleko od celu, zachowanie przyježdzie dziaģa tak samo, jak szukanie, i jak opóžnienie dziaģa tylko wtedy, gdy pojazd zbliŋy się do celu.
Poķcig
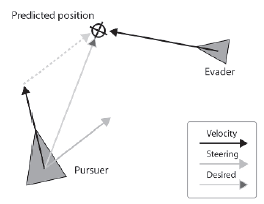
Zachowanie poķcigowe jest przydatne, gdy agent musi przechwyciæ ruchomy cel. Oczywiķcie moŋe nadal szukaæ aktualnej pozycji celu, ale tak naprawdę nie pomogģoby to stworzyæ iluzji inteligencji. Wyobraž sobie, ŋe znów jesteķ dzieckiem i bawisz się w berka na boisku szkolnym. Kiedy chcesz kogoķ oznaczyæ, nie biegniesz prosto na jego obecną pozycję (która skutecznie do niego dąŋy); przewidujesz, gdzie będą w przyszģoķci, i biegniesz w kierunku tego przesunięcia, wprowadzając zmiany w miarę zmniejszania luki. Zobacz rysunek. Takie zachowanie chcemy pokazaæ naszym agentom.
Powodzenie funkcji poķcigu zaleŋy od tego, jak dobrze przeķladowca jest w stanie przewidzieæ trajektorię uniku Moŋe to byæ bardzo skomplikowane, dlatego trzeba osiągnąæ kompromis, aby uzyskaæ odpowiednią wydajnoķæ bez zuŋywania zbyt wielu cykli zegara. Istnieje jedna sytuacja, w której przeķladowca moŋe się wczeķnie wydostaæ: jeķli uciekający jest przed nami i prawie bezpoķrednio jest skierowany do agenta, agent powinien skierowaæ się bezpoķrednio do aktualnej pozycji uciekiniera. Moŋna to szybko obliczyæ za pomocą produktów punktowych. W przykģadowym kodzie odwrócony nagģówek uciekiniera musi znajdowaæ się w odlegģoķci okoģo 20 stopni (w przybliŋeniu) od agenta, aby uznaæ go za "skierowanego w stronę". Jedną z trudnoķci w tworzeniu dobrego predyktora jest decyzja, jak daleko w przyszģoķæ agent powinien przewidzieæ. Oczywiste jest, ŋe okres patrzenia w przyszģoķæ powinien byæ proporcjonalny do separacji między przeķladowcą a jego pogromcą i odwrotnie proporcjonalny do prędkoķci przeķladowcy i pędnika. Po podjęciu decyzji o tym czasie osoba ķcigająca moŋe obliczyæ szacunkową przyszģą pozycję. Rzuæmy okiem na kod tego zachowania:
Vector2D SteeringBehaviors::Pursuit(const Vehicle* evader)
{
// jeķli evader jest przed nami i jest skierowany w stronę agenta, moŋemy
// po prostu sprawdziæ aktualną pozycję uciekiniera
Vector2D ToEvader = evader->Pos() - m_pVehicle->Pos();
double RelativeHeading = m_pVehicle->Heading().Dot(evader->Heading());
if ((ToEvader.Dot(m_pVehicle->Heading()) > 0) &&
(RelativeHeading < -0.95)) //acos(0.95)=18 degs
{
return Seek(evader->Pos());
}
// Nie rozwaŋamy tego z wyprzedzeniem, więc przewidujemy, gdzie będzie uceikinier
// czas oczekiwania jest proporcjonalny do odlegģoķci między uciekinierem
// a przeķladowcą; i jest odwrotnie proporcjonalny do sumy
// rędkoķci agentów
double LookAheadTime = ToEvader.Length() /
(m_pVehicle->MaxSpeed() + evader->Speed());
// teraz przymierz się do przewidywanej przyszģej pozycji ewakuatora
return Seek(evader->Pos() + evader->Velocity() * LookAheadTime);
}
Niektóre modele lokomocji mogą równieŋ wymagaæ uwzględnienia pewnego czasu w celu obrócenia agenta w kierunku przesunięcia. Moŋesz to zrobiæ po prostu, zwiększając LookAheadTime o wartoķæ proporcjonalną do iloczynu punktowego dwóch nagģówków i maksymalnej prędkoķci skrętu pojazdu. Coķ jak:
LookAheadTime += TurnAroundTime(m_pVehicle, evader->Pos());
Where TurnAroundTime is the function:
double TurnaroundTime(const Vehicle* pAgent, Vector2D TargetPos)
{
//okreķliæ znormalizowany wektor do celu
Vector2D toTarget = Vec2DNormalize(TargetPos - pAgent->Pos());
double dot = pAgent->Heading().Dot(toTarget);
// zmieņ tę wartoķæ, aby uzyskaæ poŋądane zachowanie. Im wyŋszy maksymalny obrót
// wskažnik pojazdu, tym wyŋsza powinna byæ ta wartoķæ. Jeķli pojazd
// zmierza w kierunku przeciwnym do swojej pozycji docelowej, a następnie wartoķci
// 0,5 oznacza, ŋe funkcja zwróci czas 1 sekundy dla
// pojazd do zawrócenia
const double coefficient = 0.5;
// iloczyn skalarny daje wartoķæ 1, jeķli cel znajduje się bezpoķrednio przed nami, i -1
// jeķli jest bezpoķrednio z tyģu. Odejmowanie 1 i mnoŋenie przez minus z
// wspóģczynnik daje wartoķæ dodatnią proporcjonalną do obrotu
//przemieszczenie pojazdu i ģadunek.
return (dot - 1.0) * -coefficient;
}
Demo poķcigu pokazuje maģy pojazd ķcigany przez większy. Celownik wskazuje szacunkową przyszģą pozycję uciekiniera. (Uciekinier wykorzystuje niewielką iloķæ ruchów kierownicą, aby wpģynąæ na jego ruch. Zaraz zakryję wędrówkę.). Ofiarę przeķladowcy ustawia się, przekazując odpowiednią metodę wskažnikowi do danego celu. Aby skonfigurowaæ sytuację podobną do wersji demonstracyjnej tego zachowania, naleŋy utworzyæ dwóch agentów, jednego do ķcigania, a drugiego do wędrówki, tak jak poniŋej:
Vehicle* prey = new Vehicle(/* params omitted */);
prey->Steering()->WanderOn();
Vehicle* predator = new Vehicle(/* params omitted */);
predator->Steering()->PursuitOn(prey);
Zrozumiaģeķ? OK, przejdžmy do pogoni za czymķ przeciwnym: uchylania się.
Uchylanie się
Unikanie jest prawie takie samo jak poķcig, z tą róŋnicą, ŋe tym razem uciekinier ucieka od szacowanej przyszģej pozycji.
Vector2D SteeringBehaviors::Evade(const Vehicle* pursuer)
{
/* Tym razem nie jest konieczne sprawdzenie czeku na kierunek */
Vector2D ToPursuer = pursuer->Pos() - m_pVehicle->Pos();
//czas oczekiwania jest proporcjonalny do odlegģoķci między podąŋaniem
// i uciekinierem; i jest odwrotnie proporcjonalny do sumy
// prędkoķci agentów
double LookAheadTime = ToPursuer.Length() /
(m_pVehicle->MaxSpeed() + pursuer->Speed());
// teraz uciekaj od przewidywanej przyszģej pozycji przeķladowcy
return Flee(pursuer->Pos() + pursuer->Velocity() * LookAheadTime);
}
Pamiętaj, ŋe tym razem nie jest konieczne sprawdzenie wyboru kierunku jazdy.
Bģądzenie
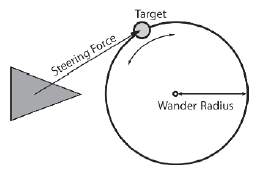
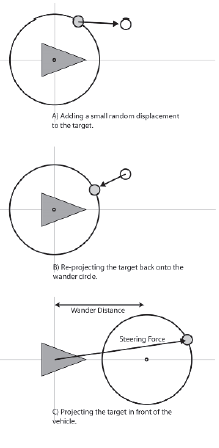
Często podczas wędrówki agenta często znajdujesz uŋyteczny skģadnik. Zostaģ zaprojektowany w celu wytworzenia siģy sterującej, która sprawi wraŋenie przypadkowego przejķcia przez ķrodowisko agenta. Naiwnym podejķciem jest obliczanie losowej siģy kierowania za kaŋdym razem, ale powoduje to roztrzęsienie bez moŋliwoķci uzyskania dģugich uporczywych zwrotów. (Wģaķciwie doķæ sprytną funkcję losową, szum Perlina, moŋna wykorzystaæ do pģynnego skrętu, ale nie jest to bardzo przyjazne procesorowi. Nadal warto się zastanowiæ, jeķli znudzi Ci się deszczowy haģas Perlina ma wiele zastosowaņ.) Rozwiązaniem Reynoldsa jest rzutowanie koģa przed pojazdem i kierowanie się w kierunku celu, który musi poruszaæ się wzdģuŋ obwodu. Za kaŋdym razem do tego celu dodaje się niewielkie przypadkowe przemieszczenie, które z czasem przesuwa się do tyģu i do przodu wzdģuŋ obwodu koģa, tworząc piękny ruch bez drgaņ. Metodę tę moŋna zastosowaæ do wytworzenia caģego zakresu losowego ruchu, od bardzo pģynnych falujących zakrętów po dzikie wiry typu Strittly Ballroom i piruety, w zaleŋnoķci od wielkoķci koģa, odlegģoķci od pojazdu i wielkoķci przypadkowego przemieszczenia kaŋdej klatki. Jak mówią, obraz jest wart tysiąca sģów, więc prawdopodobnie warto zapoznaæ się z rysunkiem, aby uzyskaæ lepsze zrozumienie.
Pozwól mi przeprowadziæ Cię krok po kroku przez kod. Najpierw są trzy zmienne skģadowe czģonka, które wykorzystują:
double m_dWanderRadius;
Jest to promieņ ograniczającego koģa.
double m_dWanderDistance;
Jest to odlegģoķæ, jaką krąg wędrujący rzutuje przed agentem
double m_dWanderJitter;
Wreszcie, m_dWanderJitter to maksymalna wielkoķæ przypadkowego przemieszczenia, którą moŋna dodaæ do celu co sekundę. Teraz sama metoda:
SVector2D SteeringBehaviors::Wander()
{
// najpierw dodaj maģy losowy wektor do pozycji celu (RandomClampe
// zwraca wartoķæ od -1 do 1)
m_vWanderTarget += SVector2D(RandomClamped() * m_dWanderJitter,
RandomClamped() * m_dWanderJitter);
m_dWanderRadius, wyķrodkowany na poježdzie (początkowa pozycja m_vWanderTarget jest ustalona w konstruktorze SteeringBehaviors). Z kaŋdym krokiem maģe losowe przemieszczenie jest dodawane do pozycji celu wędrownego.
/ ponownie skieruj ten nowy wektor z powrotem na okrąg jednostkowy
m_vWanderTarget.Normalize();
// zwiększ dģugoķæ wektora do tego samego promienia
// koģa wędrownego
m_vWanderTarget *= m_dWanderRadius;
Następnym krokiem jest przerzucenie tego nowego celu z powrotem na krąg wędrówki. Osiąga się to poprzez normalizację wektora i pomnoŋenie go przez promieņ koģa wędrującego.
