Raven : Omówienie
Tu znajdziesz przegląd gry o nazwie Raven. Raven zostanie wykorzystany jako ramy, w których zostaną zaimplementowane wszystkie pozostaģe techniki (oprócz większoķci tych, których juŋ się nauczyģeķ). Najpierw poķwięcisz trochę czasu na zapoznanie się z architekturą gry, a następnie podsumowanie elementów tworzących sztuczną inteligencję.
Gra
Raven to proste, ale zģoŋone ķrodowisko gry 2D wystarczająco, aby odpowiednio zademonstrowaæ techniki opisane przez nas. Typowa mapa Ravena skģada się z szeregu pokoi i korytarzy, kilku punktów odradzania, z których generowane są agenty ("boty") oraz przedmiotów, takich jak pakiety zdrowia lub broņ, które boty mogą podnieķæ i uŋyæ.
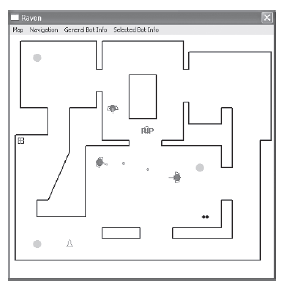
Rozgrywka jest podobna do deathmatchu w stylu Quake. Rozpoczynając grę, odradza się kilka botów kontrolowanych przez AI, które biegają po mapie, próbując wykonaæ jak najwięcej zabójstw i zbierając broņ i zdrowie w razie potrzeby. Jeķli bot zostanie zabity, natychmiast odradza się z peģnym zdrowiem z losowego punktu odradzania, a pozycja, w której zostaģ zabity, jest oznaczona "grobem" na kilka sekund. Bota moŋna wybraæ, klikając go prawym przyciskiem myszy. Po wybraniu wokóģ bota zostanie narysowane czerwone kóģko, a na ekranie zostaną wyķwietlone dodatkowe informacje związane ze sztuczną inteligencją, w zaleŋnoķci od opcji ustawionych w menu. Kliknij wybranego bota prawym przyciskiem myszy, a będziesz go "posiadaģ" - będzie on pod twoją kontrolą. Opętany robot jest otoczony niebieskim kolorem i moŋna go przenieķæ, klikając prawym przyciskiem myszy tę częķæ mapy, do której ma się udaæ. AI nawigacji bota automatycznie zapewni pomoc, planując najkrótszą drogę do wybranej lokalizacji. Celem bota kontroluje mysz. Poniewaŋ bot moŋe celowaæ niezaleŋnie od swojego kierunku ruchu, opętany bot zawsze będzie zwrócony w kierunku kursora myszy. Kliknięcie lewym przyciskiem spowoduje wystrzelenie bieŋącej broni bota w kierunku kursora myszy. (W przypadku broni dystansowej, takiej jak wyrzutnia rakiet, celem jest pozycja kursora.) Moŋesz zmieniæ broņ (pod warunkiem, ŋe bot ma więcej niŋ jedną), naciskając klawisze "1" na "4". Bot jest zwalniany z twojej kontroli przez kliknięcie prawym przyciskiem myszy innego bota lub przez naciķnięcie klawisza "X".
UWAGA. Chociaŋ podczas gry moŋesz wyražnie zobaczyæ wszystkie inne boty, sztuczna inteligencja kaŋdego bota jest w stanie zobaczyæ tylko te boty, które znajdują się w jego polu widzenia i nie są zasģonięte przez ķciany. To sprawia, ŋe konstrukcja AI jest znacznie bardziej interesująca.
Przegląd architektury gry
W tej sekcji przeanalizujemy kluczowe klasy, które skģadają się na ķrodowisko gry. Rysunek pokazuje przegląd wzajemnych zaleŋnoķci między obiektami wysokiego poziomu.
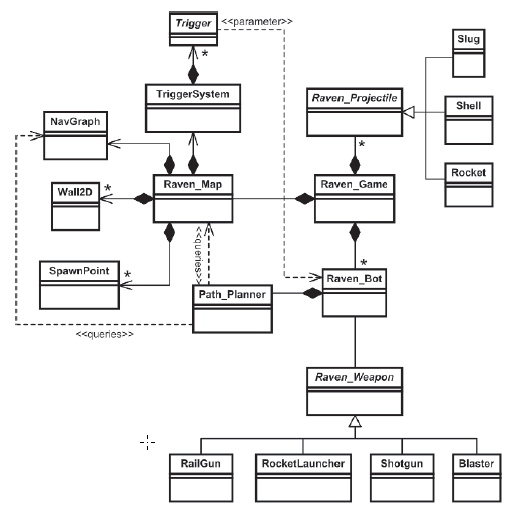
Klasa Raven_Game
Klasa Raven_Game jest centrum projektu. Ta klasa posiada instancję Raven_Map, pojemnik botów i pojemnik wszelkich aktywnych pocisków (rakiety, ķlimaki itp.). Między innymi klasa Raven_Game ma metody ģadowania map i powiązanych z nimi wykresów nawigacyjnych, aktualizowania i renderowania elementów gry i geometrii, wysyģania zapytaņ do ķwiata za pomocą ŋądaņ widocznoķci oraz obsģugi danych wejķciowych uŋytkownika. Poniŋej znajduje się częķciowa lista deklaracji klasy Raven_Game. Rzuæ okiem, aby się z tym zapoznaæ.
class Raven_Game
{
private:
Raven_Map* m_pMap;
std::list
// uŋytkownik moŋe wybraæ bota do sterowania ręcznego. Ten czģonek
// trzyma wskažnik do tego bota
Raven_Bot* m_pSelectedBot;
// ta lista zawiera wszystkie aktywne pociski (ķlimaki, rakiety,
// ķrutówki itp.)
std::list
/* WYJĄTKOWO SZCZEGÓĢOWE POMINIĘCIE DLA JASNOĶCI */
public:
// Podejrzani
void Render();
void Update();
// ģaduje ķrodowisko z pliku
bool LoadMap(const std::string& FileName);
// zwraca true, jeķli bot wielkoķci BoundingRadius nie moŋe przejķæ z A do B
// bez wpadania na geometrię ķwiata
bool isPathObstructed(Vector2D A, Vector2D B, double BoundingRadius = 0)const;
// zwraca wektor wskažników do botów w FOV danego bota
std::vector
// zwraca true, jeķli drugi bot nie jest zasģonięty przez ķciany i na polu
// widok pierwszego.
bool isSecondVisibleToFirst(const Raven_Bot* pFirst,
const Raven_Bot* pSecond)const;
/* WYJĄTKOWO SZCZEGÓĢOWE POMINIĘCIE DLA JASNOĶCI */
};
WSKAZÓWKA. Naleŋy pamiętaæ, ŋe GetAllBotsInFOV nie ogranicza liczby botów zwracanych przez metodę. Nie jest to konieczne w przypadku wersji demonstracyjnej, ale w przypadku gier, w których często pojawiają się dziesiątki, a nawet setki innych agentów, dobrym pomysģem jest ograniczenie liczby do n najbliŋszej, jaką agent moŋe zobaczyæ.
Mapa Raven
Klasa Raven_Map posiada kontenery wszystkich obiektów tworzących geometrię ķwiata gry - ķciany, wyzwalacze, punkty odradzania itp. - a takŋe instancję grafu nawigacyjnego mapy. Te elementy są tworzone po otwarciu pliku w formacie mapy Ravena. Po uruchomieniu Raven domyķlna mapa (Raven_DM1) i odpowiadający jej wykres nawigacyjny są odczytywane z pliku. Liczba losowych botów Raven jest następnie tworzona w losowo wybranych, niezajętych punktach odradzania.
UWAGA. Parametry Raven są przechowywane w pliku skryptu Lua params.lua. Dostęp do skryptów jest wygodny dzięki zastosowaniu klasy singletonowej Raven_Scriptor, która z kolei wywodzi się z klasy Scriptor. Ta klasa jest po prostu enkapsulacją wszystkich powszechnie uŋywanych metod dostępu do zmiennych Lua, takich jak LuaPopNumber i LuaPopString. Jeķli potrzebujesz dodatkowych wyjaķnieņ, sprawdž plik common / script / Scriptor.h. Oto częķciowa lista deklaracji Raven_Map.
class Raven_Map
{
public:
typedef NavGraphNode
typedef SparseGraph
typedef TriggerSystem
private:
// ķciany, które skģadają się na architekturę bieŋącej mapy
std::vector
// wyzwalacze to obiekty, które definiują region przestrzeni. Kiedy bot Ravena
// wchodzi w ten obszar, "wyzwala" zdarzenie. To wydarzenie moŋe byæ cokolwiek
// od zwiększenia zdrowia bota do otwarcia drzwi lub poproszenia o windę.
Trigger_System m_TriggerSystem;
// zawiera wiele pozycji odradzania. Kiedy instancja bota jest tworzona
// pojawi się w losowo wybranym punkcie wybranym z tego wektora
std::vector
// towarzyszący wykres nawigacyjny tej mapy
NavGraph* m_pNavGraph;
/* DODATKOWE SZCZEGÓĢY POMINIĘTO */
public:
Raven_Map();
~Raven_Map();
void Render();
// DODATKOWE SZCZEGÓĢY POMINIĘTO
bool LoadMap(const std::string& FileName);
void AddSoundTrigger(Raven_Bot* pSoundSource, double range);
double CalculateCostToTravelBetweenNodes(unsigned int nd1,
unsigned int nd2)const;
void UpdateTriggerSystem(std::list
/* DODATKOWE SZCZEGÓĢY POMINIĘTO */
};
Broņ Raven
Dostępne są cztery bronie.:
• Blaster: Jest to domyķlna broņ bota. Wystrzeliwuje zielone strzaģy elektrycznoķci z prędkoķcią trzech na sekundę. Ta broņ automatycznie się ģaduje, więc nigdy nie zabraknie jej amunicji. Zadaje tylko jedną jednostkę obraŋeņ na trafienie.
• Strzelba: Strzelbę moŋna wystrzeliæ tylko raz na sekundę. Kaŋdy nabój zawiera dziesięæ kulek, które rozchodzą się po opuszczeniu broni. Oznacza to, ŋe strzelba jest znacznie bardziej celna i zabójcza na bliskich ķrednich odlegģoķciach niŋ na dalekim dystansie. Kaŋda kula strzaģu zadaje jedną jednostkę obraŋeņ.
