Systemy Sterowania
W tej czê¶ci zajmiemy siê najbardziej zġoṡonymi elementami. Systemy sterowania mogḟ byæ bardzo bogato zdobione ale trudne do zbudowania. Mogḟ byæ zbudowane przy uṡyciu komputerów, elektroniki liniowej ,czê¶ci mechanicznej, czê¶ci biologicznych. Ale podstaw wszystkich systemów sterujḟcych jest królowa nauk - matematyka. Biorḟc pod uwagê zrozumienie matematyki, moṡemy oswoiæ dowolny z tych typów systemów sterujḟcych. W analizie koñcowej wszystkie zachowujḟ siê w ten sam sposób, podḟṡajḟc za tḟ samḟ matematykḟ. Byġoby herezjḟ dla niektórych, sugerowaæ ,ṡe systemy kontroli mogḟ byæ oswojone przez zrozumienie kilku równañ, ale faktem jest ,ṡe podstawowe koncepcje matematyczne systemu sterujḟcego mogḟ byæ znacznie uproszczone i udostêpnione. Je¶li nauczysz siê podstaw, moṡesz prawdopodobnie ekstrapolowaæ na inne przypadki uṡywajḟc swojego instynktu. To jest nasz cel! Systemy sterowania sḟ wszêdzie i mogḟ mieæ róṡne ksztaġty i rozmiary:
• Przeciêtny samochód ma w sobie 35 komputerów, napêdzajḟcych silnik, hamulce, radio, itd.
• Kaṡda toaleta posiada mechanizm sterujḟcy do uzupeġniania zbiornika odpowiedniḟ ilo¶ciḟ wody i bycia niezawodnḟ
• Ḋredni toster ¶wietnie nadaje siê do brḟzowienia chleba w powtarzalny sposób
• Prawdopodobnie moṡesz przej¶æ przez caġkowicie ciemny pokój, dotykajḟc kilku dobrze znanych kamieni milowych, wyciḟgnij rêkê i znajdỳ wġḟcznik ¶wiatġa prawie za kaṡdym razem .
Wszyscy uznajemy takie istniejḟce systemy sterujḟce za oczywiste. Zaġóṡmy ,ṡe zbudowali¶my juṡ duṡe, silne ciaġo robota z mocḟ, zwinno¶ciḟ, siġḟ, prêdko¶ci i zrêczno¶ciḟ, które uwaṡamy za potrzebne. Teraz nadchodzi trudna czê¶æ. Oto lista marzeñ niematerialnych , które moṡe byæ naprawdê przyjemne w robocie:
• Inteligencja
• Mḟdro¶æ
• Wspóġczucie
• Miġo¶æ
• Percepcja
• Umiejêtno¶ci komunikacyjne
Ta dġuga lista ,z wieloma krytycznymi charakterystykami (które powinna posiadaæ dobra "osoba") zostaġa przerwana. Ile z tych rzeczy powinien mieæ robot? Carl Sagan, znany astronom i autor, skomentowaġ kiedy¶ moc intelektualnḟ nieodġḟcznḟ w systemie sterowania sondy miêdzyplanetarnej. Powiedziaġa ,ṡe komputer sondy byġ intelektualnym odpowiednikiem krykieta. Sġowo o ostroṡno¶ci. Je¶li masz nadziejê zbudowaæ maszynê z mḟdro¶ciḟ i wspóġczuciem, masz przed sobḟ wielkie, niemoṡliwe zadanie. Oto kilka z gġêbokich problemów z jakimi bêdziesz musiaġ siê zmagaæ. Zachêcamy do rozwaṡenia kaṡdego z nich i zagġêbienie siê w przyczyny tych problemów i ich konsekwencje
• Prawdḟ jest ,ṡe ludzki mózg zdolny jest do masowych obliczeñ, znacznie wiêcej niṡ przeciêtny ogromny komputer. Je¶li w to wḟtpisz, rozwaṡ grê w szachy, w której ludzie bili komputery "na gġowê" od lat. Komputery zaprojektowane do gry w szachy dopiero nadrabiajḟ zalegġo¶ci. Pamiêtaj jednak ,ṡe gra w szachy jest grḟ, którḟ komputer moṡe przynajmniej ġatwo pojḟæ, tak aby programi¶ci mogli zoptymalizowaæ te obliczenia. Wiêkszo¶æ ṡycia jest duṡo bardziej zġoṡona niṡ szachy
• Wiêkszo¶æ aktów interakcji czġowieka prawdopodobnie nigdy nie zostanie zdefiniowana, a tym bardziej nie równa siê maszynie. Mḟdro¶æ, miġo¶æ i wspóġczucie przychodzḟ na my¶l
• Umysġ ludzki ma gġêbokie defekty, defekty, które manifestujḟ w codziennie nadawanych wiadomo¶ciach. Moṡna siê spieraæ z ewolucyjnego punktu widzenia ṡe ludzkie wady takie jak te wywoġujḟce chciwo¶æ i wojnê sḟ nieuniknione. Ponadto moṡna argumentowaæ ,ṡe te defekty nadal przynoszḟ korzy¶ci gatunkowi ludzkiemu i pomagajḟ siê rozmnaṡaæ. Moṡe to byæ kontrowersyjne, ale gdyby¶my chcieli wyhodowaæ takie cechy z ludzi, owady prawdopodobnie wyprḟ nas wcze¶niej niṡ mogliby¶my siê spodziewaæ. Maġy eksperyment : gdyby¶ mógġ nacisnḟæ przycisk i wywoġaæ agresjê, chciwo¶æ zazdro¶æ i inne podobne wady natychmiast znikajḟce z ludzkiej rasy, czy naprawdê wcisnḟġby¶ przycisk? Gdyby¶ mógġ wybraæ takie cechy dla swojego robota, czy je wbudowaġby¶?