// przesuņ cel na pozycję WanderDist przed agentem
SVector2D targetLocal = m_vWanderTarget + SVector2D(m_dWanderDistance, 0);
// rzutowaæ cel w przestrzeņ ķwiatową
SVector2D targetWorld = PointToWorldSpace(targetLocal,
m_pVehicle->Heading(),
m_pVehicle->Side(),
m_pVehicle->Pos());
// i kierujcie się w tym kierunku
return targetWorld - m_pVehicle->Pos();
}
Wreszcie nowy cel zostaje przesunięty przed pojazdem o kwotę równą m_dWanderDistance i rzutowany w przestrzeņ kosmiczną. Siģa kierowania jest następnie obliczana jako wektor do tej pozycji.
Jeķli masz pod ręką komputer, zalecamy sprawdzenie wersji demonstracyjnej tego zachowania. Zielone kóģko to ograniczające "kóģko wędrujące", a czerwona kropka cel. Demo pozwala dostosowaæ rozmiar kręgu wędrówki, iloķæ drgaņ i odlegģoķæ wędrówki, dzięki czemu moŋna obserwowaæ ich wpģyw na zachowanie. Zwróæ uwagę na związek między odlegģoķcią bģądzenia a zmianą kąta siģy kierowania zwróconej z metody. Gdy kóģko wędrowne znajduje się daleko od pojazdu, metoda powoduje niewielkie zmiany kąta, ograniczając w ten sposób pojazd do maģych zakrętów. Gdy koģo zostanie przesunięte bliŋej pojazdu, iloķæ, którą moŋe obróciæ, staje się coraz bardziej ograniczona. Jeķli chcesz, aby agenci wędrowali w trzech wymiarach (jak statek kosmiczny patrolujący jego terytorium), wszystko, co musisz zrobiæ, to ograniczyæ cel wędrówki do kuli zamiast koģa.
Unikanie przeszkód
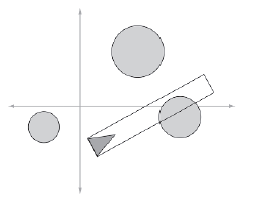
Unikanie przeszkód to zachowanie, które kieruje pojazdem, aby unikaæ przeszkód leŋących na jego drodze. Przeszkoda to dowolny obiekt, który moŋe byæ przybliŋony przez okrąg (lub kulę, jeķli pracujesz w 3D). Uzyskuje się to poprzez kierowanie pojazdem, aby zachowaæ prostokątną skrzynkę detekcji obszaru, rozciągającą się do przodu od pojazdu bez kolizji. Szerokoķæ skrzynki wykrywającej jest równa promieniu ograniczającemu pojazdu, a jej dģugoķæ jest proporcjonalna do aktualnej prędkoķci pojazdu - im szybciej jedzie, tym dģuŋsza jest skrzynka wykrywająca. Myķlę, ŋe zanim opiszę ten proces, dobrym pomysģem byģoby pokazanie diagramu. Rycina pokazuje pojazd, niektóre przeszkody i pole wykrywania zastosowane w obliczeniach.
Znalezienie najbliŋszego punktu przecięcia
Proces sprawdzania skrzyŋowaņ z przeszkodami jest doķæ skomplikowany, więc zróbmy to krok po kroku.
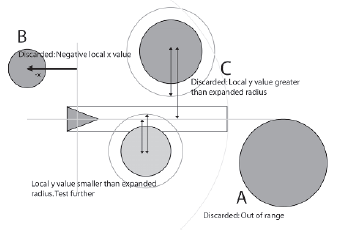
A) Pojazd powinien braæ pod uwagę tylko te przeszkody, które znajdują się w zasięgu pola detekcji. Początkowo algorytm unikania przeszkód dokonuje iteracji przez wszystkie przeszkody w ķwiecie gry i oznacza te, które znajdują się w tym zakresie, do dalszego rozwaŋenia.
B) Algorytm przeksztaģca następnie wszystkie oznaczone przeszkody w lokalną przestrzeņ pojazdu. Uģatwia to ŋycie, poniewaŋ po transformacji moŋna odrzuciæ dowolne obiekty o ujemnej lokalnej wspóģrzędnej x.
C) Algorytm musi teraz sprawdziæ, czy przeszkody nie pokrywają się z polem wykrywania. Przydatne są tutaj lokalne wspóģrzędne, poniewaŋ wystarczy rozszerzyæ promieņ ograniczający przeszkodę o poģowę szerokoķci pola wykrywania (promieņ ograniczający pojazdu), a następnie sprawdziæ, czy jego lokalna wartoķæ y jest mniejsza od tej wartoķci. Jeķli tak nie jest, nie będzie przecinaæ pola wykrywania, a następnie moŋe zostaæ odrzucone.
Rysunek powinien pomóc ci wyjaķniæ te trzy pierwsze kroki. Litery na przeszkodach na schemacie odpowiadają opisom.
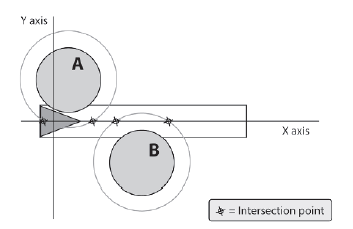
D) W tym momencie pozostaģy tylko przeszkody, które przecinają pole detekcji. Teraz trzeba znaležæ punkt przecięcia najbliŋego pojazdu. Po raz kolejny na ratunek przybywa lokalna przestrzeņ. Krok C poszerzyģ promieņ ograniczający obiektu. Korzystając z tego, moŋna uŋyæ prostego testu przecięcia linii / okręgu, aby znaležæ miejsce, w którym rozszerzony okrąg przecina oķ x. Będą dwa punkty przecięcia, jak pokazano na rysunku poniŋej. (Nie musimy się martwiæ przypadkiem, w którym jedno koģo styczne do koģa - pojazd wydaje się po prostu oderwaæ się od przeszkody.) Pamiętaj, ŋe przed pojazdem moŋna mieæ przeszkodę, ale jest będzie miaģ punkt przecięcia z tyģu pojazdu. Jest to pokazane na rysunku przez przeszkodę A. Algorytm odrzuca te przypadki i bierze pod uwagę tylko punkty przecięcia leŋące na dodatniej osi x.
Algorytm testuje wszystkie pozostaģe przeszkody, aby znaležæ tę z najbliŋszym (dodatnim) punktem przecięcia. Zanim pokaŋę ci, jak obliczana jest siģa kierowania, pozwól mi wymieniæ częķæ kodu algorytmu unikania przeszkód, który realizuje kroki od A do D.
Vector2D
SteeringBehaviors::ObstacleAvoidance(const std::vector
&obstacles)
{
//dģugoķæ skrzynki wykrywającej jest proporcjonalna do prędkoķci agenta
m_dDBoxLength = Prm.MinDetectionBoxLength +
(m_pVehicle->Speed()/m_pVehicle->MaxSpeed()) *
Prm.MinDetectionBoxLength;
Wszystkie parametry uŋywane w projekcie są odczytywane z pliku inicjującego o nazwie Params.ini i przechowywane w klasie singleton ParamLoader. Wszystkie dane w tej klasie są publiczne i są ģatwo dostępne poprzez #definition Prm (#define Prm (* ParamLoader :: Instance ())). Jeķli konieczne jest dodatkowe wyjaķnienie, zobacz plik ParamLoader.h.
// oznaczyæ wszystkie przeszkody w zasięgu pola do przetworzenia
m_pVehicle->World()->TagObstaclesWithinViewRange(m_pVehicle, m_dDBoxLength);
// pozwoli to ķledziæ najbliŋszą przeszkodę (CIB)
BaseGameEntity* ClosestIntersectingObstacle = NULL;
// zostanie to wykorzystane do ķledzenia odlegģoķci do CIB
double DistToClosestIP = MaxDouble;
// spowoduje to zapisanie przeksztaģconych lokalnych wspóģrzędnych CIB
Vector2D LocalPosOfClosestObstacle;
std::vector
while(curOb != obstacles.end())
{
// jeķli przeszkoda zostaģa oznaczona w zasięgu, kontynuuj
if ((*curOb)->IsTagged())
{
//obliczyæ pozycję tej przeszkody w przestrzeni lokalneje
Vector2D LocalPos = PointToLocalSpace((*curOb)->Pos(),
m_pVehicle->Heading(),
m_pVehicle->Side(),
m_pVehicle->Pos());
// jeķli pozycja lokalna ma ujemną wartoķæ x, to musi leŋeæ
// za agentem. (w takim przypadku moŋna to zignorowaæ)
if (LocalPos.x >= 0)
{
// jeķli odlegģoķæ od osi x do pozycji obiektu jest mniejsza
// niŋ jego promieņ + poģowa szerokoķci pola detekcji
// istnieje potencjalne przecięcie.
double ExpandedRadius = (*curOb)->BRadius() + m_pVehicle->BRadius();
if (fabs(LocalPos.y) < ExpandedRadius)
{
// teraz, aby wykonaæ test przecięcia linii / okręgu. Ķrodek koģa
// jest reprezentowany przez (cX, cY). Punkty przecięcia to
//podane przez wzór x = cX +/-sqrt(r^2-cY^2) for y=0.
// Musimy tylko spojrzeæ na najmniejszą dodatnią wartoķæ x, poniewaŋ
// będzie to najbliŋszy punkt przecięcia.
double cX = LocalPos.x;
double cY = LocalPos.y;
//wystarczy tylko raz obliczyæ częķæ sqrt powyŋszego równania
double SqrtPart = sqrt(ExpandedRadius*ExpandedRadius - cY*cY);
double ip = A - SqrtPart;
if (ip <= 0)
{
ip = A + SqrtPart;
}
// sprawdž, czy jest to jak dotąd najbliŋsze. Jeķli tak,
// zapisz przeszkodę i jej lokalne wspóģrzędne
if (ip < DistToClosestIP)
{
DistToClosestIP = ip;
ClosestIntersectingObstacle = *curOb;
LocalPosOfClosestObstacle = LocalPos;
}
}
}
}
++curOb;
}
Obliczanie siģy kierowania
Okreķlenie siģy kierowania jest ģatwe. Oblicza się go w dwóch częķciach: siģy bocznej i siģy hamowania.
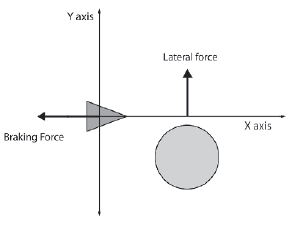
Istnieje wiele sposobów obliczania siģy bocznej, ale preferuję odjęcie wartoķci y lokalnego poģoŋenia przeszkody od jej promienia. Powoduje to boczną siģę kierującą z dala od przeszkody, która zmniejsza się wraz z odlegģoķcią przeszkody od osi X. Siģa ta jest skalowana proporcjonalnie do odlegģoķci pojazdu od przeszkody (poniewaŋ im pojazd znajduje się bliŋej przeszkody, tym szybciej powinien zareagowaæ). Kolejnym skģadnikiem siģy kierowania jest siģa hamowania. Jest to siģa dziaģająca do tyģu, wzdģuŋ osi poziomej, jak pokazano na rysunku, a takŋe jest skalowana proporcjonalnie do odlegģoķci pojazdu od przeszkody. Siģa kierowania zostaje ostatecznie przeksztaģcona w przestrzeņ ķwiata, w wyniku czego wartoķæ jest zwracana z metody. Kod jest następujący
// jeķli znaležliķmy przeszkodę przecinającą,
// obliczyæ od niej siģę kierującą
Vector2D SteeringForce;
if (ClosestIntersectingObstacle)
{
// im bliŋej znajduje się agent, tym silniejsza powinna byæ siģa kierowania
// siģa kierująca
double multiplier = 1.0 + (m_dDBoxLength - LocalPosOfClosestObstacle.x) /
m_dDBoxLength;
// obliczyæ siģę boczną
SteeringForce.y = (ClosestIntersectingObstacle->BRadius()-
LocalPosOfClosestObstacle.y) * multiplier;
// zastosowaæ siģę hamowania proporcjonalną do odlegģoķci przeszkody od
//pojazdu.
const double BrakingWeight = 0.2;
SteeringForce.x = (ClosestIntersectingObstacle->BRadius() -
LocalPosOfClosestObstacle.x) *
BrakingWeight;
}
// na koniec przekonwertuj wektor sterujący z przestrzeni lokalnej na ķwiatową
return VectorToWorldSpace(SteeringForce,
m_pVehicle->Heading(),
m_pVehicle->Side());
}
WSKAZÓWKA Przy wdraŋaniu omijania przeszkód w trzech wymiarach, uŋyj kul, aby przybliŋyæ przeszkody i walec zamiast skrzynki wykrywającej. Matematyka sprawdzania względem kuli nie róŋni się tak bardzo od sprawdzania względem koģa. Gdy przeszkody zostaną przeksztaģcone w lokalną przestrzeņ, kroki A i B są takie same, jak juŋ widzieliķcie, a krok C polega tylko na sprawdzeniu względem innej osi.