• Wyrzutnia rakiet: Wyrzutnia rakiet ma prędkoķæ wystrzeliwania 1,5 rakiety na sekundę. Rakiety lecą doķæ wolno i eksplodują przy zderzeniu. Kaŋda istota zģapana w promieņ wybuchu rakiety odniesie dziesięæ obraŋeņ. Poniewaŋ rakiety poruszają się doķæ wolno i moŋna je ģatwo uniknąæ, wyrzutnię rakiet najlepiej stosowaæ jako broņ ķredniego zasięgu.
• The Railgun: Railgun strzela pociskami w tempie 1 na sekundę. Railgun podróŋuje niemal natychmiast do celu, tworząc tę broņ idealną do strzelania z dystansu i strzelania z duŋej odlegģoķci. (Strzaģy Railguna są zatrzymywane tylko przez ķciany, więc jeķli trafi kilka botów stojących w linii, Railgun przeniknie wszystkie).
Bot Raven rozpoczyna kaŋdą grę z niszczycielem i zdobywa inne rodzaje broni, lokalizując je na mapie i przebiegając nad nimi. Jeķli bot ma juŋ broņ typu, na którą przejechaģ, do ekwipunku dodaje się tylko amunicję do broni. Kaŋdy z rodzajów broni dziedziczy po klasie Raven_Weapon. Publiczny interfejs klasy wygląda następująco:
class Raven_Weapon
{
public:
Raven_Weapon(unsigned int TypeOfGun
unsigned int DefaultNumRounds,
unsigned int MaxRoundsCarried,
double RateOfFire,
double IdealRange,
double ProjectileSpeed,
Raven_Bot* OwnerOfGun);
virtual ~Raven_Weapon(){}
// ta metoda celuje bronią w dany cel, obracając jej broņ w
// kierunku zwróconym przez wģaķciciela (ograniczony przez szybkoķæ obrotu bota). To
// zwraca true, jeķli broņ jest skierowana bezpoķrednio w cel
bool AimAt(Vector2D target)const;
// wyrzuca pocisk z broni w danej pozycji docelowej
// (pod warunkiem, ŋe broņ jest gotowa do rozģadowania … kaŋda broņ ma swoją
// wģasna szybkostrzelnoķæ)
virtual void ShootAt(Vector2D target) = 0;
// kaŋda broņ ma swój wģasny ksztaģt i kolor
virtual void Render() = 0;
// ta metoda zwraca wartoķæ reprezentującą celowoķæ uŋycia
//broņ. Jest to wykorzystywane przez AI do wyboru najbardziej odpowiedniej broni do gry
// w obecnej sytuacji bota. Ta wartoķæ jest obliczana przy uŋyciu logiki rozmytej.
virtual double GetDesirability(double DistToTarget)=0;
// zwraca maksymalną prędkoķæ pocisku wystrzeliwanego przez tę broņ
double GetProjectileSpeed()const;
int NumRoundsRemaining()const;
void DecrementNumRounds();
void IncrementRounds(int num);
// zwraca wyliczoną wartoķæ reprezentującą typ pistoletu
unsigned int GetTypeOfGun()const;
};
Wyzwalacze
Wyzwalacz to obiekt, który definiuje warunek, który po speģnieniu przez agenta generuje akcję (jest wyzwalany). Wiele wyzwalaczy wykorzystywanych w grach komercyjnych ma tę wģaķciwoķæ, ŋe są one wyzwalane, gdy jednostka gry wchodzi w obszar wyzwalania: z góry okreķlony obszar przestrzeni, który jest doģączony do wyzwalacza. Regiony te mogą mieæ dowolny dowolny ksztaģt, ale zwykle są okrągģe lub prostokątne w ķrodowiskach 2D oraz kuliste, szeķcienne lub cylindryczne w ķrodowiskach 3D. Wyzwalacze są niezwykle przydatnym narzędziem zarówno dla projektantów gier, jak i programistów AI. Moŋesz ich uŋywaæ do tworzenia róŋnego rodzaju zdarzeņ i zachowaņ. Na przykģad wyzwalacze uģatwiają wykonywanie takich czynnoķci:
• Postaæ z gry wędruje ponurym korytarzem. Wchodzi na wraŋliwą na nacisk pģytkę i uruchamia mechanizm, który wbija mu czterdzieķci gwoždzi w jamę brzuszną. (To jeden z najbardziej oczywistych zastosowaņ wyzwalacza).
• Zastrzelisz straŋnika. Kiedy umiera, do gry dodawany jest wyzwalacz, który ostrzega innych straŋników przed ciaģem, jeķli wędrują w okreķlonej odlegģoķci od niego.
• Postaæ z gry strzela z pistoletu. Do gry dodano wyzwalacz, który ostrzega kaŋdą inną postaæ w okreķlonym promieniu haģasu.
• Džwignia na ķcianie jest realizowana jako spust. Jeķli agent go pociągnie, otwiera drzwi.
• Zaimplementowaģeķ ukģadankę w jednym rogu pokoju, ale uwaŋasz, ŋe kilku graczy będzie miaģo problem z jej rozwiązaniem. Jako pomoc moŋesz doģączyæ wyzwalacz do ukģadanki, która aktywuje się, jeķli gracz stanie blisko niej więcej niŋ trzy razy. Po aktywacji spust wyzwala jakiķ system podpowiedzi, aby pomóc graczowi rozwiązaæ zagadkę.
• Troll uderza kolcem ogona w gģowę kolczastym kijem. Ogr ucieka, ale krwawi. Gdy kaŋda kropla krwi spada na ziemię, pozostawia wyzwalacz. Troll moŋe następnie ķcigaæ ogra, podąŋając ķladem krwi.
Raven korzysta z kilku rodzajów wyzwalaczy. Hierarchię klas podano na rysunku
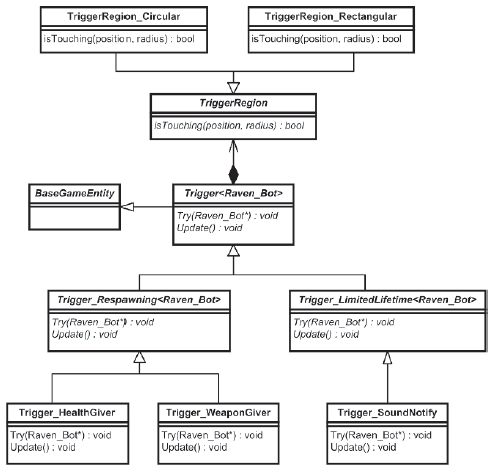
Warto poķwięciæ trochę czasu na szczegóģowe zbadanie kaŋdego z tych obiektów. Najpierw rzuæmy okiem na klasę TriggerRegion.
TriggerRegion
Klasa TriggerRegion definiuje metodę isTouching, którą muszą implementowaæ wszystkie regiony wyzwalające. Funkcja isTouching zwraca wartoķæ true, jeķli element o danym rozmiarze i pozycji zachodzi na region wyzwalający. Kaŋdy typ wyzwalacza ma instancję TriggerRegion i wykorzystuje metodę isTouching w celu ustalenia, kiedy naleŋy ją uruchomiæ. Oto jego deklaracja:
class TriggerRegion
{
public:
virtual ~TriggerRegion(){}
virtual bool isTouching(Vector2D EntityPos, double EntityRadius)const = 0;
};
A oto przykģad konkretnego regionu wyzwalającego, który definiuje okrągģy obszar przestrzeni:
class TriggerRegion_Circle : public TriggerRegion
{
private:
// centrum regionu
Vector2D m_vPos;
// promieņ regionu
double m_dRadius;
public:
TriggerRegion_Circle(Vector2D pos,
double radius):m_dRadius(radius),
m_vPos(pos)
{}
bool isTouching(Vector2D pos, double EntityRadius)const
{
// odlegģoķci obliczone w przestrzeni do kwadratu
return Vec2DDistanceSq(m_vPos, pos)
(EntityRadius + m_dRadius)*(EntityRadius + m_dRadius);
}
};
Jak widaæ, metoda isTouching zwróci wartoķæ true, gdy encja pokryje się z okręgiem zdefiniowanym przez region.
Trigger
Klasa Trigger jest klasą podstawową, z której pochodzą wszystkie inne typy wyzwalaczy. Ma dwie metody, które muszą zostaæ zaimplementowane przez wszystkie klasy potomne: Try and Update. Metody te nazywane są kaŋdą iteracją pętli aktualizacji gry. Aktualizacja aktualizuje stan wewnętrzny wyzwalacza (jeķli istnieje). Spróbuj przetestowaæ, czy jednostka przekazana do niego jako parametr nakģada się na region wyzwalający i odpowiednio podejmuje dziaģania. Deklaracja wyzwalacza jest prosta. Oto listing:
template < class entity_type >
class Trigger : public BaseGameEntity
{
private:
// Kaŋdy wyzwalacz ma region wyzwalacza. Jeķli jednostka jest objęta tym
// regionem wyzwalacz jest aktywowany
TriggerRegion* m_pRegionOfInfluence;
// jeķli to prawda, wyzwalacz zostanie usunięty z gry na stronie
// następna aktualizacja
bool m_bRemoveFromGame;
// wygodnie jest móc dezaktywowaæ niektóre typy wyzwalaczy
// na wydarzeniu. Dlatego wyzwalacz moŋna uruchomiæ tylko wtedy, gdy ta
// wartoķæ jest prawdziwa (wyzwalacze odradzania dobrze to wykorzystują)
bool m_bActive;
// niektóre typy wyzwalaczy są powiązane z węzģem graficznym. Umoŋliwia to
// komponent AI znajdujący ķcieŋkę do przeszukiwania grafu nawigacyjnego w poszukiwaniu okreķlonego
// typu wyzwalacza.
int m_iGraphNodeIndex;
protected:
void SetGraphNodeIndex(int idx){m_iGraphNodeIndex = idx;}
void SetToBeRemovedFromGame(){m_bRemoveFromGame = true;}
void SetInactive(){m_bActive = false;}
void SetActive(){m_bActive = true;}
// zwraca true, jeķli jednostka podana przez pozycję i promieņ ograniczający to
// nakģadanie się na region wyzwalający
bool isTouchingTrigger(Vector2D EntityPos, double EntityRadius)const;
// klasy potomne uŋywają jednej z tych metod, aby dodaæ region wyzwalający
void AddCircularTriggerRegion(Vector2D center, double radius);
void AddRectangularTriggerRegion(Vector2D TopLeft, Vector2D BottomRight);
public:
Trigger(unsigned int id);
virtual ~Trigger();
// kiedy to się nazywa, wyzwalacz okreķla, czy jednostka znajduje się w
// obszar wpģywu wyzwalacza. Jeķli tak, wyzwalaczem będzie
// wyzwalane i zostaną podjęte odpowiednie dziaģania.
virtual void Try(entity_type*) = 0;
// wywoģaģ kaŋdy krok aktualizacji gry. Ta metoda aktualizuje wszelkie wewnętrzne
// podaæ, ŋe wyzwalacz moŋe mieæ
virtual void Update() = 0;
int GraphNodeIndex()const{return m_iGraphNodeIndex;}
bool isToBeRemoved()const{return m_bRemoveFromGame;}
bool isActive(){return m_bActive;}
};
Wyzwalacze mają zmienną skģadową m_iGraphNodeIndex, poniewaŋ czasami przydatne jest ģączenie niektórych typów wyzwalaczy z węzģem wykresu nawigacyjnego. Na przykģad w Raven typy przedmiotów, takie jak zdrowie i broņ, są implementowane jako specjalny typ wyzwalacza zwanego wyzwalaczem dawcy. Poniewaŋ wyzwalacze dawcy są powiązane z węzģem grafu, narzędzie planowania ķcieŋki moŋe ģatwo przeszukiwaæ nawigator pod kątem okreķlonego typu elementu, na przykģad najbliŋszej instancji elementu zdrowia, gdy bot ma maģo zdrowia.
Odradzanie wyzwalaczy
Klasa Trigger_Respawning wywodzi się z Trigger i definiuje wyzwalacz, który staje się nieaktywny przez pewien okres czasu po tym, jak zostanie wyzwolony przez byt. Ten rodzaj wyzwalacza jest wykorzystywany w Raven do implementacji typów przedmiotów, które bot moŋe "podnieķæ", takich jak zdrowie lub broņ. W ten sposób przedmiot moŋe zostaæ odrodzony (ponownie wyķwietlony) w pierwotnej lokalizacji przez pewien czas po jego odebraniu.
template < class entity_type >
class Trigger_Respawning : public Trigger< entity_type >
{
protected:
// Gdy bot znajdzie się w obszarze wpģywu tego wyzwalacza, zostaje on wyzwolony
// ale następnie staje się nieaktywny na okreķlony czas. Te wartoķci
// kontroluj czas wymagany do przejķcia wyzwalacza w
// znów aktywny.
int m_iNumUpdatesBetweenRespawns;
int m_iNumUpdatesRemainingUntilRespawn;
// ustawia wyzwalacz na nieaktywny dla m_iNumUpdatesBetweenRespawns
// zaktualizuj kroki
void Deactivate()
{
SetInactive();
m_iNumUpdatesRemainingUntilRespawn = m_iNumUpdatesBetweenRespawns;
}
public:
Trigger_Respawning(int id);
virtual ~Trigger_Respawning();
// do wdroŋenia przez klasy potomne
virtual void Try(entity_type*) = 0;
// nazywa się to kaŋdym kliknięciem gry, aby zaktualizowaæ wewnętrzny stan wyzwalacza
virtual void Update()
{
if ( (--m_iNumUpdatesRemainingUntilRespawn <= 0) && !isActive())
{
SetActive();
}
}
void SetRespawnDelay(unsigned int numTicks);
};
UWAGA. Poniewaŋ Raven wykorzystuje staģą częstotliwoķæ aktualizacji, wyzwalacze uŋywają kroków aktualizacji jako reprezentacji czasu (kaŋdy krok aktualizacji to jedna jednostka czasu). Jeķli jednak zdecydujesz się zaimplementowaæ zmienną częstotliwoķæ aktualizacji systemu wyzwalacza, pamiętaj o zaprogramowaniu metody aktualizacji wyzwalacza tak, aby korzystaģa z róŋnicy czasu między aktualizacjami.
Wyzwalacze dawców
Przedmioty związane ze zdrowiem i bronią w Raven są realizowane za pomocą rodzaju wyzwalacza zwanego dawcą. Ilekroæ jednostka wkracza w region spustowy dawcy-wyzwalacza, "otrzymuje" odpowiedni przedmiot. Dawcy zdrowia w oczywisty sposób zwiększają zdrowie bota, a dawcy broni dostarczają botowi instancję typu broni, którą reprezentują. Innym sposobem patrzenia na to jest to, ŋe bot "podnosi" przedmiot reprezentowany przez spust. Aby umoŋliwiæ odrodzenie się przedmiotów zdrowia i broni po ich podniesieniu przez bota, wyzwalacze dziedziczą po klasie Trigger_Respawning.
Dawcy broni
Oto deklaracja klasy Trigger_WeaponGiver.
class Trigger_WeaponGiver : public Trigger_Respawning< Raven_Bot >
{
private:
/* ODATKOWE SZCZEGÓĢY POMINIĘTE */
public:
// ten typ wyzwalacza jest tworzony podczas odczytu pliku mapy
Trigger_WeaponGiver(std::ifstream& datafile);
// jeķli zostanie wyzwolony, ten wyzwalacz wywoģa metodę PickupWeapon w
//nerw. PickupWeapon uruchomi broņ odpowiedniego typu.
void Try(Raven_Bot*);
// rysuje symbol przedstawiający rodzaj broni w miejscu spustu
void Render();
/* ODATKOWE SZCZEGÓĢY POMINIĘTE */
};
Metoda Try jest zaimplementowana w następujący sposób:
{
if (isActive() && isTouchingTrigger(pBot->Pos(), pBot->BRadius()))
{
pBot->PickupWeapon( EntityType() );
Deactivate();
}
}
Jeķli wyzwalacz jest aktywny, a bot nakģada się na region wyzwalacza, wywoģywana jest metoda Raven_Bot :: PickupWeapon. Ta metoda tworzy instancję broni danego typu i dodaje ją (lub amunicję tylko wtedy, gdy jest juŋ w posiadaniu) do ekwipunku bota. Wreszcie logika dezaktywuje wyzwalacz. Wyzwalacz pozostanie dezaktywowany przez okreķlony czas, zanim zostanie ponownie aktywowany. Po dezaktywacji wyzwalacz nie będzie renderowany.
Dawcy Zdrowia
Wyzwalacze zdrowia są wdraŋane bardzo podobnie.
void Trigger_HealthGiver::Try(Raven_Bot* pBot)
{
if (isActive() && isTouchingTrigger(pBot->Pos(), pBot->BRadius()))
{
pBot->IncreaseHealth(m_iHealthGiven);
Deactivate();
}
}
Jak widaæ, jest to prawie taki sam kod, jak poprzednio, z tym wyjątkiem, ŋe tym razem zdrowie bota wyzwalającego jest zwiększone.
Wyzwalacze o ograniczonym okresie uŋytkowania
Czasami potrzebny jest wyzwalacz o ustalonej dģugoķci ŋycia - taki, który pozostaje w ķrodowisku przez pewną liczbę kroków aktualizacji, zanim zostanie automatycznie usunięty. Trigger_LimitedLifetime zapewnia taki obiekt.
template < class entity_type >
class Trigger_LimitedLifetime : public Trigger
{
protected:
// czas ŋycia tego wyzwalacza w krokach aktualizacji
int m_iLifetime;
public:
Trigger_LimitedLifetime(int lifetime);
virtual ~Trigger_LimitedLifetime(){}
// dzieci z tej klasy powinny zawsze upewniæ się, ŋe jest to wywoģywane z poziomu
// wģasną metodę aktualizacji
virtual void Update()
{
// jeķli upģynie okres waŋnoķci licznika, ustaw ten wyzwalacz, aby zostaģ usunięty z
// gry
if (--m_iLifetime <= 0)
{
SetToBeRemovedFromGame();
}
}
// do wdroŋenia przez klasy potomne
virtual void Try(entity_type*) = 0;
};
Džwiękowy wyzwalacz powiadomienia jest dobrym przykģadem tego, w jaki sposób uŋywane są wyzwalacze o ograniczonej dģugoķci ŋycia.
Wyzwalacze powiadomieņ džwiękowych
Ten typ wyzwalacza jest uŋywany w Raven do powiadamiania innych jednostek o džwiękach wystrzaģu. Za kaŋdym razem, gdy strzelana jest broņ, tworzony jest Trigger_SoundNotify i pozostawiany w miejscu strzaģu. Ten typ wyzwalacza ma okrągģy obszar wyzwalania o promieniu proporcjonalnym do gģoķnoķci broni. Wywodzi się z Trigger_LimitedLifetime i ma byæ aktywny tylko dla jednej aktualizacji wyzwalacza bota. Kiedy bot wyzwala ten typ wyzwalacza, wysyģa do niego komunikat informujący, który bot wydaģ džwięk.
class Trigger_SoundNotify : public Trigger_LimitedLifetime< Raven_Bot >
{
private:
// wskažnik do bota, który wydaģ ten džwięk
Raven_Bot* m_pSoundSource;
public:
Trigger_SoundNotify(Raven_Bot* source, double range);
void Trigger_SoundNotify::Try(Raven_Bot* pBot)
{
// czy ten bot znajduje się w zasięgu tego džwięku
if (isTouchingTrigger(pBot->Pos(), pBot->BRadius()))
{
Dispatcher->DispatchMsg(SEND_MSG_IMMEDIATELY,
SENDER_ID_IRRELEVANT,
pBot->ID(),
Msg_GunshotSound,
m_pSoundSource);
}
}
};
Zarządzanie wyzwalaczami: klasa TriggerSystem
Klasa TriggerSystem jest odpowiedzialna za zarządzanie kolekcją wyzwalaczy. Klasa Raven_Map jest wģaķcicielem instancji TriggerSystem i rejestruje kaŋdy wyzwalacz w systemie podczas jego tworzenia. System wyzwalaczy zajmuje się aktualizacją i renderowaniem wszystkich zarejestrowanych wyzwalaczy i usuwa wyzwalacze w miarę upģywu ich okresu uŋytkowania. Oto žródģo TriggerSystem. Wymieniģem ciaģa metod UpdateTrigger i TryTrigger, abyķ mógģ dokģadnie zobaczyæ, jak dziaģają.