Unikanie ķcian
Ķciana to segment liniowy (w 3D, wielokąt) prostopadģy w kierunku, w którym jest skierowany. Unikanie ķcian steruje, aby uniknąæ potencjalnych kolizji ze ķcianą. Dokonuje tego poprzez rzutowanie trzech "czujników" przed pojazd i testowanie, czy którekolwiek z nich przecinają się ze ķcianami w ķwiecie gry. (Maģy "odcinek" w poģowie ķciany wskazuje kierunek normalnej ķciany.) Jest to podobne do sposobu, w jaki koty i gryzonie uŋywają swoich wąsów do poruszania się po otoczeniu w ciemnoķci
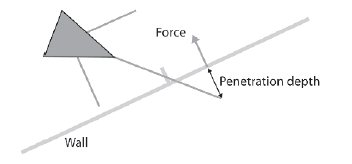
Po znalezieniu najbliŋszej przecinającej się ķciany (jeķli istnieje), obliczana jest siģa kierowania. Oblicza się to na podstawie obliczenia, jak daleko koņcówka czujnika dotarģa do ķciany, a następnie poprzez wytworzenie siģy tej wielkoķci w kierunku normalnej ķciany.
Vector2D SteeringBehaviors::WallAvoidance(const std::vector
{
//the feelers are contained in a std::vector, m_Feelers
CreateFeelers();
double DistToThisIP = 0.0;
double DistToClosestIP = MaxDouble;
//this will hold an index into the vector of walls
int ClosestWall = -1;
Vector2D SteeringForce,
point, //used for storing temporary info
ClosestPoint; //holds the closest intersection point
//examine each feeler in turn
for (int flr=0; flr
//run through each wall checking for any intersection points
for (int w=0; w
if (LineIntersection2D(m_pVehicle->Pos(),
m_Feelers[flr],
walls[w].From(),
walls[w].To(),
DistToThisIP,
point))
{
//is this the closest found so far? If so keep a record
if (DistToThisIP < DistToClosestIP)
{
DistToClosestIP = DistToThisIP;
ClosestWall = w;
ClosestPoint = point;
}
}
}//next wall
//if an intersection point has been detected, calculate a force
//that will direct the agent away
if (ClosestWall >=0)
{
//calculate by what distance the projected position of the agent
//will overshoot the wall
Vector2D OverShoot = m_Feelers[flr] - ClosestPoint;
//create a force in the direction of the wall normal, with a
//magnitude of the overshoot
SteeringForce = walls[ClosestWall].Normal() * OverShoot.Length();
}
}//next feeler
return SteeringForce;
}
Znalazģem podejķcie z trzema czujnikami, które daje dobre wyniki, ale moŋliwe jest osiągnięcie rozsądnej wydajnoķci za pomocą tylko jednego czujnika, który stale skanuje w lewo i prawo przed pojazdem. Wszystko zaleŋy od liczby cykli procesora, z którymi musisz graæ i od tego, jak dokģadne jest zachowanie.
UWAGA Jeķli jesteķ niecierpliwy i patrzyģeķ juŋ na kod žródģowy, byæ moŋe zauwaŋyģeķ, ŋe koņcowa funkcja aktualizacji w žródle jest nieco bardziej skomplikowana niŋ podstawowa funkcja aktualizacji wymieniona wczeķniej. Wynika to z faktu, ŋe wiele technik, które opiszę pod koniec tej częķci, wymaga dodania lub nawet zmiany tej funkcji. Wszystkie zachowania sterujące wymienione na kilku kolejnych stronach wykorzystują jednak ten podstawowy szkielet.
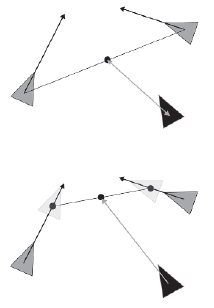
Wstawianie
Interpose zwraca siģę kierującą, która porusza pojazd do punktu ķrodkowego linii urojonej, ģącząc dwóch innych agentów (lub punkty w przestrzeni lub agenta i punkt). Ochroniarz przyjmujący kulę dla swojego pracodawcy lub piģkarza otzymującego kartkę są przykģadami tego rodzaju zachowania. Podobnie jak poķcig, pojazd musi oszacowaæ, gdzie w przyszģoķci będą znajdowaæ się dwaj agenci w czasie T. Następnie moŋe skierowaæ się w kierunku tej pozycji. Ale skąd wiemy, jaka jest najlepsza wartoķæ T? Odpowiedž brzmi: nie, więc zamiast tego dokonujemy obliczeņ. Pierwszym krokiem w obliczaniu tej siģy jest okreķlenie punktu ķrodkowego linii ģączącej pozycje agentów w bieŋącym kroku czasu. Odlegģoķæ od tego punktu jest obliczana, a wartoķæ dzielona przez maksymalną prędkoķæ pojazdu, aby daæ czas potrzebny na przebycie dystansu. To jest nasza wartoķæ T. Patrz rysunek 3.11, góra. Za pomocą T pozycje agentów są ekstrapolowane w przyszģoķæ. Punkt ķrodkowy tych przewidywanych pozycji jest okreķlany, a na koniec pojazd uŋywa
zachowania przylotu, aby kierowaæ się do tego punktu.
Oto listing:
Vector2D SteeringBehaviors::Interpose(const Vehicle* AgentA,
const Vehicle* AgentB)
{
// najpierw musimy dowiedzieæ się, gdzie będą w przyszģoķci dwaj agenci w czasie T.
// Przybliŋa się to przez okreķlenie czasu potrzebnego do osiągnięcia
// punktu ķrodkowego w bieŋącym czasie przy maksymalnej prędkoķci.
Vector2D MidPoint = (AgentA->Pos() + AgentB->Pos()) / 2.0;
double TimeToReachMidPoint = Vec2DDistance(m_pVehicle->Pos(), MidPoint) /
m_pVehicle->MaxSpeed();
// teraz mamy T, zakģadamy, ŋe agent A i agent B będą kontynuowaæ
// prostą trajektorię i ekstrapolowaæ, aby uzyskaæ swoje przyszģe pozycje
Vector2D APos = AgentA->Pos() + AgentA->Velocity() * TimeToReachMidPoint;
Vector2D BPos = AgentB->Pos() + AgentB->Velocity() * TimeToReachMidPoint;
// obliczyæ punkt ķrodkowy tych przewidywanych pozycji
MidPoint = (APos + BPos) / 2.0;
// następnie kieruj się, aby do niego dotrzeæ
return Arrive(MidPoint, fast);
}
Naleŋy pamiętaæ, ŋe przyjazd jest wywoģywany z szybkim zwalnianiem, umoŋliwiając pojazdowi jak najszybsze osiągnięcie pozycji docelowej. Demo tego zachowania pokazuje czerwony pojazd próbujący wejķæ w interakcję między dwoma niebieskimi wędrownymi pojazdami.
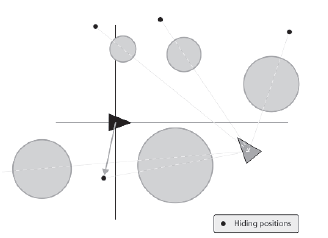
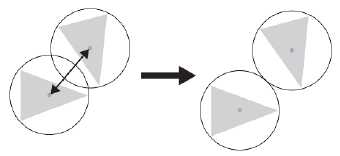
Ukrycie
Hide stara się ustawiæ pojazd tak, aby przeszkoda znajdowaģa się zawsze między nim a agentem - myķliwym - przed którym się ukrywa. Moŋesz uŋyæ tego zachowania nie tylko w sytuacjach, w których potrzebujesz, aby NPC ukryģ się przed osģoną znajdującą się jak gracz podczas strzelania, ale takŋe w sytuacjach, w których chciaģbyķ, aby NPC podkradģ się do gracza. Na przykģad moŋesz stworzyæ NPC zdolnego do przeķladowania gracza przez ponury las, skaczącego z drzewa na drzewo. Przeraŋający! Metoda, którą wolę wprowadziæ w to zachowanie, jest następująca:
Krok pierwszy. Dla kaŋdej z przeszkód wyznacza się kryjówkę.
Są one obliczane za pomocą metody GetHidingPosition, która wygląda następująco:
SVector2D SteeringBehaviors::GetHidingPosition(const SVector2D& posOb,
const double radiusOb,
const SVector2D& posTarget)
{
// obliczyæ, jak daleko agent ma byæ od promienia ograniczającego
// wybraną przeszkodę
const double DistanceFromBoundary = 30.0;
double DistAway = radiusOb + DistanceFromBoundary;
// obliczyæ kurs w kierunku obiektu od celu
SVector2D ToOb = Vec2DNormalize(posOb - posTarget);
// skaluj go do rozmiaru i dodaj do pozycji przeszkody
/kryjówkę
return (ToOb * DistAway) + posOb;
}
Biorąc pod uwagę poģoŋenie celu oraz poģoŋenie i promieņ przeszkody, ta metoda oblicza pozycję DistanceFromBoundary od promienia granicznego obiektu i bezpoķrednio naprzeciw celu. Robi to, skalując znormalizowany wektor "do przeszkody" o wymaganą odlegģoķæ od ķrodka przeszkody, a następnie dodając wynik do pozycji przeszkody. Czarne kropki na powyŋszym rysunku pokazują ukryte miejsca zwrócone tą metodą dla tego przykģadu.
Krok drugi. Odlegģoķæ do kaŋdego z tych miejsc jest okreķlana. Następnie pojazd wykorzystuje zachowanie przylotu do kierowania w kierunku najbliŋszego. Jeķli nie moŋna znaležæ odpowiednich przeszkód, pojazd omija cel. Oto jak to się robi w kodzie:
SVector2D SteeringBehaviors::Hide(const Vehicle* target,
vector
{
double DistToClosest = MaxDouble
SVector2D BestHidingSpot;
std::vector
while(curOb != obstacles.end())
{
// obliczyæ poģoŋenie kryjówki dla tej przeszkody
SVector2D HidingSpot = GetHidingPosition((*curOb)->Pos(),
(*curOb)->BRadius(),
target->Pos());
// pracuj w kwadracie odlegģoķci, aby znaležæ najbliŋsze
// miejsce ukrycia agenta
double dist = Vec2DDistanceSq(HidingSpot, m_pVehicle->Pos());
if (dist < DistToClosest)
{
DistToClosest = dist;
BestHidingSpot = HidingSpot;
}
++curOb;
}
//zakoņcz
// jeķli nie zostaną znalezione odpowiednie przeszkody, omiņ cel
if (DistToClosest == MaxDouble)
{
return Evade(target);
}
// w przeciwnym razie uŋyj Przybycie w kryjówce
return Arrive(BestHidingSpot, fast);
}
Istnieje kilka modyfikacji tego algorytmu:
1. Moŋesz pozwoliæ pojazdowi na ukrycie się tylko wtedy, gdy cel znajduje się w jego polu widzenia. Ma to jednak tendencję do niezadowalającego dziaģania, poniewaŋ pojazd zaczyna zachowywaæ się jak dziecko ukrywające się przed potworami pod poķcielą. Jestem pewien, ŋe pamiętasz uczucie - efekt "jeķli go nie widzisz, to cię nie widzi". Moŋe to dziaģaæ, gdy jesteķ dzieckiem, ale takie zachowanie powoduje, ŋe pojazd wydaje się gģupi. Moŋna temu przeciwdziaģaæ, dodając efekt czasowy, dzięki czemu pojazd ukryje się, jeķli cel będzie widoczny lub jeķli zobaczyģ cel w ciągu ostatnich n sekund. Daje to rodzaj pamięci i daje rozsądnie wyglądające zachowanie.
2. To samo co powyŋej, ale tym razem pojazd próbuje się ukryæ tylko wtedy, gdy pojazd widzi cel, a cel widzi pojazd.
3. Moŋe byæ poŋądane wytworzenie siģy, która kieruje pojazdem, tak aby zawsze sprzyjaģ ukryciu pozycji z boku lub z tyģu przeķladowcy. Moŋna to ģatwo osiągnąæ za pomocą przyjaciela, iloczynu skalarnego, w celu odchylenia odlegģoķci zwróconych z GetHidingPosition.
4. Na początku dowolnej z metod moŋna sprawdziæ, czy cel znajduje się w "odlegģoķci zagroŋenia" przed dalszymi obliczeniami. Jeķli cel nie jest zagroŋeniem, metoda moŋe natychmiast powróciæ z wektorem zerowym.
Ķcieŋka
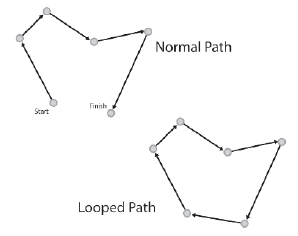
Ķcieŋka podąŋająca tworzy siģę kierującą, która porusza pojazdem wzdģuŋ szeregu punktów trasy tworzących ķcieŋkę. Czasami ķcieŋki mają punkt początkowy i koņcowy, a innym razem zapętlają się wokóģ siebie, tworząc niekoņczącą się, zamkniętą ķcieŋkę.
Znajdziesz niezliczone zastosowania korzystania ze ķcieŋek w grze. Moŋesz ich uŋywaæ do tworzenia agentów, którzy patrolują waŋne obszary mapy, aby umoŋliwiæ jednostkom przemierzanie trudnego terenu lub pomóc samochodom wyķcigowym w nawigacji po torze wyķcigowym. Są przydatne w większoķci sytuacji, w których agent musi odwiedziæ szereg punktów kontrolnych. Ķcieŋki, którymi podąŋają pojazdy , są opisane przez std :: list Vector2D. Ponadto pojazd musi równieŋ wiedzieæ, jaki jest aktualny punkt trasy i czy jest to ķcieŋka zamknięta, czy teŋ nie, aby umoŋliwiæ mu podjęcie odpowiednich dziaģaņ po osiągnięciu koņcowego punktu trasy. Jeķli jest to zamknięta ķcieŋka, powinna wróciæ do pierwszego punktu na liķcie i zacząæ od nowa. Jeķli jest to otwarta ķcieŋka, pojazd powinien po prostu zwolniæ do zatrzymania (przybycia) nad ostatnim punktem trasy. Path to klasa, która opiekuje się wszystkimi tymi szczegóģami. Nie wymienię go tutaj, ale moŋesz chcieæ to sprawdziæ w swoim IDE. Moŋna go znaležæ w pliku Path.h. Najprostszym sposobem podąŋania ķcieŋką jest ustawienie bieŋącego punktu na pierwszy na liķcie, kierowanie się w jego kierunku za pomocą funkcji wyszukiwania, aŋ pojazd znajdzie się w jego odlegģoķci docelowej, a następnie zģapanie następnego punktu i poszukiwanie go itd. dopóki bieŋący punkt nie będzie ostatnim punktem na liķcie. Kiedy tak się stanie, pojazd powinien dotrzeæ do bieŋącego punktu trasy lub, jeķli ķcieŋka jest zamkniętą pętlą, aktualny punkt trasy powinien byæ ponownie ustawiony na pierwszym na liķcie, a pojazd po prostu szuka. Oto kod następującej ķcieŋki:
SVector2D SteeringBehaviors::FollowPath()
{
// przejdž do następnego celu, jeķli jest wystarczająco blisko bieŋącego celu
// (pracując w odlegģoķci do kwadratu))
if(Vec2DDistanceSq(m_pPath->CurrentWaypoint(), m_pVehicle->Pos()) <
m_WaypointSeekDistSq)
{
m_pPath->SetNextWaypoint();
}
if (!m_pPath->Finished())
{
return Seek(m_pPath->CurrentWaypoint());
}
else
{
return Arrive(m_pPath->CurrentWaypoint(), normal);
}
}
Musisz byæ bardzo ostroŋny przy wdraŋaniu ķcieŋki. Zachowanie jest bardzo wraŋliwe na stosunek maksymalnej siģy kierowania / prędkoķci maksymalnej, a takŋe zmienną m_WaypointSeekDistSq. Plik wykonywalny demonstracji tego zachowania umoŋliwia zmianę tych wartoķci, aby zobaczyæ, jaki mają one efekt. Jak się przekonasz, ģatwo jest stworzyæ niechlujne zachowanie. To, jak wąska jest ķcieŋka, zaleŋy wyģącznie od ķrodowiska gry. Jeķli masz grę z wieloma ponurymi, ciasnymi korytarzami, (prawdopodobnie) będziesz potrzebowaæ surowszej ķcieŋki niŋ gra na Saharze.
Offset Pursuit
Funkcja przesunięcia oblicza siģę kierowania wymaganą do utrzymania pojazdu w pozycji okreķlonej odlegģoķci od pojazdu docelowego. Jest to szczególnie przydatne do tworzenia formacji. Podczas oglądania pokazów lotniczych, takich jak Brytyjskie Czerwone Strzaģki, wiele spektakularnych manewrów wymaga, aby drony pozostaģy w tych samych względnych pozycjach, co samoloty wiodące. Takie zachowanie chcemy naķladowaæ.
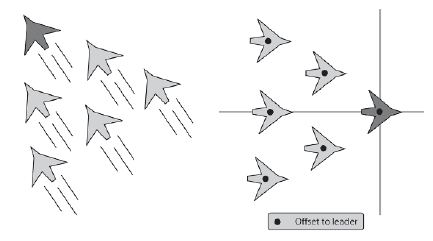 Przesunięcie jest zawsze definiowane w przestrzeni "lidera", więc pierwszą rzeczą do zrobienia przy obliczaniu tej siģy kierowania jest okreķlenie pozycji przesunięcia w przestrzeni ķwiata. Następnie funkcja przebiega podobnie do poķcigu: Przewiduje się przyszģą pozycję przesunięcia i pojazd dotrze do tej pozycji.
Przesunięcie jest zawsze definiowane w przestrzeni "lidera", więc pierwszą rzeczą do zrobienia przy obliczaniu tej siģy kierowania jest okreķlenie pozycji przesunięcia w przestrzeni ķwiata. Następnie funkcja przebiega podobnie do poķcigu: Przewiduje się przyszģą pozycję przesunięcia i pojazd dotrze do tej pozycji.
SVector2D SteeringBehaviors::OffsetPursuit(const Vehicle* leader,
const SVector2D offset)
{
// obliczyæ pozycję przesunięcia w przestrzeni ķwiata
SVector2D WorldOffsetPos = PointToWorldSpace(offset,
leader->Heading(),
leader->Side(),
leader->Pos());
SVector2D ToOffset = WorldOffsetPos - m_pVehicle->Pos();
// czas oczekiwania jest proporcjonalny do odlegģoķci między liderem a przeķladowcą;
// i jest odwrotnie proporcjonalny do sumy
// prędkoķci obu agentów
double LookAheadTime = ToOffset.Length() /
(m_pVehicle->MaxSpeed() + leader->Speed());
// teraz osiągnij przewidywaną przyszģą pozycję przesunięcia
return Arrive(WorldOffsetPos + leader->Velocity() * LookAheadTime, fast);
}
Przyjazd jest uŋywany zamiast poszukiwania, poniewaŋ zapewnia znacznie pģynniejszy ruch i nie jest tak zaleŋny od ustawieņ maksymalnej prędkoķci i siģy pojazdów. Poszukiwania mogą czasami dawaæ dziwne wyniki - uporządkowane formacje mogą zmieniæ się w rój pszczóģ atakujących lidera formacji!
Ķciganie offsetowe jest przydatne we wszystkich sytuacjach. Tu jest kilka:
• Oznaczanie przeciwnika w symulacji sportowej
• Dokowanie statkiem kosmicznym
• Cieniowanie samolotu
• Wdraŋanie formacji bojowych
Plik demonstracyjny wykonywany w ramach poķcigu pokazuje trzy mniejsze pojazdy próbujące pozostaæ w odsunięciu od większego pojazdu wiodącego. Wiodący pojazd korzysta z przybycia do podąŋania za celownikiem (kliknij lewym przyciskiem myszy, aby ustawiæ celownik).
Zachowania grupowe
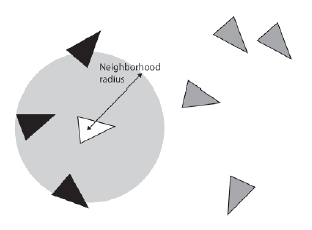
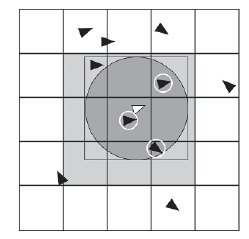
Zachowania grupowe to zachowania sterowania, które uwzględniają niektóre lub wszystkie inne pojazdy w ķwiecie gry. Uciekanie, opisane na początku, jest dobrym przykģadem zachowania grupowego. W rzeczywistoķci flokowanie jest kombinacją trzech zachowaņ grupowych - spójnoķci, separacji i dostosowania - wszystko to dziaģa razem. Niedģugo przyjrzymy się szczegóģowo tym konkretnym zachowaniom, ale najpierw pokaŋę ci, jak definiuje się grupę. Aby okreķliæ siģę sterującą dla zachowania grupowego, pojazd wežmie pod uwagę wszystkie inne pojazdy w obrębie okrągģego obszaru o z góry okreķlonym rozmiarze - znanym jako promieņ sąsiedztwa wyķrodkowany na poježdzie. Rysunek 3.15 powinien pomóc w wyjaķnieniu. Biaģy pojazd jest ķrodkiem kierującym, a szary okrąg pokazuje zasięg jego sąsiedztwa. W związku z tym wszystkie pojazdy pokazane na czarno są uwaŋane za sąsiadów, a pojazdy pokazane na szaro nie
Przed obliczeniem siģy kierowania naleŋy ustaliæ sąsiadów pojazdu i przechowywaæ je w pojemniku lub oznaczyæ jako gotowe do przetworzenia. W kodzie demonstracyjnym tego rozdziaģu sąsiednie pojazdy są oznaczone przy uŋyciu metody BaseGameEntity :: Tag. Odbywa się to za pomocą szablonu funkcji TagNeighbors. Oto kod:
template
void TagNeighbors(const T* entity, conT& ContainerOfEntities, double radius)
{
// teruj przez wszystkie byty sprawdzające zasięg
for (typename conT::iterator curEntity = ContainerOfEntities.begin();
curEntity != ContainerOfEntities.end();
++curEntity)
{
// najpierw wyczyķæ dowolny bieŋący tag
(*curEntity)->UnTag();
Vector2D to = (*curEntity)->Pos() - entity->Pos();
// promieņ ograniczający drugiego wzięto pod uwagę, dodając go
// do zakresu
double range = radius + (*curEntity)->BRadius();
// jeķli jednostka jest w zasięgu, oznacz do dalszego rozpatrzenia. (praca w
// przestrzeni z kwadratem odlegģoķci, aby uniknąæ sqrts)
if ( ((*curEntity) != entity) && (to.LengthSq() < range*range))
{
(*curEntity)->Tag();
}
}// następny byt
}
Większoķæ zachowaņ grupowych wykorzystuje podobny promieņ sąsiedztwa, więc moŋemy zaoszczędziæ trochę czasu, wywoģując tę metodę tylko raz przed wywoģaniem któregokolwiek z zachowaņ grupowych.