template < class trigger_type >
class TriggerSystem
{
public:
typedef std::list
private:
// pojemnik wszystkich wyzwalaczy
TriggerList m_Triggers;
// ta metoda dokonuje iteracji przez wszystkie wyzwalacze obecne w systemie i
// wywoģuje metodę aktualizacji, aby ich stan wewnętrzny mógģ byæ
// zaktualizowany w razie potrzeby. Usuwa równieŋ wszelkie wyzwalacze z systemu, który
// ustawia wartoķæ pola m_bRemoveFromGame na true.
void UpdateTriggers()
{
TriggerList::iterator curTrg = m_Triggers.begin();
while (curTrg != m_Triggers.end())
{
// usunąæ spust, jeķli nie ŋyje
if ((*curTrg)->isToBeRemoved())
{
delete *curTrg;
curTrg = m_Triggers.erase(curTrg);
}
else
{
// zaktualizuj ten wyzwalacz
(*curTrg)->Update();
++curTrg;
}
}
}
// ta metoda iteruje przez kontener jednostek przekazywany jako
// parametr i przekazuje kaŋdy z nich do metody Try kaŋdego podanego wyzwalacza
// jednostka ŋyje i jest gotowa na aktualizację wyzwalacza.
template
void TryTriggers(ContainerOfEntities& entities)
{
// przetestuj kaŋdą jednostkę pod kątem wyzwalaczy
ContainerOfEntities::iterator curEnt = entities.begin();
for (curEnt; curEnt != entities.end(); ++curEnt)
{
// jednostka musi byæ gotowa na następną aktualizację wyzwalacza i musi byæ
// ŋywy, zanim zostanie przetestowany dla kaŋdego wyzwalacza.
if ((*curEnt)->isReadyForTriggerUpdate() && (*curEnt)->isAlive())
{
TriggerList::const_iterator curTrg;
for (curTrg = m_Triggers.begin(); curTrg != m_Triggers.end(); ++curTrg)
{
(*curTrg)->Try(*curEnt);
}
}
}
}
public:
˜TriggerSystem()
{
Clear();
}
// powoduje to usunięcie wszystkich bieŋących wyzwalaczy i opróŋnia listę wyzwalaczy
void Clear();
// Ta metoda powinna byæ nazywana na kaŋdym etapie aktualizacji gry. Najpierw będzie
// zaktualizuj wewnętrzny stan wyzwalaczy, a następnie wypróbuj kaŋdą jednostkę przeciwko
// kaŋdy aktywny wyzwalacz, aby sprawdziæ, czy naleŋy go uruchomiæ.
template
void Update(ContainerOfEntities& entities)
{
UpdateTriggers();
TryTriggers(entities);
}
// sģuŋy do rejestrowania wyzwalaczy w TriggerSystem (TriggerSystem
// zajmie się uporządkowaniem pamięci uŋywanej przez wyzwalacz)
void Register(trigger_type* trigger);
// niektóre wyzwalacze muszą zostaæ zrenderowane (jak na przykģad wyzwalacze)
void Render();
const TriggerList& GetTriggers()const{return m_Triggers;}
};
Okej, to powinno wystarczyæ do wglądu w ramy gry Raven. Przyjrzyjmy się teraz projektowi sztucznej inteligencji bota.
Zagadnienia dotyczące projektowania AI
Do projektowania sztucznej inteligencji botów Raven podchodzimy w zwykģy sposób: zastanówmy się, jakie zachowanie jest wymagane od botów, aby odnieķæ sukces w ich ķrodowisku i rozģóŋ to zachowanie na listę komponentów, które jesteķmy w stanie zaimplementowaæ i koordynowaæ. Jestem pewien, ŋe graģeķ lub obserwowaģeķ, jak ktoķ gra w deathmatch podobny do Quake'a, więc zastanówmy się nad tym doķwiadczeniem i zobaczmy, jakie obserwacje moŋna powiedzieæ o tym, jak czģowiek gra w tego rodzaju grę. Dwie oczywiste wymagane umiejętnoķci to umiejętnoķæ poruszania się oraz umiejętnoķæ celowania i strzelania z broni w innych graczy. Nie jest tak od razu oczywiste, ŋe jeķli obserwujesz doķwiadczonych graczy, zauwaŋysz, ŋe prawie zawsze celują i strzelają do wroga (pod warunkiem, ŋe jeden znajduje się w ich pobliŋu), niezaleŋnie od tego, czy atakują, czy bronią się, i niezaleŋnie od kierunku, w którym się znajdują. w ruchu. Na przykģad, mogą oni atakowaæ z boku na bok lub uciekaæ do tyģu, jednoczeķnie stawiając ogieņ obronny. Wyciągniemy wskazówkę z tej obserwacji i zaimplementujemy elementy obsģugi broni i ruchu AI, aby dziaģaģy one niezaleŋnie od siebie. Jakich umiejętnoķci związanych z ruchem będzie potrzebowaæ AI? Oczywiste jest, ŋe bot powinien byæ w stanie poruszaæ się w dowolnym kierunku, unikając jednoczeķnie ķcian i innych botów. Widzimy takŋe, ŋe konieczne jest zaimplementowanie pewnego rodzaju algorytmu wyszukiwania, aby umoŋliwiæ AI zaplanowanie ķcieŋek do okreķlonych lokalizacji lub przedmiotów.
Co z obsģugą broni? Jakie decyzje związane z bronią
Czy gracz musi coķ zrobiæ? Po pierwsze, gracz musi zdecydowaæ, która broņ najlepiej pasuje do bieŋącej sytuacji. W Raven są cztery rodzaje broni: blaster, strzelba, wyrzutnia rakiet i karabin. Kaŋda z tych broni ma zalety i wady. Na przykģad strzelba jest niszcząca, gdy w pobliŋu znajduje się wróg, ale ze względu na sposób, w jaki strzaģ rozchodzi się na zewnątrz, gdy odsuwa się od lufy pistoletu, staje się znacznie mniej skuteczny z odlegģoķcią. Wyrzutnia rakiet jest ķwietna na ķrednim dystansie, ale uŋywanie jej z bliska jest niebezpieczne ze względu na efekt rozbicia od wybuchu. Kaŋda wdroŋona sztuczna inteligencja musi byæ w stanie rozwaŋyæ zalety i wady kaŋdej broni i odpowiednio ją wybraæ. Gracz musi równieŋ byæ w stanie skutecznie wycelowaæ wybraną broņ. W przypadku broni, która wystrzeliwuje pociski o duŋej prędkoķci, takiej jak karabin i strzelba, gracz musi celowaæ bezpoķrednio w pozycję wroga, ale w przypadku broni, która wystrzeliwuje pociski wolniej poruszające się, takie jak blaster lub wyrzutnia rakiet, gracz musi byæ w stanie przewidzieæ ruch wroga i odpowiednio celowaæ. Bot AI musi byæ w stanie zrobiæ to samo. Często w tego rodzaju grach gracz zmierzy się z wieloma przeciwnikami. Jeķli widocznych jest dwóch lub więcej wrogów, gracz musi zdecydowaæ, na którego z nich celowaæ. W rezultacie kaŋda zaprojektowana przez nas sztuczna inteligencja musi byæ w stanie wybraæ jeden cel z grupy. To prowadzi nas do kolejnej kwestii: percepcji. Ludzcy gracze wybierają cele spoķród przeciwników postrzeganych przez ich zmysģy. W Raven obejmuje to widocznych przeciwników i przeciwników, którzy są wystarczająco gģoķni, aby je usģyszeæ. Ponadto ludzie uŋywają równieŋ pamięci krótkotrwaģej do ķledzenia botów, które ostatnio napotkali; ludzcy gracze nie zapominają natychmiast o przeciwnikach, którzy niedawno wyszli ze swojego zasięgu sensorycznego. Na przykģad, jeķli gracz goni za celem, który następnie znika za rogiem, będzie goniģ za celem, nawet jeķli go nie widaæ. Aby byæ przekonującym, kaŋda sztuczna inteligencja musi równieŋ wykazywaæ podobne zdolnoķci sensoryczne. Oczywiķcie wszystkie wymienione dotychczas umiejętnoķci dziaģają na doķæ niskim poziomie. W wielu grach tego typu po prostu nie wystarczy biegaæ po mapie losowo, strzelając do wrogów tylko wtedy, gdy się na nich natkną. Przyzwoita sztuczna inteligencja musi byæ w stanie zastanowiæ się nad swoim stanem i stanem otaczającego go ķwiata oraz wybraæ dziaģania, które jego zdaniem pomogą poprawiæ jego stan. Na przykģad bot powinien byæ w stanie rozpoznaæ, kiedy zaczyna mu brakowaæ zdrowia, i opracowaæ plan lokalizacji i nawigowania do elementu zdrowia. Jeķli bot walczy z wrogiem, ale brakuje mu amunicji, powinien byæ w stanie rozwaŋyæ moŋliwoķæ przerwania walki w celu zlokalizowania kilku dodatkowych rakiet. Dlatego naleŋy zaimplementowaæ pewien rodzaj logiki decyzyjnej wysokiego poziomu.
Implementacja AI
Aby nasyciæ bota iluzją inteligencji, musimy zastosowaæ caģkiem spory wykaz umiejętnoķci i zdolnoķci. Przejrzyjmy je i omówmy, w jaki sposób kaŋdy z nich jest implementowany przez sztuczną inteligencję Raven
Podejmowanie decyzji
W procesach decyzyjnych boty Raven uŋywają architektury opartej na arbitraŋu celów. Zachowanie niezbędne do wygrania gry przez bota jest podzielone na kilka celów wysokiego poziomu, takich jak "atak", "znalezienie zdrowia" lub "goniæ cel". Cele moŋna zagnieŋdŋaæ i cele wysokiego poziomu skģadają się z co najmniej dwóch celów cząstkowych. Na przykģad cel "znajdž zdrowie" skģada się z podzadaņ "znajdž ķcieŋkę do najbliŋszego aktywnego elementu zdrowia" i "podąŋaj ķcieŋką do przedmiotu". Z kolei cel "podąŋaj ķcieŋką" moŋna rozģoŋyæ na kilka celów typu "przejķcie do pozycji". Za kaŋdym razem, gdy skģadnik decyzyjny sztucznej inteligencji bota jest aktualizowany, kaŋdy z celów wysokiego poziomu jest oceniany pod kątem jego przydatnoķci, biorąc pod uwagę obecny status bota, a jako bieŋący cel wybierany jest ten z najwyŋszym wynikiem. Następnie bot rozģoŋy ten cel na skģadowe podzadania i spróbuje zaspokoiæ kaŋdy z nich z kolei.