if (On(separation) || On(alignment) || On(cohesion))
{
TagNeighbors(m_pVehicle, m_pVehicle->World()->Agents(), ViewDistance);
}
WSKAZÓWKA Moŋesz nieco zwiększyæ realizm zachowaņ grupowych, dodając do swojego agenta ograniczenie pola widzenia. Na przykģad moŋesz ograniczyæ pojazdy znajdujące się w sąsiednim regionie, zaznaczając tylko te, które znajdują się, powiedzmy, 270 stopni w stosunku do kursu sterownika. Moŋesz to ģatwo wdroŋyæ, testując iloczynu skalarnego nagģówka agenta sterującego i wektora do potencjalnego sąsiada. Moŋliwe jest nawet dynamiczne dostosowanie pola widzenia agenta i wģączenie go do funkcji sztucznej inteligencji. Na przykģad w grze wojennej na pole widzenia ŋoģnierza moŋe niekorzystnie wpģywaæ jego zmęczenie, co wpģywa na jego zdolnoķæ postrzegania otoczenia. Nie sądzę, ŋe ten pomysģ zostaģ wykorzystany w grze komercyjnej, ale z pewnoķcią jest to przemyķlenie. Teraz, gdy wiesz, jak definiowana jest grupa, przyjrzyjmy się niektórym zachowaniom, które na nią dziaģają.
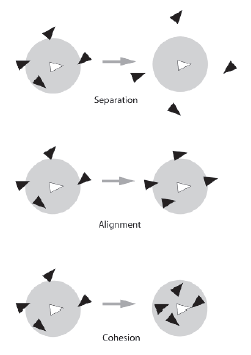
Separacja
Oddzielenie tworzy siģę, która kieruje pojazd z dala od znajdujących się w nim pojazdów regionu sąsiedztwa. Po zastosowaniu do wielu pojazdów, będą rozchodziæ się, próbując zmaksymalizowaæ odlegģoķæ od kaŋdego innego pojazdu.
Jest to ģatwe zachowanie do wdroŋenia. Przed wywoģaniem separacji wszyscy agenci znajdujący się w pobliŋu pojazdu są oznaczani. Separacja następnie iteruje oznaczone pojazdy, badając kaŋdy z nich. Wektor do kaŋdego rozwaŋanego pojazdu jest znormalizowany, podzielony przez odlegģoķæ do sąsiada i dodany do siģy kierowania.
Vector2D SteeringBehaviors::Separation(const std::vector
{
Vector2D SteeringForce;
for (int a=0; a
// upewnij się, ŋe ten agent nie jest uwzględniony w obliczeniach i ŋe
// agent sprawdzany jest wystarczająco blisko.
if((neighbors[a] != m_pVehicle) && neighbors[a]->IsTagged())
{
Vector2D ToAgent = m_pVehicle->Pos() - neighbors[a]->Pos();
// skalowaæ siģę odwrotnie proporcjonalną do odlegģoķci agenta
// od sąsiada.
SteeringForce += Vec2DNormalize(ToAgent)/ToAgent.Length();
}
}
return SteeringForce;
}
Wyrównanie
Wyrównanie próbuje utrzymaæ wyrównanie kursu pojazdu z sąsiadami. Patrz rysunek powyŋej, ķrodek. Siģa jest obliczana najpierw przez iterację przez wszystkich sąsiadów i uķrednienie ich wektorów kierunkowych. Ta wartoķæ to poŋądany kurs, więc odejmujemy kurs pojazdu, aby uzyskaæ siģę kierowania.
Vector2D SteeringBehaviors::Alignment(const std::vector
{
// uŋywane do rejestrowania ķredniego kursu sąsiadów
Vector2D AverageHeading;
// uŋywane do zliczania liczby pojazdów w okolicy
int NeighborCount = 0
// iteruj po wszystkich oznaczonych pojazdach i zsumuj ich wektor kursu
for (int a=0; a
// upewnij się, ŋe * ten * agent nie jest uwzględniony w obliczeniach i ŋe
// agent sprawdzany jest wystarczająco blisko
if((neighbors[a] != m_pVehicle) && neighbors[a]->IsTagged)
{
AverageHeading += neighbors[a]->Heading();
++NeighborCount;
}
}
// jeķli okolica zawiera jeden lub więcej pojazdów, uķrednij ich
// wektory nagģówkowe.
if (NeighborCount > 0)
{
AverageHeading /= (double)NeighborCount;
AverageHeading -= m_pVehicle->Heading();
}
return AverageHeading;
}
Samochody poruszające się po drogach wykazują zachowanie typu wyrównania. Wykazują takŋe separację, starając się zachowaæ minimalną odlegģoķæ od siebie.
Spójnoķæ
Kohezja wytwarza siģę kierującą, która porusza pojazd w kierunku ķrodka masy jego sąsiadów. Patrz rysunek powyŋej, u doģu. Owca biegająca za stadem wykazuje spójne zachowanie. Uŋyj tej siģy, aby utrzymaæ grupę pojazdów razem. Ta metoda przebiega podobnie do ostatniej, tyle ŋe tym razem obliczamy ķrednią wektorów pozycji sąsiadów. To daje nam ķrodek masy sąsiadów - miejsce, do którego pojazd chce się dostaæ - więc dąŋy do tej pozycji.
Vector2D SteeringBehaviors::Cohesion(const std::vector
{
// najpierw znajdž ķrodek masy wszystkich agentów
Vector2D CenterOfMass, SteeringForce;
int NeighborCount = 0;
// iteruj przez sąsiadów i podsumuj wszystkie wektory poģoŋenia
for (int a=0; a
// upewnij się, ŋe * ten * agent nie jest uwzględniony w obliczeniach i ŋe
// badany agent jest sąsiadem
if((neighbors[a] != m_pVehicle) && neighbors[a]->IsTagged())
{
CenterOfMass += neighbors[a]->Pos();
++NeighborCount;
}
}
if (NeighborCount > 0)
{
// ķrodek masy jest ķrednią sumy pozycji
CenterOfMass /= (double)NeighborCount;
// teraz szukaj w kierunku tej pozycji
SteeringForce = Seek(CenterOfMass);
}
return SteeringForce;
}
Moŋesz byæ trochę rozczarowany, ŋe nie uwzględniģem wersji demonstracyjnych dotyczących separacji, spójnoķci i dostosowania. Cóŋ, jest ku temu powód: podobnie jak Itchy i Scratchy, same w sobie nie są szczególnie interesujące; są one o wiele bardziej doceniane, gdy są poģączone, co przyjemnie przenosi nas do ucieczki.
Flokowanie
Flokowanie to zachowanie, o którym wspomniaģem na początku tej częķci - to, co widziaģem w dokumencie BBC. To piękna demonstracja tego, co staģo się znane jako zachowanie wschodzące. Wyģaniające się zachowanie to zachowanie, które wygląda na zģoŋone i / lub celowe dla obserwatora, ale w rzeczywistoķci pochodzi spontanicznie z doķæ prostych zasad. Podmioty niŋszego poziomu przestrzegające reguģ nie mają pojęcia o szerszym obrazie; są ķwiadomi tylko siebie i byæ moŋe kilku swoich sąsiadów. Dobrym przykģadem wschodu jest eksperyment przeprowadzony przez Chrisa Melhuisha i Owena Holland na University of the West of England. Melhuish i Holland są zainteresowani stygmatyzacją, dziedziną nauki częķciowo zajmującą się pojawiającymi się zachowaniami owadów spoģecznych, takich jak mrówki, termity i pszczoģy. Zainteresowali się sposobem, w jaki mrówki zbierają swoje martwe, jaja i inne materiaģy w stosy, a zwģaszcza mrówką Leptothorax, poniewaŋ ŋyje ona wķród pęknięæ w skaģach i dziaģa, we wszystkich celach i celach, w 2D
podobnie jak robot koģowy . Obserwując Leptothorax w laboratorium, krzątanie się w ich symulowanym pęknięciu - dwie tafle szkģa - zauwaŋyli, ŋe mrówki mają tendencję do spychania maģych granulek materiaģu skalnego w gromady i zastanawiali się, czy mogą zaprojektowaæ roboty zdolne do tego samego. Po odrobinie potu i trudu udaģo im się stworzyæ roboty dziaģające na bardzo prostych zasadach, zdolne do gromadzenia losowo rozrzuconych Frisbees w klastry. Roboty nie znaģy się nawzajem i nie wiedziaģy, co to jest gromada, a nawet Frisbee. Nie widzieli nawet Frisbees. Frisbee mogli popychaæ tylko za pomocą przedniego ramienia w ksztaģcie litery U. Jak więc zachowuje się klastrowanie? Cóŋ, kiedy roboty są wģączone, bģąkają się, aŋ wpadną na frisbee. Pojedynczy Frisbee nie zmienia zachowania robota. Jednak gdy robot Frisbeepushing wpada na drugiego Frisbee, natychmiast pozostawia dwa Frisbee tam, gdzie się znajdują, cofa się nieco, obraca o losową liczbę, a następnie ponownie odchodzi. Wykorzystując te proste zasady i trochę czasu, kilka robotów zepchnie wszystkie Frisbee do kilku duŋych gromad. Tak jak mrówki.
W kaŋdym razie pozwólcie, ŋe porzucę caģą tę rozmowę o Frisbees i wrócę do trzody. Flokowanie, jak pierwotnie opisaģ Reynolds, jest kombinacją trzech wczeķniej opisanych zachowaņ grupowych: separacja, wyrównanie i spójnoķæ. Dziaģa to dobrze, ale z powodu ograniczonej odlegģoķci widzenia pojazdu agent moŋe zostaæ odizolowany od stada. Jeķli tak się stanie, po prostu usiądzie i nic nie zrobi. Aby temu zapobiec, wolę równieŋ dodaæ zachowanie wędrówki. W ten sposób wszyscy agenci caģy czas się poruszają. Ulepszenie wielkoķci kaŋdego z zachowaņ przyczyni się do uzyskania róŋnych efektów, takich jak ģawice ryb, lužne wirujące stada ptaków lub tętniące ŋyciem stada owiec. Udaģo mi się nawet stworzyæ gęste stada setek drobnych cząstek przypominających meduzę. Poniewaŋ takie zachowanie jest lepiej widoczne niŋ opisane, polecam otworzyæ plik demo i chwilę się pobawiæ. Uwaga: uciekajcie, poniewaŋ uciekają! (Byæ moŋe dlatego niektóre zwierzęta tak bardzo to lubią
) Moŋesz dostosowaæ wpģyw kaŋdego zachowania za pomocą klawiszy "A / Z", "S / X" i "D / C". Ponadto moŋesz przeglądaæ sąsiadów jednego z agentów naciskając klawisz "G".
CIEKAWY FAKT. Zachowania sterujące są często wykorzystywane do tworzenia efektów specjalnych w filmach. Pierwszym filmem, w którym zastosowano zachowanie uciekające, byģ Powrót Batmana, w którym moŋna zobaczyæ stada nietoperzy i stada pingwinów. Najnowsze filmy przedstawiające zachowania kierownicze to trylogia Wģadca Pierķcieni w reŋyserii Petera Jacksona. Ruch armii orków w tych filmach jest tworzony za pomocą zachowaņ sterujących za pomocą oprogramowania o nazwie Massive. Teraz, gdy zobaczyģeķ zalety, przyjrzyjmy się dokģadnie, jak moŋna ģączyæ zachowania kierownicze.
Ģączenie zachowaņ sterujących
Często będziesz uŋywaæ kombinacji zachowaņ sterujących, aby uzyskaæ poŋądane zachowanie. Bardzo rzadko będziesz uŋywaæ tylko jednego zachowania w izolacji. Na przykģad, moŋesz chcieæ wdroŋyæ bota FPS, który będzie dziaģaģ od A do B (podąŋanie ķcieŋką), unikając innych botów (separacja) i ķcian (unikanie ķcian), które mogą próbowaæ utrudniæ jego postęp. Lub moŋesz chcieæ, aby owce, które zaimplementowaģeķ jako zasób pokarmowy w swojej grze RTS, gromadziģy się razem (flokowaģy), jednoczeķnie wędrując po otoczeniu (wędrując), unikając drzew (omijanie przeszkód) i rozpraszając (unikając) za kaŋdym razem, gdy czģowiek lub pies zbliŋa się. Wszystkie zachowania sterujące opisane tu są metodami jednej klasy: SteeringBehaviors. Pojazd posiada instancję tej klasy i aktywuje / dezaktywuje róŋne zachowania poprzez wģączanie i wyģączanie ich za pomocą metod akcesoriów. Na przykģad, aby ustawiæ jedną z owiec w sytuacji opisanej w poprzednim akapicie, moŋesz zrobiæ coķ takiego (zakģadając, ŋe agent podobny do psa zostaģ juŋ utworzony):
Vehicle* Sheep = new Vehicle();
Sheep->Steering()->SeparationOn();
Sheep->Steering()->AlignmentOn();
Sheep->Steering()->CohesionOn();
Sheep->Steering()->ObstacleAvoidanceOn();
Sheep->Steering()->WanderOn();
Sheep->Steering()->EvadeOn(Dog);
I odtąd owce będą się o siebie troszczyæ! (Byæ moŋe jednak będziesz musiaģ to ķcinaæ latem.)
UWAGA. Klasa SteeringBehaviors jest ogromna i zawiera znacznie więcej kodu, niŋ kiedykolwiek byģby uŋywany w jednym projekcie. Bardzo rzadko uŋywasz więcej niŋ kilku zachowaņ w kaŋdej projektowanej grze. Dlatego za kaŋdym razem, gdy uŋywam zachowaņ sterujących w póžniejszych rozdziaģach, będę uŋywaæ skróconej wersji klasy SteeringBehaviors, dostosowanej do konkretnego zadania. Sugeruję, abyķ zrobiģ to samo. (Innym podejķciem jest zdefiniowanie osobnej klasy dla kaŋdego zachowania i dodanie ich do std :: container wedģug potrzeb). Wewnątrz metody Vehicle :: Update zobaczysz następujący wiersz:
SVector2D SteeringForce = m_pSteering-> Calculate ();
To wywoģanie okreķla siģę wynikową ze wszystkich aktywnych zachowaņ. Nie jest to jednak suma wszystkich siģ kierujących. Nie zapominaj, ŋe pojazd jest ograniczony przez maksymalną siģę kierowania, więc ta suma musi zostaæ w jakiķ sposób obcięta, aby jego wielkoķæ nigdy nie przekroczyģa limitu. Moŋna to zrobiæ na wiele sposobów. Nie moŋna powiedzieæ, czy jedna metoda jest lepsza od innej, poniewaŋ zaleŋy to od tego, z jakimi zachowaniami musisz pracowaæ i jakie zasoby procesora musisz oszczędziæ. Wszystkie mają swoje zalety i wady. Zdecydowanie polecam eksperymentowaæ dla siebie.
Waŋona okrojona suma
Najprostszym podejķciem jest pomnoŋenie kaŋdego sposobu kierowania przez wagę, zsumowanie ich wszystkich razem, a następnie obcięcie wyniku do maksymalnej dopuszczalnej siģy kierowania. Lubię to:
SVector2D Calculate ()
{
SVector2D SteeringForce;
SteeringForce + = Wander () * dWanderAmount;
SteeringForce + = ObstacleAvoidance () * dObstacleAvoidanceAmount;
SteeringForce + = Separation () * dSeparationAmount;
zwraca SteeringForce.Truncate (MAX_STEERING_FORCE);
}
Moŋe to dziaģaæ dobrze, ale kompromis polega na tym, ŋe wiąŋe się z kilkoma problemami. Pierwszy problem polega na tym, ŋe poniewaŋ kaŋde aktywne zachowanie jest obliczane za kaŋdym razem, jest to bardzo kosztowna metoda przetwarzania. Dodatkowo, cięŋary zachowania mogą byæ bardzo trudne do dostosowania. (Czy mówiģem, ŋe jest trudny? Przepraszam, mam na myķli bardzo trudny!) Największy problem zdarza się jednak w przypadku sprzecznych siģ - częstym scenariuszem jest podpieranie pojazdu o ķcianę przez kilka innych pojazdów. W tym przykģadzie siģy oddzielające od sąsiednich pojazdów mogą byæ większe niŋ siģa odpychająca od ķciany, a pojazd moŋe ostatecznie zostaæ przepchnięty przez granicę ķciany. To prawie na pewno nie będzie korzystne. Jasne, ŋe moŋesz sprawiæ, by cięŋary unikania ķcian byģy ogromne, ale wtedy twój pojazd moŋe zachowywaæ się dziwnie następnym razem, gdy znajdzie się sam i przy ķcianie. Jak juŋ wspomniaģem, poprawianie parametrów waŋonej sumy moŋe byæ doķæ ŋonglerką!
Waŋona obcięta suma bieŋąca z ustalaniem priorytetów
Co za kęs! Jest to metoda stosowana do okreķlenia siģ sterujących dla wszystkich przykģadów uŋytych tu, wybrana gģównie dlatego, ŋe daje dobry kompromis między prędkoķcią a dokģadnoķcią. Metoda ta polega na obliczeniu waŋonej sumy caģkowitej waŋonej, która jest obcinana po dodaniu kaŋdej siģy, aby upewniæ się, ŋe wielkoķæ siģy kierującej nie przekracza maksymalnej dostępnej. Priorytetem są zachowania kierownicze, poniewaŋ niektóre zachowania moŋna uznaæ za znacznie waŋniejsze od innych. Powiedzmy, ŋe pojazd wykorzystuje separację zachowaņ, wyrównanie, spójnoķæ, unikanie ķcian i omijanie przeszkód. Unikanie ķcian i zachowania związane z unikaniem przeszkód powinny mieæ pierwszeņstwo przed innymi, poniewaŋ pojazd powinien staraæ się nie przecinaæ ķciany ani przeszkody - waŋniejsze jest, aby pojazd unikaģ ķciany niŋ zrównanie się z innym pojazdem. Jeķli to, czego potrzeba, aby ominąæ ķcianę, to wyrównanie higgledy-piggledy, to prawdopodobnie będzie dobrze i z pewnoķcią lepsze niŋ kolizja ze ķcianą. Waŋniejsze jest równieŋ, aby pojazdy zachowaģy pewną odlegģoķæ od siebie niŋ wyrównanie. Ale prawdopodobnie mniej waŋne jest, aby pojazdy utrzymywaģy separację niŋ omijaģy ķciany. Widzisz, gdzie idę z tym? Kaŋde zachowanie jest traktowane priorytetowo i przetwarzane w kolejnoķci. Zachowania o najwyŋszym priorytecie są przetwarzane jako pierwsze, te o najniŋszym, ostatnie.
Oprócz ustalania priorytetów, ta metoda dokonuje iteracji przez kaŋde aktywne zachowanie, sumując siģy (wraz z waŋeniem) w miarę upģywu czasu. Natychmiast po obliczeniu kaŋdego nowego zachowania siģa wypadkowa wraz z sumą bieŋącą jest wysyģana do metody o nazwie AccumulateForce. Ta funkcja okreķla najpierw pozostaģą częķæ maksymalnej dostępnej siģy kierowania, a następnie następuje jedna z następujących czynnoķci:
• Jeķli pozostaģa nadwyŋka, nowa siģa jest dodawana do bieŋącej sumy.
• Jeķli nie ma juŋ nadwyŋki, metoda zwraca false. Gdy tak się stanie, funkcja Calculate natychmiast zwraca bieŋącą wartoķæ parametru m_vSteeringForce i nie bierze pod uwagę ŋadnych dalszych aktywnych zachowaņ.
• Jeķli nadal dostępna jest pewna siģa kierująca, ale pozostaģa wielkoķæ jest mniejsza niŋ wielkoķæ nowej siģy, nowa siģa zostaje obcięta do pozostaģej wielkoķci przed jej dodaniem.
Oto fragment kodu z metody SteeringBehaviors :: Calculate, aby pomóc Ci lepiej zrozumieæ, o czym mówię.
SVector2D SteeringBehaviors::Calculate()
{
// zresetuj siģę.
m_vSteeringForce.Zero();
SVector2D force;
if (On(wall_avoidance))
{
force = WallAvoidance(m_pVehicle->World()->Walls()) *
m_dMultWallAvoidance;
if (!AccumulateForce(m_vSteeringForce, force)) return m_vSteeringForce;
}
if (On(obstacle_avoidance))
{
force = ObstacleAvoidance(m_pVehicle->World()->Obstacles()) *
m_dMultObstacleAvoidance;
if (!AccumulateForce(m_vSteeringForce, force)) return m_vSteeringForce;
}
if (On(separation))
{
force = Separation(m_pVehicle->World()->Agents()) *
m_dMultSeparation;
if (!AccumulateForce(m_vSteeringForce, force)) return m_vSteeringForce;
}
/* EXTRANEOUS STEERING FORCES OMITTED */
return m_vSteeringForce;
}
Nie pokazuje to wszystkich siģ kierujących, tylko kilka, dzięki czemu moŋna uzyskaæ ogólny pomysģ. Aby zobaczyæ listę wszystkich zachowaņ i ich kolejnoķæ ustalanie priorytetów, sprawdž metodę SteeringBehaviors :: Calculate w swoim IDE. Metodę AccumulateForce moŋna równieŋ lepiej wyjaķniæ w kodzie. Nie spiesz się, przeglądając tę metodę i upewnij się, ŋe rozumiesz, co ona robi.
bool SteeringBehaviors::AccumulateForce(Vector2D &RunningTot,
Vector2D ForceToAdd)
{
// obliczyæ, ile siģy kierującej zuŋyģ dotychczas pojazd
double MagnitudeSoFar = RunningTot.Length();
// obliczyæ, ile siģy kierującej ma zuŋyæ ten pojazd
double MagnitudeRemaining = m_pVehicle->MaxForce() - MagnitudeSoFar;
// zwraca false, jeķli nie ma juŋ siģy, aby uŋyæ
if (MagnitudeRemaining <= 0.0) return false;
// oblicz wielkoķæ siģy, którą chcemy dodaæ
double MagnitudeToAdd = ForceToAdd.Length();
// jeķli wielkoķæ sumy ForceToAdd i bieŋącej sumy
// nie przekracza maksymalnej siģy dostępnej dla tego pojazdu, tylko
// dodaæ razem. W przeciwnym razie dodaj tyle wektora ForceToAdd, ile
// moŋliwe bez przekraczania maks.