Ruch
W przypadku ruchu niskiego poziomu boty Raven korzystają z zachowaņ sterujących polegających na szukaniu, przybyciu, wędrowaniu, unikaniu ķcian i separacji. Nie ma wykrycia kolizji ani reakcji między botami a geometrią ķwiata; boty polegają wyģącznie na zachowaniach polegających na unikaniu ķcian i sterowaniu separacją podczas negocjowania swojego ķrodowiska. (Nie zalecam, abyķ stosowaģ to podejķcie w swoich wģasnych projektach - Twoja gra prawdopodobnie będzie wymagaģa znacznie surowszego wykrywania kolizji - ale jest odpowiednia dla wersji demonstracyjnych towarzyszących tej ksiąŋce. Jest to równieŋ doķæ dobra demonstracja tego, jak skuteczne są zachowania kierownicze moŋe byæ zastosowany prawidģowo.) Zachowania sterujące są realizowane w zwykģy sposób opisany w poprzednich rozdziaģach. Klasa Raven_Bot dziedziczy po MovingEntity i tworzy instancję wģasnego wystąpienia znanego obiektu zachowania sterującego. Komponenty AI, które wpģywają na ruch bota, uŋywają interfejsu do tego wystąpienia, aby kontrolowaæ ruch bota.
Planowanie ķcieŋki
Boty w Raven muszą byæ w stanie planowaæ ķcieŋki przez otoczenie, aby przejķæ do miejsca docelowego lub w kierunku instancji przedmiotu gry, takiego jak broņ lub zdrowie. Aby uģatwiæ ten proces, kaŋdy bot posiada dedykowaną klasę planowania ķcieŋek, której jego skģadnik decyzyjny moŋe uŋywaæ do ŋądania ķcieŋek.
Postrzeganie
W przypadku wielu gatunków gier (ale nie wszystkich) dokģadne modelowanie percepcji jest jednym z kluczy do utrzymania zģudzenia inteligencji, poniewaŋ ķwiadomoķæ agenta dotycząca jego ķrodowiska powinna byæ spójna z jego ucieleķnieniem. Jeķli postaæ z gry ma dwoje oczu i dwoje uszu usytuowanych na gģowie w podobny sposób jak czģowiek, powinna odpowiednio postrzegaæ swoje otoczenie. Nie oznacza to, ŋe musimy modelowaæ widzenie stereo i sģyszenie, ale najwaŋniejsze jest, aby w grze tego typu logika decyzyjna agenta byģa spójna z tym, co powinna i nie powinna byæ w stanie dostrzec w swoim horyzoncie sensorycznym. Jeķli pojawi się jakaķ niespójnoķæ, gracz będzie rozczarowany, a jego przyjemnoķæ z gry zostanie znacznie zmniejszona. Na przykģad jestem pewien, ŋe większoķæ z nas widziaģa zachowania podobne do poniŋszych.
• Podchodzisz do bota w ciszy od tyģu, ale natychmiast się obraca wokóģ (moŋe sģyszy mrugnięcie) i fragmentuje jelito pistoletem ģaņcuchowym.
• Biegniesz i chowasz się. Wróg nie moŋe wiedzieæ, ŋe zamknąģeķ się w maleņkim pomieszczeniu magazynowym, ale mimo to przechodzi bezpoķrednio do twojej lokalizacji, otwiera drzwi i rzuca granatem do ķrodka.
• Zauwaŋysz dwóch straŋników w wieŋy straŋniczej. Zamiatają ziemię potęŋnym reflektorem, ale zauwaŋasz ķcieŋkę do podstawy wieŋy, która zawsze jest w ciemnoķci. Czoģgasz się spokojnie i pewnie swoją wybraną trasą. Reflektor nigdy nie zbliŋa się do ciebie, ale jest jednym z nich , straŋnicy krzyczą "Achtung" i strzelają ci w tyģek.
Tego rodzaju zdarzenia występują, poniewaŋ programista zapewniģ AI caģkowity dostęp do danych gry, dzięki czemu agenci otrzymali dar wszechmocy sensorycznej. Zrobiģ to, poniewaŋ byģo ģatwiej, lub poniewaŋ nie miaģ czasu na oddzielenie prawdy od percepcji, a moŋe po prostu dlatego, ŋe nie zastanawiaģ się. W kaŋdym razie jest to duŋe "nie-nie" dla graczy. Stracą zainteresowanie grą, poniewaŋ będą wierzyæ, ŋe AI oszukuje (co oczywiķcie występuje).
UWAGA. Ten typ modelowania sensorycznego nie jest tak waŋny w przypadku gier typu RTS, w których obciąŋenie procesorem / pamięcią związane z implementacją takiego systemu dla setek agentów prawdopodobnie będzie wygórowane. Wątpliwe jest równieŋ, aby dzięki wdroŋeniu takiego systemu wprowadzono znaczne usprawnienia w grze.
Aby uniknąæ tych niespójnoķci percepcyjnych, naleŋy przefiltrowaæ zmysģ widzenia i sģuchu agenta, aby zapewniæ spójnoķæ z jego moŋliwoķciami wizualnymi i sģuchowymi. Na przykģad w grze, w której kaŋdy bot musi wykazywaæ zdolnoķci sensoryczne podobne do ludzkiego gracza, jeķli widok gracza jest ograniczony do 90 stopni, boty powinny mieæ takie same ograniczenia. Jeķli wzrok gracza jest zasģonięty przez ķciany i przeszkody, powinno to równieŋ dotyczyæ botów. Jeķli gracz nie sģyszy mrugania postaci lub sģyszy džwięki dalej poza pewnym zasięgiem, boty teŋ nie powinny; a jeķli poziomy ķwiatģa odgrywają waŋną rolę w grze, bot nie powinien widzieæ w ciemnoķci (chyba ŋe nosi oczywiķcie gogle noktowizyjne). Innym rodzajem problemu związanego z percepcją, często spotykanym w grach komputerowych, jest to, co lubię nazywaæ selektywną niewiedzą sensoryczną: niezdolnoķæ agentów do wyczuwania okreķlonych rodzajów zdarzeņ lub bytów. Oto kilka typowych przykģadów.
• Wchodzisz do pokoju. W oddali są dwa trolle odwrócone do ciebie plecami. Są wystarczająco blisko, abyķ mógģ zrozumieæ ich mruczenie. Rozmawiają o obiedzie. Wilk wyskakuje z ciemnoķci po lewej stronie, zaskakując cię. Zabijasz ogra, uwalniając swoje największe i najgģoķniejsze zaklęcie: Death By Thunder Cannon. Ogr wybucha wspaniale w ryczącej eksplozji apokaliptycznej , ale dwa trolle tego nie sģyszą - po prostu dyskutują o zaletach sosu miętowego z pieczoną jagnięciną.
• Džgasz nazistowskiego straŋnika w plecy. Gdy osuwa się na podģogę, sģyszysz zbliŋających się straŋników, więc ty wķlizgujesz się w ciemny kąt. Straŋnicy wchodzą do pokoju, a dģoņ myszy napina się, gotowa na moment, kiedy zaczną rozglądaæ się za intruzem. Jednak straŋnicy nie widzą ciaģa na podģodze, nawet gdy przechodzą tuŋ nad nim.
• Znajdziesz się w walce hack and slash z upiornym wojownikiem. Niestety žle oceniģeķ sytuację i otrzymujesz powaŋne kopnięcie. W desperacji odwracasz się i wybiegasz najbliŋszymi drzwiami, by odkryæ, ŋe gdy tylko znikniesz z oczu, wojownik zapomni o tobie.
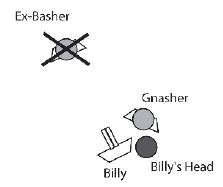
Po raz kolejny zģudzenie inteligencji zostaje przeģamane, poniewaŋ postacie w grze nie zachowują się zgodnie z oczekiwaniami wynikającymi z ich zdolnoķci percepcyjnych. W tych przykģadach nie dzieje się tak dlatego, ŋe agenci odbierają zbyt duŋo informacji, ale raczej za maģo. Ten ostatni przykģad jest szczególnie interesujący, poniewaŋ pokazuje,ŋe aby agent byģ przekonujący, musi zostaæ wyposaŋony w mechanizm symulujący pamięæ krótkotrwaģą. Bez pamięci krótkoterminowej agent nie jest w stanie rozwaŋyæ potencjalnych przeciwników, którzy leŋą poza horyzontem sensorycznym. Moŋe to spowodowaæ spektakularnie gģupie zachowanie. Na rycinie dwóch przeciwników - Zgrzytacz i Basher - znajduje się w polu widzenia Billy′ego, a on wybiera jednego, Basher, który będzie jego celem. Billy odwraca się do Bashera i strzela do niego.
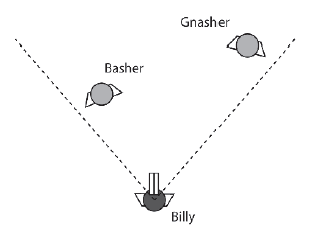
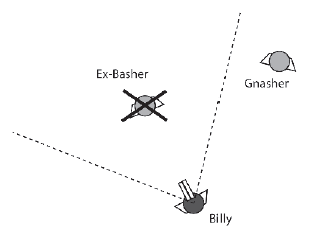
Na nieszczęķcie dla Billy′ego, poniewaŋ jego programista nie obdarzyģ go ŋadną pamięcią krótkotrwaģą, gdy tylko Zgrzytacz opuķci pole widzenia, zostaje zapomniany. To daje Gnasherowi okazję, by podkraķæ się do Billy&pime;ego i odgryžæ mu gģowę.
Tego rodzaju sekwencji moŋna ģatwo uniknąæ, jeķli agenci są w stanie zapamiętaæ to, co ostatnio wyczuli przez pewien czas. W Raven: zarządzanie, filtrowanie i zapamiętywanie zmysģów przez dane wejķciowe jest enkapsulowane przez klasę Raven_SensoryMemory, której kaŋdy bot posiada instancję. Ten obiekt zarządza std :: map MemoryRecords, która jest prostą strukturą danych, która wygląda następująco:
struct MemoryRecord
{
// rejestruje czas, w którym przeciwnik byģ ostatnio wykrywany (widziany lub sģyszany). To
// sģuŋy do ustalenia, czy bot moŋe "zapamiętaæ" ten rekord, czy nie.