if (MagnitudeToAdd < MagnitudeRemaining)
{
RunningTot += ForceToAdd;
}
else
{
// dodaj go do siģy kierowania
RunningTot += (Vec2DNormalize(ForceToAdd) * MagnitudeRemaining);
}
return true;
}
Dithering z priorytetem
W swoim artykule Reynolds sugeruje metodę kombinacji siģ, którą nazywa priorytetem ditheringu. Gdy jest uŋywana, ta metoda sprawdza, czy zachowanie pierwszego priorytetu będzie oceniane na tym etapie symulacji, w zaleŋnoķci od ustalonego prawdopodobieņstwa. Jeķli tak, a wynik jest niezerowy, metoda zwraca obliczoną siģę i nie są brane pod uwagę inne aktywne zachowania. Jeķli wynik wynosi zero lub jeķli zachowanie to zostaģo pominięte ze względu na prawdopodobieņstwo jego oceny, rozwaŋane jest zachowanie o kolejnym priorytecie i tak dalej, dla wszystkich aktywnych zachowaņ. To jest maģy fragment kodu, który pomoŋe ci zrozumieæ tę koncepcję:
SVector2D SteeringBehaviors::CalculateDithered()
{
// zresetowaæ siģę kierowania
m_vSteeringForce.Zero();
// prawdopodobieņstwa zachowania
const double prWallAvoidance = 0.9;
const double prObstacleAvoidance = 0.9;
const double prSeparation = 0.8;
const double prAlignment = 0.5;
const double prCohesion = 0.5;
const double prWander = 0.8;
if (On(wall_avoidance) && RandFloat() > prWallAvoidance)
{
m_vSteeringForce = WallAvoidance(m_pVehicle->World()->Walls()) *
m_dWeightWallAvoidance / prWallAvoidance;
if (!m_vSteeringForce.IsZero())
{
m_vSteeringForce.Truncate(m_pVehicle->MaxForce());
return m_vSteeringForce;
}
}
if (On(obstacle_avoidance) && RandFloat() > prObstacleAvoidance)
{
m_vSteeringForce += ObstacleAvoidance(m_pVehicle->World()->Obstacles()) *
m_dWeightObstacleAvoidance / prObstacleAvoidance;
if (!m_vSteeringForce.IsZero())
{
m_vSteeringForce.Truncate(m_pVehicle->MaxForce());
return m_vSteeringForce;
}
}
if (On(separation) && RandFloat() > prSeparation)
{
m_vSteeringForce += Separation(m_pVehicle->World()->Agents()) *
m_dWeightSeparation / prSeparation;
if (!m_vSteeringForce.IsZero())
{
m_vSteeringForce.Truncate(m_pVehicle->MaxForce());
return m_vSteeringForce;
}
}
/* ETC ETC */
Ta metoda wymaga znacznie mniej czasu procesora niŋ inne, ale kosztem dokģadnoķci. Ponadto będziesz musiaģ nieco zwiększyæ prawdopodobieņstwo, zanim uzyskasz takie zachowanie, jakie chcesz. Niemniej jednak, jeķli masz maģo zasobów i nie jest konieczne, aby ruchy twojego agenta byģy precyzyjne, z pewnoķcią warto eksperymentowaæ z tą metodą. Moŋesz zobaczyæ efekt kaŋdej z trzech opisanych przeze mnie metod sumowania, uruchamiając wersję demonstracyjną Big Shoal / Big Shoal.exe. Ta demonstracja pokazuje, ŋe ģawica 300 maģych pojazdów (myķlę, ŋe ryby) jest nieufna wobec jednego większego pojazdu wędrownego (myķlę, ŋe rekin). Moŋesz przeģączaæ się między róŋnymi metodami sumowania, aby zaobserwowaæ, jak wpģywają one na częstotliwoķæ klatek i dokģadnoķæ zachowaņ. Moŋesz takŋe dodaæ ķciany lub przeszkody do otoczenia, aby zobaczyæ, jak dziaģają agenci uŋywający róŋnych metod sumowania.
Zapewnienie zerowego nakģadania się
Często podczas ģączenia zachowaņ pojazdy czasami nakģadają się na siebie. Sama siģa sterująca separacją nie jest wystarczająca, aby temu zapobiec. Przez większoķæ czasu jest to w porządku - niewielkie nakģadanie się zostanie niezauwaŋone przez gracza - ale czasami konieczne jest upewnienie się, ŋe cokolwiek się stanie, pojazdy nie będą mogģy przejeŋdŋaæ przez promienie ograniczające się nawzajem. Moŋna temu zapobiec za pomocą ograniczenia niepenetrującego. Jest to funkcja testująca nakģadanie się. Jeķli takie istnieją, pojazdy są odsunięte od siebie w kierunku od punktu styku (bez względu na ich masę, prędkoķæ lub inne fizyczne ograniczenia).
Ograniczenie jest zaimplementowane jako szablon funkcji i moŋe byæ uŋywane dla dowolnych obiektów pochodzących z BaseGameEntity. Moŋesz znaležæ kod w nagģówku EntityFunctionTemplates.h i wygląda to tak:
template
void EnforceNonPenetrationConstraint(const T& entity,
const conT& ContainerOfEntities)
{
// iteruj przez wszystkie jednostki, sprawdzając, czy zachodzą na siebie promienie ograniczające
for (typename conT::const_iterator curEntity =ContainerOfEntities.begin();
curEntity != ContainerOfEntities.end();
++curEntity)
{
// upewnij się, ŋe nie sprawdzimy w stosunku do danej osoby
if (*curEntity == entity) continue;
// obliczyæ odlegģoķæ między pozycjami jednostek
Vector2D ToEntity = entity->Pos() - (*curEntity)->Pos();
double DistFromEachOther = ToEntity.Length();
// jeķli ta odlegģoķæ jest mniejsza niŋ suma ich promieni, to ta
// jednostka musi zostaæ odsunięta w kierunku równolegģym do
// Wektor ToEntity
double AmountOfOverLap = (*curEntity)->BRadius() + entity->BRadius() -
DistFromEachOther;
if (AmountOfOverLap >= 0)
{
// odsuņ byt na odlegģoķæ równą odlegģoķci nakģadania się.
entity->SetPos(entity->Pos() + (ToEntity/DistFromEachOther) *
AmountOfOverLap);
}
}// następny byt
}
Moŋesz obserwowaæ dziaģanie ograniczenia penetracji w akcji, uruchamiając sztucznie nazwaną wersję demonstracyjną Non Penetration Constraint.exe. Spróbuj zmieniæ iloķæ separacji, aby zobaczyæ, jaki ma to wpģyw na pojazdy.
UWAGA .W przypadku duŋej liczby gęsto upakowanych pojazdów, takich jak w duŋych zatģoczonych stadach, ograniczenie braku penetracji czasami się nie powiedzie i będzie się nakģadaæ. Na szczęķcie nie stanowi to zwykle problemu, poniewaŋ nakģadanie się jest trudne do dostrzeŋenia ludzkim okiem.
Radzenie sobie z duŋą iloķcią pojazdów: partycjonowanie przestrzenne
Kiedy masz wiele wspóģdziaģających pojazdów, coraz bardziej nieefektywne jest oznaczanie sąsiednich bytów poprzez porównywanie ich ze sobą. W teorii algorytmów coķ, co nazywa się notacją Big O, sģuŋy do wyraŋenia związku czasu potrzebnego do liczby przetwarzanych obiektów. Moŋna powiedzieæ, ŋe metoda wszystkich par, której uŋywamy do wyszukiwania sąsiednich pojazdów, dziaģa w czasie O (n2). Oznacza to, ŋe wraz ze wzrostem liczby pojazdów czas potrzebny do ich porównania roķnie proporcjonalnie do kwadratu ich liczby. Moŋesz ģatwo zobaczyæ, jak szybko ten czas się eskaluje. Jeķli przetworzenie jednego obiektu zajmie 10 sekund, wówczas przetworzenie 10 obiektów zajmie 100 sekund. Nie dobrze, jeķli chcesz stada kilkuset ptaków! Moŋna dokonaæ duŋych ulepszeņ prędkoķci, dzieląc przestrzeņ ķwiata. Istnieje wiele róŋnych technik do wyboru. Prawdopodobnie sģyszaģeķ o wielu z nich - drzewach BSP, poczwórnych, oķmiornicach itp. - a moŋe nawet z nich korzystaģeķ, w takim przypadku zapoznasz się z ich zaletami. Metodę, której tu uŋywam, nazywa się partycjonowaniem przestrzeni komórkowej, czasem nazywaną partycjonowaniem przestrzeni bin (tak przy okazji, to nie jest skrótem do partycjonowania przestrzeni binarnej; w tym przypadku "bin" naprawdę oznacza bin). Dzięki tej metodzie przestrzeņ 2D jest dzielona na kilka komórek (lub pojemników). Kaŋda komórka zawiera listę wskažników do wszystkich zawartych w niej encji. Jest aktualizowany (w metodzie aktualizacji jednostki) za kaŋdym razem, gdy jednostka zmienia pozycję. Jeķli jednostka przenosi się do nowej komórki, jest usuwana z listy starej komórki i dodawana do bieŋącej. W ten sposób, zamiast koniecznoķci testowania kaŋdego pojazdu względem siebie, moŋemy po prostu ustaliæ, które komórki leŋą w sąsiedztwie pojazdu i przetestowaæ pojazdy znajdujące się w tych komórkach. Oto jak to zrobiæ krok po kroku:
1. Po pierwsze, promieņ ograniczający jednostki jest przybliŋany za pomocą ramki.
2. Komórki przecinające się z tym polem są testowane, aby sprawdziæ, czy zawierają jakiekolwiek elementy.
3. Wszystkie byty zawarte w komórkach z kroku 2 są badane, aby sprawdziæ, czy znajdują się w promieniu sąsiedztwa. Jeķli tak, są dodawane do listy okolic.
UWAGA. Jeķli pracujesz w 3D, po prostu utwórz kostki komórek i uŋyj kuli jako regionu sąsiedztwa.