// (jeķli CurrentTime () - dTimeLastSensed jest większy niŋ
// zakres pamięci bota, dane w tym rekordzie stają się niedostępne dla klientów)
double dTimeLastSensed;
// warto wiedzieæ, jak dģugo widoczny jest przeciwnik. To
// zmienna jest oznaczana bieŋącym czasem, ilekroæ przeciwnik po raz pierwszy staje się
//widoczny. W takim razie ģatwo jest obliczyæ, ile czasu ma przeciwnik
// byģ widoczny (CurrentTime - dTimeBecameVisible)
double dTimeBecameVisible;
// warto równieŋ wiedzieæ, kiedy ostatni raz widziano przeciwnika
double dTimeLastVisible;
// wektor oznaczający pozycję, w której przeciwnik zostaģ ostatnio wykryty. To moŋe
// byæ wykorzystywany do pomocy w wytropieniu przeciwnika, jeķli zniknie z pola widzenia
Vector2D vLastSensedPosition;
// ustawione na true, jeķli przeciwnik znajduje się w polu widzenia wģaķciciela
bool bWithinFOV;
// ustawione na true, jeķli nie ma przeszkody między przeciwnikiem a wģaķcicielem,
// pozwalając na strzaģ.
bool bShootable;
};
Za kaŋdym razem, gdy bot napotyka nowego przeciwnika, tworzona jest instancja MemoryRecord i dodawana do mapy pamięci. Po dokonaniu zapisu, za kaŋdym razem, gdy odpowiedni przeciwnik zostanie usģyszany lub zobaczony, jego zapis jest aktualizowany odpowiednimi informacjami. Bot moŋe korzystaæ z tej mapy pamięci, aby okreķliæ, których przeciwników wyczuwaģ ostatnio i odpowiednio zareagowaæ. Ponadto, poniewaŋ kaŋdy rekord pamięci buforuje informacje o widocznoķci, moŋna uniknąæ wielu obliczeņ dotyczących pola widzenia. Zamiast ŋądaæ czasochģonnych ŋądaņ linii wzroku od obiektu ķwiata gry, bot moŋe w prosty i szybki sposób odzyskaæ wartoķæ logiczną przechowywaną na mapie pamięci.
Deklaracja Raven_SensoryMemory jest następująca:
class Raven_SensoryMemory
{
private:
typedef std::map
private:
// wģaķciciel tego wystąpienia
Raven_Bot* m_pOwner;
// ten pojemnik sģuŋy do symulacji pamięci zdarzeņ sensorycznych. MemoryRecord
// jest tworzony dla kaŋdego przeciwnika w ķrodowisku. Kaŋdy rekord jest aktualizowany
// za kaŋdym razem, gdy napotkasz przeciwnika. (kiedy jest widziane lub sģyszane)
MemoryMap m_MemoryMap;
// bot ma zakres pamięci równowaŋny tej wartoķci. Gdy bot prosi o znak
// lista wszystkich ostatnio wykrytych przeciwników, ta wartoķæ sģuŋy do ustalenia, czy
// bot moŋe zapamiętaæ przeciwnika lub nie.
double m_dMemorySpan;
// ta metoda sprawdza, czy istnieje pBot. Jeķli
// nie, nowy rekord MemoryRecord jest tworzony i dodawany do mapy pamięci
// przez UpdateWithSoundSource & UpdateVision)
void MakeNewRecordIfNotAlreadyPresent(Raven_Bot* pBot);
public:
Raven_SensoryMemory(Raven_Bot* owner, double MemorySpan);
// ta metoda jest uŋywana do aktualizacji mapy pamięci, ilekroæ przeciwnik dokona gry
// haģas
void UpdateWithSoundSource(Raven_Bot* pNoiseMaker);
// ta metoda dokonuje iteracji przez wszystkich przeciwników w ķwiecie gry i
// aktualizuje zapisy tych, które znajdują się w FOV wģaķciciela
void UpdateVision();
bool isOpponentShootable(Raven_Bot* pOpponent)const;
bool isOpponentWithinFOV(Raven_Bot* pOpponent)const;
Vector2D GetLastRecordedPositionOfOpponent(Raven_Bot* pOpponent)const;
double GetTimeOpponentHasBeenVisible(Raven_Bot* pOpponent)const;
double GetTimeSinceLastSensed(Raven_Bot* pOpponent)const;
double GetTimeOpponentHasBeenOutOfView(Raven_Bot* pOpponent)const;
// ta metoda zwraca listę wszystkich przeciwników, którzy mieli swoje
// rekordy zaktualizowane w ciągu ostatnich m_dMemorySpan sekund.
std::list
};
Ilekroæ wystąpi zdarzenie džwiękowe, metoda UpdateWithSoundSource jest wywoģywana ze wskažnikiem do žródģa džwięku. UpdateVision jest wywoģywany z Raven_Bot :: Aktualizacja z okreķloną częstotliwoķcią. Razem te metody zapewniają, ŋe zmysģ sģuchu i wzroku bota jest zawsze aktualny. Bot moŋe następnie zaŋądaæ informacji z pamięci sensorycznej przy uŋyciu jednej z wymienionych metod, przy czym najbardziej interesującym jest GetListOfRecentlySensed-Opponents. Powoduje to iterację mapy pamięci i budowanie listy wszystkich przeciwników wykrytych w ostatniej pamięci. Oto jak wygląda metoda:
std::list
Raven_SensoryMemory::GetListOfRecentlySensedOpponents()const
{
// to zapisze wszystkich przeciwników, których bot moŋe zapamiętaæ
std::list
double CurrentTime = Clock->GetCurrentTime();
MemoryMap::const_iterator curRecord = m_MemoryMap.begin();
for (curRecord; curRecord!=m_MemoryMap.end(); ++curRecord)
{
// jeķli ten bot zostaģ ostatnio zaktualizowany w pamięci, dodaj do listy
if ( (CurrentTime - curRecord->second.dTimeLastSensed) <= m_dMemorySpan)
{
opponents.push_back(curRecord->first);
}
}
return opponents;
}
Jak widaæ, jeķli dany rekord nie zostaģ zaktualizowany w ciągu ostatnich m_dMemorySpan sekund, nie jest dodawany do listy, a bot skutecznie zapomina o tym przeciwniku. Zapewnia to, ŋe bot zapamięta przeciwnika na krótko po wykryciu, nawet jeķli zniknie z pola widzenia.
Wybór celu
Klasa, która obsģuguje wybór celu, nazywa się Raven_TargetingSystem. Kaŋdy Raven_Bot posiada instancję tej klasy i przekazuje do niej wybór celu. Deklaracja wygląda następująco:
class Raven_TargetingSystem
{
private:
// wģaķciciel tego systemu
Raven_Bot* m_pOwner;
// bieŋący cel (będzie pusty, jeķli nie zostanie przypisany cel)
Raven_Bot* m_pCurrentTarget;
public:
Raven_TargetingSystem(Raven_Bot* owner);
// za kaŋdym razem, gdy ta metoda jest nazywana przeciwnikiem w sensorycznym odczuciu wģaķciciela
// pamięæ jest sprawdzana, a najbliŋsza jest przypisywana do m_pCurrentTarget.
// jeķli nie ma przeciwników, którzy zaktualizowali swoje zapisy pamięci
// w zakresie pamięci wģaķciciela, wówczas ustawiony jest bieŋący cel
// do zera
void Update();
// zwraca true, jeķli istnieje aktualnie przypisany cel
bool isTargetPresent()const;
// zwraca true, jeķli cel znajduje się w polu widzenia wģaķciciela
bool isTargetWithinFOV()const;
// zwraca true, jeķli między celem jest niezakģócona linia wzroku
// i wģaķciciel
bool isTargetShootable()const;
// zwraca pozycję, w której cel byģ ostatnio widziany. Zgģasza wyjątek, jeķli
// nie ma obecnie przypisanego celu
Vector2D GetLastRecordedPosition()const;
// zwraca czas, przez jaki cel znajdowaģ się w polu widzenia
double GetTimeTargetHasBeenVisible()const;
// zwraca czas, przez jaki cel byģ niewidoczny
double GetTimeTargetHasBeenOutOfView()const;
// zwraca wskažnik do celu. zero, jeķli nie ma prądu docelowego.
Raven_Bot* GetTarget()const;
// ustawia wskažnik docelowy na null
void ClearTarget();
};
W okreķlonym przedziale czasowym metoda aktualizacji systemu kierowania jest wywoģywana z Raven_Bot :: Update. Aktualizacja uzyskuje listę ostatnio postrzeganych przeciwników z pamięci sensorycznej i wybiera jednego z nich jako aktualny cel. Kryterium wyboru stosowane przez boty Raven jest bardzo proste: Najbliŋszym przeciwnikiem jest aktualny cel. Dziaģa to odpowiednio dla Raven, ale twoja gra moŋe wymagaæ alternatywnych lub bardziej rygorystycznych kryteriów wyboru. Na przykģad moŋesz chcieæ zaprojektowaæ metodę wyboru, która zawiera jedną lub więcej z następujących opcji:
• Kąt odchylenia przeciwnika od kursu bota (innymi sģowy, jest on tuŋ przed tobą)
• Przeciwnik jest skierowany w stronę przeciwną (nie widzi cię - ukradkowy atak!)
• Zasięg broni, którą ma przeciwnik (nie moŋe mnie zdobyæ)
• Zasięg broni, którą nosi bot (nie mogę go zdobyæ)
• Wszelkie ulepszenia, których mogą uŋywaæ przeciwnicy lub bot (jaki on jest twardy?)
• Jak dģugo widoczny jest przeciwnik (prawdopodobnie wie o tym ja, jeķli wiem o nim)
• Ile obraŋeņ zadaģ botowi w ostatnim czasie kilka sekund (to mnie wkurza!)
• Ile razy przeciwnik zostaģ zabity przez bota (ha, ha!)
• Ile razy bot zostaģ zabity przez przeciwnika (meanie!)