Jeķli jednostki utrzymują minimalną odlegģoķæ od siebie, to liczba jednostek, które kaŋda komórka moŋe zawieraæ, jest skoņczona, a podziaģ przestrzeni komórki będzie dziaģaģ w czasie O (n). Oznacza to, ŋe czas potrzebny na przetworzenie algorytmu jest wprost proporcjonalny do liczby obiektów, na których dziaģa. Jeķli liczba obiektów jest podwojona, czas jest podwojony i nie jest zwiększany do kwadratu, jak w przypadku algorytmów O (n2). Oznacza to, ŋe korzyķæ, jaką zyskujesz dzięki partycjonowaniu przestrzeni w porównaniu ze standardową techniką wszystkich par, zaleŋy od liczby agentów, których poruszasz się. W przypadku maģych liczb, powiedzmy mniej niŋ pięædziesiąt, nie ma prawdziwej przewagi; ale w przypadku duŋych liczb partycjonowanie w przestrzeni komórkowej moŋe byæ znacznie szybsze. Nawet jeķli jednostki nie utrzymują minimalnej odlegģoķci separacji i czasami dochodzi do nakģadania się, ķrednio algorytm będzie dziaģaģ znacznie lepiej niŋ O (n2). Zaimplementowaģem partycjonowanie przestrzeni komórkowej jako szablon klasy: CellSpacePartition. Ta klasa uŋywa innego szablonu klasy, Komórka, do zdefiniowania struktury komórki.
template
struct Cell
{
// wszystkie byty zamieszkujące tę komórkę
std::list
// obwiednia komórki (jest odwrócona, poniewaŋ domyķlna
systemu Windows
// ukģad wspóģrzędnych ma oķ y, która roķnie w miarę opadania)
InvertedAABBox2D BBox;
Cell(Vector2D topleft,
Vector2D botright):BBox(InvertedAABBox2D(topleft, botright))
{}
};
Cell jest bardzo prostą strukturą. Zawiera instancję klasy ramki ograniczającej, która okreķla jej zakres, oraz listę wskažników dla wszystkich tych jednostek, które znajdują się w tym obszarze ograniczającym. Definicja klasy CellSpacePartition jest następująca:
emplate
class CellSpacePartition
{
private:
//wymagana liczba komórek w przestrzeni
std::vector
// sģuŋy to do przechowywania waŋnych sąsiadów, gdy agent wyszukuje
// jego sąsiednia przestrzeņ
std::vector
// ten iterator zostanie uŋyty przez n
std::vector
//szerokoķæ i wysokoķæ przestrzeni ķwiata, w której ŋyją byty
double m_dSpaceWidth;
double m_dSpaceHeight;
//liczba komórek, na które ma zostaæ podzielona przestrzeņ
int m_iNumCellsX;
int m_iNumCellsY;
double m_dCellSizeX;
double m_dCellSizeY;
// biorąc pod uwagę pozycję w obszarze gry, ta metoda okreķla
// odpowiedni indeks komórki
inline int PositionToIndex(const Vector2D& pos)const;
public:
CellSpacePartition(double width, // szerokoķæ ķrodowiska
double height, // wysokoķæ …
int cellsX, // liczba komórek w poziomie
int cellsY, // liczba komórek w pionie
int MaxEntitys); // maksymalna liczba podmiotów do dodania
// dodaje jednostki do klasy, przydzielając je do odpowiedniej komórki
inline void AddEntity(const entity& ent);
// zaktualizuj komórkę jednostki, wywoģując ją z metody Update swojej jednostki
inline void UpdateEntity(const entity& ent, Vector2D OldPos);
// ta metoda oblicza wszystkich sąsiadów celu i przechowuje je w
// wektor sąsiada. Po wywoģaniu tej metody uŋyj przycisku begin,
// next i zakoņcz metody iteracji po wektorze.
inline void CalculateNeighbors(Vector2D TargetPos, double QueryRadius);
// zwraca odwoģanie do encji z przodu wektora sąsiada
inline entity& begin();
// zwraca to następny byt w wektorze sąsiednim
inline entity& next();
// zwraca true, jeķli znaleziono koniec wektora (zerowa wartoķæ oznacza koniec)
inline bool end();
// opróŋnia komórki bytów
void EmptyCells();
};
Klasa inicjuje m_Neighbors, aby mieæ maksymalny rozmiar równy caģkowitej liczbie bytów na ķwiecie. Metody iteratora rozpoczynają się, koņczą i koņczą, a metoda CalculateNeighbors ręcznie ķledzi prawidģowe elementy wewnątrz tego wektora. Zapobiega to spowolnieniu związanemu z kosztami alokacji pamięci i delokalizacji wielokrotnego wywoģywania std :: vector :: clear () i std :: vector :: push_back () wiele razy na sekundę. Zamiast tego poprzednie wartoķci są po prostu nadpisywane, a wartoķæ zerowa sģuŋy do oznaczenia koņca wektora. Oto lista metod CalculateNeighbors. Zwróæ uwagę, w jaki sposób postępuje zgodnie z krokami opisanymi wczeķniej, aby okreķliæ sąsiadów pojazdu.
template
void CellSpacePartition
double QueryRadius)
{
// utwórz iterator i ustaw go na początku listy sąsiadów
std::list
// utwórz pole zapytania, które jest ramką graniczną zapytania celu
//powierzchnia
InvertedAABBox2D QueryBox(TargetPos - Vector2D(QueryRadius, QueryRadius),
TargetPos + Vector2D(QueryRadius, QueryRadius));
// iteruj po kaŋdej komórce i sprawdž, czy jej obwiednia się pokrywa
// z polem zapytania. Jeķli tak, a takŋe zawiera byty, to
// wykonaj dalsze testy zbliŋeniowe.
std::vector
for (curCell=m_Cells.begin(); curCell!=m_Cells.end(); ++curCell)
{
// przetestuj, czy ta komórka zawiera elementy i czy pokrywa się z
// pole zapytania
if (curCell->pBBox->isOverlappedWith(QueryBox) &&
!curCell->Members.empty())
{
// dodaj wszelkie jednostki znalezione w promieniu zapytania do listy sąsiadów
std::list
for (it; it!=curCell->Members.end(); ++it)
{
if (Vec2DDistanceSq((*it)->Pos(), TargetPos) <
QueryRadius*QueryRadius)
{
*curNbor++ = *it;
}
}
}
}// następna komórka
// zaznacz koniec listy zerem.
*curNbor = 0;
}
CellSpacePartition.h. Dodaģem partycjonowanie przestrzeni komórkowej do wersji demo Big_Shoal.exe. Teraz nazywa się Another_Big_Shoal.exe. Moŋesz wģączaæ i wyģączaæ partycjonowanie i zobaczyæ róŋnicę, jaką robi to dla liczby klatek na sekundę. Istnieje równieŋ opcja podglądu podziaģu przestrzeni (domyķlnie jest to 7 x 7 komórek) oraz pola zapytania i promienia sąsiedztwa jednego z agentów.
WSKAZÓWKA. Podczas przykģadania siģy kierowania do niektórych typów pojazdów przydatne moŋe byæ rozdzielenie wektora kierowania na częķci przednie i boczne. Na przykģad w przypadku samochodu byģoby to analogiczne do wytworzenia odpowiednio przepustnicy i siģ kierujących
Wygģadzanie
Podczas gry z wersjami demonstracyjnymi moŋesz zauwaŋyæ, ŋe czasami pojazd moŋe lekko drgaæ lub drgaæ, gdy znajdzie się w sytuacji, w której występują sprzeczne reakcje róŋnych zachowaņ. Na przykģad, jeķli uruchomisz jedną z wersji Big Shoal i wģączysz przeszkody i ķciany, zobaczysz, ŋe czasami, gdy agent "rekina" zbliŋy się do ķciany lub przeszkody, nos drŋy lub drŋy. Wynika to z tego, ŋe w jednym kroku aktualizacji zachowanie polegające na unikaniu przeszkód przywraca siģę kierującą od przeszkody, ale w następnym kroku aktualizacji nie ma zagroŋenia z powodu przeszkody, więc jednym z innych aktywnych zachowaņ agenta mogą przywróciæ siģę kierującą, pociągając jego kurs z powrotem w kierunku przeszkody i tak dalej, powodując niepoŋądane oscylacje w kierunku pojazdu. Rysunek poniŋszy pokazuje, jak moŋna rozpocząæ te oscylacje za pomocą tylko dwóch sprzecznych zachowaņ: unikania przeszkód i poszukiwania.
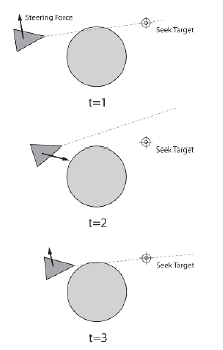
Ta drŋenie zwykle nie jest zbyt zauwaŋalne. Czasami jednak zdarza się, ŋe lepiej będzie, gdy wstrząsanie nie nastąpi. Jak to zatrzymaæ? Poniewaŋ prędkoķæ pojazdu jest zawsze zgodna z jego kierunkiem, zatrzymanie wstrząsów nie jest trywialne. Aby pomyķlnie i bezproblemowo negocjowaæ scenariusz przedstawiony na powyŋszym rysunku, pojazd musi byæ w stanie przewidzieæ konflikt z wyprzedzeniem i odpowiednio zmieniæ zachowanie. Chociaŋ moŋna to zrobiæ, rozwiązanie moŋe wymagaæ wielu obliczeņ i dodatkowego bagaŋu. Prostą alternatywą sugerowaną przez Robina Greena z Sony jest oddzielenie kursu od wektora prędkoķci i uķrednienie jego wartoķci w kilku krokach aktualizacji. Chociaŋ to rozwiązanie nie jest idealne, daje odpowiednie wyniki przy niskim koszcie (w porównaniu do kaŋdego innego rozwiązania, które znam o). Aby to uģatwiæ, do klasy Vehicle dodaje się inną zmienną skģadową: m_vSmoothedHeading. Ten wektor rejestruje ķrednią wektora kursu pojazdu i jest aktualizowany na kaŋdym etapie symulacji (w Vehicle :: Update), wykorzystując wywoģanie do instancji Smoother - klasy, która pobiera próbkę wartoķci z zakresu i zwraca ķrednią. Tak wygląda poģączenie:
if (SmoothingIsOn())
{
m_vSmoothedHeading = m_pHeadingSmoother->Update(Heading());
}
Ten wygģadzony wektor kursowy jest uŋywany przez funkcję transformacji ķwiata w wywoģaniu renderowania do przeksztaģcania wierzchoģków pojazdu w ekran. Liczba kroków aktualizacji, których uŋywa Smoother do obliczenia ķredniej, jest ustawiona w params.ini i jest przypisana do zmiennej NumSamplesForSmoothing
Dostosowując tę wartoķæ, naleŋy staraæ się utrzymywaæ ją na moŋliwie najniŋszym poziomie, aby uniknąæ niepotrzebnych obliczeņ i zuŋycia pamięci. Uŋywanie bardzo wysokich wartoķci powoduje dziwne zachowanie. Spróbuj uŋyæ wartoķci 100 dla NumSamplesForSmoothing, a zobaczysz, co mam na myķli. Przypomina mi cytat z Poradnika Autostopowicza po Galaktyce:
"Wiesz," powiedziaģ Arthur z lekkim kaszlem, "jeķli to Southend, jest w tym coķ dziwnego
" "Masz na myķli sposób, w jaki morze pozostaje stabilne, a budynki ciągle się umywają?", Powiedziaģ Ford. "Tak, myķlaģem, ŋe to równieŋ dziwne." Moŋesz zobaczyæ róŋnicę wygģadzania, jeķli uruchomisz plik Another_Big_Shoal z plikiem wygģadzającym.
Praktyka czyni mistrza
W swoim artykule "Zachowania sterujące dla postaci autonomicznych" Reynolds opisuje zachowanie zwane liderem. Podąŋanie za liderem to zachowanie, które tworzy siģę kierującą, która utrzymuje wiele pojazdów w ruchu w jednym pliku za pojazdem lidera. Jeķli kiedykolwiek widziaģeķ, jak pisklęta gęsie podąŋają za ich matką, będziesz wiedziaģ, co mam na myķli. Aby stworzyæ tego rodzaju zachowanie, obserwujący muszą dojķæ do pozycji przesuniętej za pojazdem z przodu, uŋywając separacji, aby pozostaæ oddzielone od siebie.
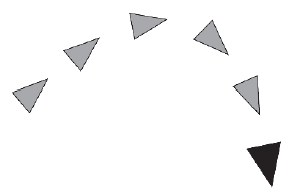
Podąŋanie za liderem moŋna jeszcze ulepszyæ, tworząc zachowanie, które kieruje pojazd w bok od lidera, jeķli znajdzie się na ķcieŋce lidera. Utwórz grupę 20 pojazdów, które zachowują się jak stado owiec. Teraz dodaj pojazd kontrolowany przez uŋytkownika, którym moŋesz sterowaæ za pomocą klawiatury. Zaprogramuj swoje owce, aby wierzyģy, ŋe pojazd to pies. Czy potrafisz sprawiæ, by zachowanie stada wyglądaģo realistycznie?