Obsģuga broni
Boty Raven uŋywają klasy Raven_WeaponSystem do zarządzania wszystkimi operacjami specyficznymi dla broni i ich rozmieszczania. Ta klasa posiada std :: mapę instancji broni, wpisaną w ich typ, wskažnik do aktualnie posiadanej broni oraz zmienne oznaczające celnoķæ bota i czas reakcji bota. Te dwie ostatnie zmienne są wykorzystywane przez logikę celowania broni, aby uniemoŋliwiæ botowi trafienie w cel w 100 procentach przypadków lub strzelanie do przeciwnika, gdy tylko się pojawi. Jest to waŋne, poniewaŋ jeķli sztuczna inteligencja dziaģa zbyt dobrze, większoķæ graczy szybko się sfrustruje i przestanie graæ. Wartoķci te pozwalają testerom gry na dostosowanie poziomu umiejętnoķci botów, dopóki nie stoczą trudnej bitwy, ale przegrywają częķciej niŋ wygrywają. To, dla większoķci graczy, zapewni największą przyjemnoķæ z gry. Oprócz zmiennych skģadowych klasa ma metody dodawania broni, zmiany obecnej broni, celowania i strzelania z niej, a takŋe wybierania najlepszej broni dla bieŋącego stanu gry. Oto deklaracja do przejrzenia.
class Raven_WeaponSystem
{
private:
// mapa instancji broni wpisanych wedģug typu
typedef std::map
private:
Raven_Bot* m_pOwner;
// wskažniki do broni, którą nosi bot (bot moŋe nosiæ tylko jedno
// wystąpienie kaŋdej broni)
WeaponMap m_WeaponMap;
// wskažnik do broni, którą aktualnie trzyma bot
Raven_Weapon* m_pCurrentWeapon;
// to minimalny czas, jaki bot musi zobaczyæ przeciwnika przed
// moŋe na to zareagowaæ. Ta zmienna sģuŋy do zapobiegania strzelaniu bota w stronę
// przeciwnik, gdy tylko stanie się widoczny.
double m_dReactionTime;
// za kaŋdym razem, gdy wystrzeliwana jest bieŋąca broņ, przypadkowa iloķæ haģasu jest
// dodane do kąta strzaģu. Zapobiega to atakowaniu botów
// przeciwnik w 100% przypadków. Im niŋsza ta wartoķæ, tym dokģadniejsze
// cel bota będzie. Zalecane wartoķci wynoszą od 0 do 0,2 (wartoķæ
// reprezentuje maksymalne odchylenie w radianach, które moŋna dodaæ do kaŋdego strzaģu).
double m_dAimAccuracy;
// czas, przez który bot będzie kontynuowaģ celowanie w pozycję celu
// nawet jeķli cel zniknie z widoku.
double m_dAimPersistance;
// przewiduje, gdzie będzie cel, do chwili, gdy zajmie aktualną broņ
// typ pocisku, aby do niego dotrzeæ. Uŋywany przez TakeAimAndShoot
Vector2D PredictFuturePositionOfTarget()const;
// dodaje losowe odchylenie do kąta strzaģu nie większe niŋ m_dAimAccuracy
// rads
void AddNoiseToAim(Vector2D& AimingPos)const;
public:
Raven_WeaponSystem(Raven_Bot* owner,
double ReactionTime,
double AimAccuracy,
double AimPersistance);
˜Raven_WeaponSystem();
/ustawia mapę broni za pomocą tylko jednej broni: blaster
void Initialize();
// metoda ta wycelowuje aktualną broņ bota w cel (jeķli jest to strzaģka)
// cel) i, jeķli jest celowany prawidģowo, strzela rundą. (Nazywany kaŋdym krokiem aktualizacji
// z Raven_Bot :: Update)
void TakeAimAndShoot()const;
// ta metoda okreķla najodpowiedniejszą broņ do uŋycia, biorąc pod uwagę bieŋącą
// stan gry. (Wywoģywany co n kroków aktualizacji z Raven_Bot :: Update)
void SelectWeapon();
void SelectWeapon ();
// to doda broņ okreķlonego typu do ekwipunku bota.
// Jeķli bot ma juŋ broņ tego typu, dodawana jest tylko amunicja.
// (wywoģywany przez wyzwalacza broni, aby daæ botowi broņ)
void AddWeapon(unsigned int weapon_type);
// zmienia bieŋącą broņ na jeden z okreķlonego typu (pod warunkiem, ŋe ten typ
// jest w posiadaniu bota)
void ChangeWeapon(unsigned int type);
//zwraca wskažnik do bieŋącej broni
Raven_Weapon* GetCurrentWeapon()const{return m_pCurrentWeapon;}
// zwraca wskažnik do okreķlonego typu broni (jeķli w ekwipunku, null, jeķli
// nie)
Raven_Weapon* GetWeaponFromInventory(int weapon_type);
//zwraca iloķæ amunicji pozostaģej dla okreķlonej broni
int GetAmmoRemainingForWeapon(unsigned int weapon_type);
double ReactionTime()const{return m_dReactionTime;}
};
Metoda SelectWeapon wykorzystuje logikę rozmytą, aby wybraæ najlepszą broņ do uŋycia w bieŋącym stanie gry. Logika rozmyta to logika, która zostaģa poszerzona o prawdy częķciowe. Innymi sģowy, obiekt nie musi byæ ani czģonkiem zbioru, ani nie; z logiką rozmytą obiekt moŋe byæ do pewnego stopnia czģonkiem zbioru. Kaŋdy krok aktualizacji wywoģywany jest z metody TakeAimAndShoot z Raven_Bot :: Update. Ta metoda najpierw sprawdza system celowania, aby upewniæ się, ŋe bieŋący cel moŋna strzelaæ (system celowania z kolei pobiera te informacje z pamięci sensorycznej bota) lub dopiero niedawno zniknąģ z pola widzenia. Ten ostatni warunek zapewnia, ŋe bot będzie nadal celowaģ swoją bronią w cel, nawet jeķli na krótko uchyli się za ķcianą lub inną przeszkodą. Jeķli ŋaden z tych warunków nie jest speģniony, kierunek skierowania broni zostanie wyrównany z kierunkiem bota. Jeķli jeden z warunków jest speģniony, okreķla się najlepsze miejsce do wycelowania obecnej broni. W przypadku broni "natychmiastowego trafienia", takiej jak strzelba lub karabin, będzie to bezpoķrednio przy celu. W przypadku broni strzelającej wolniej poruszającymi się pociskami, takiej jak wyrzutnia rakiet lub miotacz, metoda musi przewidzieæ, gdzie będzie cel, zanim pocisk się do niego zbliŋy. Obliczenia te są podobne do obliczeņ stosowanych przy zachowaniu kierowania w poķcigu i są przeprowadzane za pomocą metody PredictFuturePositionOfTarget.
WSKAZÓWKA. W miarę, jak stoi kod Ravena, przewidywanie przyszģej pozycji celu do celowania bronią opiera się na jego prędkoķci chwilowej - prędkoķci, z jaką porusza się on w momencie obliczeņ. Moŋe to jednak dawaæ sģabe wyniki, zwģaszcza jeķli cel bardzo się omija. Bardziej dokģadną metodą jest pobranie ķredniej prędkoķci celu próbkowanej w ostatnich t krokach czasowych.
Po okreķleniu pozycji celowania logika obraca pozycję bota skierowaną w jego stronę i strzela do broni, pod warunkiem, ŋe celuje ona prawidģowo i ŋe cel jest widoczny dģuŋej niŋ czas wymagany do zareagowania bota. Caģa ta logika jest znacznie jaķniejsza w kodzie, więc oto lista metod:
void Raven_WeaponSystem::TakeAimAndShoot()const
{
// celuj bronią tylko wtedy, gdy bieŋący cel moŋna strzelaæ lub jeķli ma tylko
// bardzo niedawno zniknąģ z pola widzenia (ten ostatni warunek to zapewnienie
// broņ jest wycelowana w cel, nawet jeķli chwilowo uchyla się za ķcianą
// lub inną ochroną)
if (m_pOwner->GetTargetSys()->isTargetShootable() ||
(m_pOwner->GetTargetSys()->GetTimeTargetHasBeenOutOfView()
m_dAimPersistance) )
{
// pozycja, na którą będzie celowana broņ
Vector2D AimingPos = m_pOwner->GetTargetBot()->Pos();
// jeķli bieŋąca broņ nie jest pistoletem z natychmiastowym trafieniem, pozycja docelowa
// naleŋy dostosowaæ, aby uwzględniæ przewidywane ruchy
// celu
if (GetCurrentWeapon()->GetType() == type_rocket_launcher ||
GetCurrentWeapon()->GetType() == type_blaster)
{
AimingPos = PredictFuturePositionOfTarget();
// jeķli broņ jest wycelowana prawidģowo, między obrazem znajduje się linia wzroku
// bot i pozycja celowania, i byģo to widoczne juŋ od dģuŋszego czasu
// niŋ czas reakcji bota, strzelaj z broni
if ( m_pOwner->RotateFacingTowardPosition(AimingPos) &&
(m_pOwner->GetTargetSys()->GetTimeTargetHasBeenVisible() >
m_dReactionTime) &&
m_pOwner->GetWorld()->isLOSOkay(AimingPos, m_pOwner->Pos()))
{
AddNoiseToAim(AimingPos);
GetCurrentWeapon()->ShootAt(AimingPos);
}
}
// nie musisz przewidywaæ ruchu, celuj bezpoķrednio w cel
else
{
// jeķli broņ jest wycelowana prawidģowo i byģa widoczna przez pewien okres
// dģuŋej niŋ czas reakcji bota, strzelaj z broni
if ( m_pOwner->RotateFacingTowardPosition(AimingPos) &&
(m_pOwner->GetTargetSys()->GetTimeTargetHasBeenVisible() >
m_dReactionTime) )
{
AddNoiseToAim(AimingPos);
GetCurrentWeapon()->ShootAt(AimingPos);
}
}
}
// brak celu do strzelania, więc obróæ go tak, aby byģ równolegģy do bota
// kierunek kierunku
else
{
m_pOwner->RotateFacingTowardPosition(m_pOwner->Pos()+ m_pOwner->Heading());
}
}
Zwróæ uwagę, jak przy przewidywaniu pozycji celowania naleŋy wykonaæ test linii wzroku, aby upewniæ się, ŋe przewidywana pozycja nie jest zasģonięta przez ķciany. Nie jest to konieczne, jeķli broņ jest wycelowana bezpoķrednio w cel, poniewaŋ LOS do pozycji docelowej jest buforowany, gdy rekord pamięci celu jest aktualizowany. Zauwaŋ równieŋ, ŋe bezpoķrednio przed wystrzeleniem broni do pozycji celowania dodaje się trochę haģasu, aby 100% czasu nie trafiæ w cel.
WSKAZÓWKA. W przypadku niektórych gier dobrym pomysģem jest upewnienie się, ŋe agent kontrolowany przez AI zawsze chybia za pierwszym razem, gdy strzela do gracza. Jest tak, poniewaŋ strzaģ ostrzeŋe gracza przed obecnoķcią agenta, umoŋliwiając mu podjęcie odpowiednich dziaģaņ bez natychmiastowego zranienia. Jest to szczególnie przydatne w scenariuszach, w których gracz często wchodzi do niezbadanych pokoi peģnych zģych, poniewaŋ daje mu szansę na wycofanie się i podsumowanie sytuacji zamiast niespodziewanej rzezi. Ponadto, gdy celowo strzelasz, aby chybiæ, jeķli pocisk lub jego trajektoria jest ģatwo widoczna (jak rakieta lub strzaģa), moŋesz zwiększyæ emocje, upewniając się, ŋe strzaģ przechodzi blisko i w polu widzenia gracza. Kolejna dobra wskazówka dotycząca celowania: jeķli zdrowie gracza jest bardzo niskie, zmniejsz celnoķæ wszystkich botów, które do niego strzelają. W ten sposób zyskuje szansę na niesamowitą regenerację, która znacznie poprawi jego wraŋenia z gry. (Czuje się jak Aragorn w bitwie o Helm's Deep zamiast jak Paul Newman i Robert Redford w ostatnich minutach Butcha Cassidy'ego i Sundance Kid!)
Ģącząc wszystko razem
Rycina poniŋszy pokazuje, jak wzajemnie powiązane są elementy AI omówione na kilku ostatnich stronach.
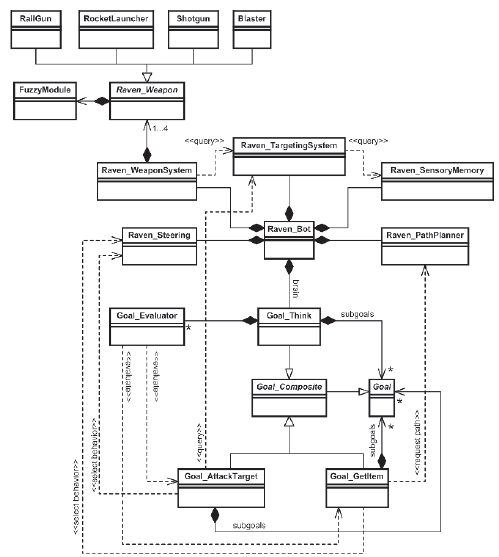
Zwróæ uwagę, ŋe obiekt Goal_Think nie ma bezpoķredniej kontroli nad komponentami niskiego poziomu, takimi jak ruch i obsģuga broni. Jego celem jest rozstrzyganie i zarządzanie przetwarzaniem celów wysokiego poziomu. Poszczególne cele wykorzystują komponenty niŋszego poziomu, gdy jest to wymagane. Wszystkie te komponenty są aktualizowane z okreķloną częstotliwoķcią z metody Raven_Bot :: Update, więc myķlę, ŋe wģaķnie tam powinniķmy spojrzeæ dalej.
Aktualizacja komponentów AI
Nie jest konieczne, aby wszystkie elementy AI bota byģy aktualizowane za kaŋdym razem. Wiele skģadników wymaga bardzo duŋo procesora, a ich aktualizacja w tym samym tempie byģaby szaleņstwem. Zamiast tego badany jest kaŋdy komponent, aby zobaczyæ, jak krytyczny jest czas lub ile procesora wymaga, a częstotliwoķæ aktualizacji jest odpowiednio przypisywana. Na przykģad generalnie istotne jest, aby komponent ruchu AI byģ aktualizowany za kaŋdym razem, aby poprawnie omijaæ przeszkody i ķciany. Element taki jak wybór broni nie jest tak krytyczny czasowo, dlatego jego częstotliwoķæ aktualizacji moŋe występowaæ znacznie wolniej; powiedzmy dwa razy na sekundę. Podobnie komponent pamięci sensorycznej bota, który sonduje ķwiat gry w poszukiwaniu widocznych przeciwników, jest bardzo wymagający pod względem procesora ze względu na liczbę przeprowadzonych testów z linii widzenia. Z tego powodu odpytywanie jest ograniczone do niskiej częstotliwoķci - domyķlnie cztery razy na sekundę - a wyniki są buforowane. To oczywiķcie nie jest nauka o rakietach. Często nie będziesz w stanie wiedzieæ, jaka jest idealna częstotliwoķæ aktualizacji, więc musisz dobrze zgadywaæ i dostosowywaæ, dopóki nie będziesz zadowolony z wyników. Boty Raven uŋywają instancji obiektów Regulator do kontrolowania aktualizacji kaŋdego z ich komponentów AI. Jest to prosta klasa, która jest tworzona za pomocą wymaganej częstotliwoķci aktualizacji i ma jedną metodę isReady, która zwraca wartoķæ true, jeķli nadszedģ czas, aby zezwoliæ na następną aktualizację. Deklaracja klasy wygląda następująco:
class Regulator
{
private:
// okres między aktualizacjami
double m_dUpdatePeriod;
// następnym razem regulator zezwoli na przepģyw kodu
DWORD m_dwNextUpdateTime;
public:
Regulator(double NumUpdatesPerSecondRqd);
// zwraca true, jeķli bieŋący czas przekracza m_dwNextUpdateTime
bool isReady();
};
Klasa Regulator automatycznie zapewnia rozģoŋenie aktualizacji na wiele etapów czasowych poprzez dodanie maģego losowego przesunięcia (od 0 do 1 sekundy) do m_dwNextUpdateTime po utworzeniu wystąpienia. (Bez tego przesunięcia ten sam komponent wszystkich aktywnych agentów zostanie zaktualizowany na tym samym etapie).
WSKAZÓWKA. Korzystając z regulatorów, moŋliwe jest takŋe wdroŋenie pewnego rodzaju sztucznej inteligencji "obniŋającej poziom szczegóģowoķci" poprzez obniŋenie szybkoķci aktualizacji niektórych elementów sztucznej inteligencji agentów, które są daleko od gracza i nie mają znaczenia dla jego bezpoķredniego doķwiadczenia. Raven tego nie robi, poniewaŋ ķwiat gry jest maģy, ale moŋesz spróbowaæ z tym pomysģem na wģasne gry. Klasa Raven_Bot tworzy kilka regulatorów i uŋywa większoķci z nich w swojej metodzie aktualizacji w następujący sposób:
void Raven_Bot::Update()
{
// przetworzy aktualnie aktywny cel. Zauwaŋ, ŋe jest to wymagane, nawet jeķli bot
// jest pod kontrolą uŋytkownika. Wynika to z faktu, ŋe cele są tworzone za kaŋdym razem, gdy uŋytkownik
// klika obszar mapy, który wymaga ŋądania planowania ķcieŋki.
m_pBrain->Process();
// Oblicz siģę kierowania i zaktualizuj prędkoķæ i pozycję bota
UpdateMovement();
// jeķli bot jest pod kontrolą AI
if (!isPossessed())
{
// zaktualizuj pamięæ sensoryczną za pomocą dowolnego bodžca wzrokowego
if (m_pVisionUpdateRegulator->isReady())
{
m_pSensoryMem->UpdateVision();
}
// sprawdž wszystkich przeciwników w pamięci sensorycznej bota i wybierz jednego z nich
// byæ bieŋącym celem
if (m_pTargetSelectionRegulator->isReady())
{
m_pTargSys->Update();
}
// oceniaj i rozstrzygaj wszystkie moŋliwe cele na wysokim poziomie
if (m_pGoalArbitrationRegulator->isReady())
{
m_pBrain->Arbitrate();
}
// wybierz odpowiednią broņ z broni obecnie znajdującej się w
// inwentaryzacja
if (m_pWeaponSelectionRegulator->isReady())
{
m_pWeaponSys->SelectWeapon();
}
// ta metoda wycelowuje aktualną broņ bota w bieŋący cel
// i oddaje strzaģ, jeķli jest to moŋliwe
m_pWeaponSys->TakeAimAndShoot();
}
}
UWAGA Agregujemy instancje Regulator w klasie Raven_Bot, poniewaŋ dzięki temu ich uŋycie jest bardziej wyražne. Moŋesz preferowaæ, aby obiekty wymagające regulacji tworzyģy wģasne instancje i uŋywaģy ich do kontrolowania przepģywu logiki w odpowiedniej metodzie (zwykle w metodzie aktualizacji).
Podsumowanie
Omówiono projektowanie sztucznej inteligencji dla agentów zdolnych do gry typu deathmatch. Chociaŋ twoje zrozumienie jest wciąŋ niepeģne, widziaģeķ, jak AI agenta moŋna rozģoŋyæ na kilka maģych, ģatwych w zarządzaniu komponentów, które są w stanie komunikowaæ się i wspóģpracowaæ, tworząc ujednolicone zachowanie. Pozostaģe rozdziaģy dostarczą gipsu do uzupeģnienia luk w twojej wiedzy.
Praktyka czyni mistrza
1. Jak dotąd boty Raven wyczuwają tylko przeciwników, których widzą lub sģyszą. Jednak nadal nie są w stanie poczuæ strasznego palenia i rozdzierania wraŋenie, jak stalowa obudowa pocisku rozdziera ich ciaģo. Napisz kod, aby zaktualizowaæ swój system sensoryczny, aby bot mógģ wykryæ, kiedy jest strzelany. Utwórz kolejne pole w strukturze MemoryRecord, aby zapisaæ obraŋenia zadane przez kaŋdego przeciwnika w ciągu ostatnich kilku sekund. Wartoķæ tę moŋna wykorzystaæ jako częķæ kryterium wyboru celu.
2. Wypróbuj róŋne kryteria wyboru celu. Obserwuj, jak wpģywają na rozgrywkę. Zmieņ kod, tak aby kaŋdy bot uŋywaģ unikalnego kryterium i rozegraj je ze sobą, aby zobaczyæ, który z nich dziaģa najlepiej.