• Ludzie nie mogḟ poznaæ swoich umysġów, a tym bardziej doskonale je powieliæ. Nie powstrzyma nas to jednak przed próbami
• Jako kontrargument dla poprzedniego stwierdzenia, naleṡy powiedzieæ, ṡe ludziom coraz trudniej jest rozróṡniaæ miêdzy ludzkimi a komputerowymi "osobowo¶ciami" . Alan M. Turing, brytyjski matematyk zaproponowaġ prosty eksperyment , który przerodziġ siê w okresowy test. Eksperyment, zwany Testem Turinga, rzuca wyzwanie przesġuchujḟcemu, który prowadzi rozmowê z dwiema niewidzialnymi jednostkami ,z których jedna to komputer a drugi to czġowiek. Osoba przesġuchujḟca musi odkryæ kto jest kim. Zwyciêzca otrzymuje Nagrodê Loebnera
• Kolejny problem, którego nie moṡna, a moṡe nie powinno , rozwiḟzaæ, rozwaṡa czy Twój robot powinien byæ mêski , ṡeñski czy bezpġciowy. W kaṡdym razie wariant testu Turinga prosi przesġuchujḟcego o rozróṡnienie miêdzy mêṡczyznḟ a kobietḟ. Jakie pytania chciaġby¶ zadaæ?
• Ludzie nie mogḟ siê ze sobḟ doskonale komunikowaæ Dana osoba moṡe tylko próbowaæ wypowiadaæ wġa¶ciwe sġowa , które wpajajḟ jego wġa¶ciwḟ ideê w umysġ innej osoby. Aby komunikowaæ siê werbalnie, formujemy nasze my¶li, wypowiadamy je, obserwujemy reakcje drugiej osoby i zmieniamy nasze wypowiedzi na podstawie jego reakcji. Wszystkie te dziaġania nie mogḟ byæ doskonale wykonane i zawsze majḟ niezamierzone rezultaty.
Je¶li napisaġe¶ specyfikacjê robota (i utrzymaġe¶ jḟ w prostocie), masz ograniczonḟ liczbê zadañ które robot musi wykonaæ. Wszystko co musisz zrobiæ to zbudowaæ robota, który wykona te zadania. Gdzie zaczynamy projektowanie robota, aby mógġ robiæ takie rzeczy? Na poczḟtek moṡemy spojrzeæ na naturê analogicznych projektów. Natura obfituje w systemy sterujḟce godne emulacji. Jednak nasze my¶li peġne sḟ wizji antropomorficznych wizji robotów. Pierwszym obrazem który przychodzi ci na my¶l jest robot z gġowḟ, dwojgiem oczu, dwoma uszami, ustami, dwoma ramionami i tuġowiem. Czy jeste¶my zwodzeni przez wġasne instynkty?
Rozproszone Systemy Sterujḟce
Pomimo wielu argumentów na rzecz istnienia rozproszonej inteligencji wewnḟtrz ludzkiego ciaġa, wyraỳnie istnieje centralny system kontroli : mózg. Czy jest to centralny system sterowania jakiego rzeczywi¶cie chcemy? Warto to rozwaṡyæ przed wyborem architektury. Rozwaṡmy ġawicê ¶ledzi. Pġywajḟ one w gigantycznych ġawicach, bġyskajḟc srebrzy¶cie w gġêbokim niebieskim ¶wietle oceanu. Kiedy tuñczyk przechodzi do ataku, ġawica natychmiastowo skrêca, dzieli siê i ġḟczy jakby za pomocḟ magii. To taktyka przetrwania ¶ledzi. Jak one tego dokonujḟ? Kaṡdy ¶ledỳ po prostu obserwuje swoich czterech najbliṡszych sḟsiadów i reaguje na pozycjê, prêdko¶æ i ruch. Efekt koñcowy na poziomie ġawicy jest dramatyczny i skuteczny. Tysiḟce maleñkich mózgów dziaġa niemal jak jeden, a tuñczyk jest czê¶ciowo sfrustrowany. Przy odrobinie szczê¶cia bêdḟ kġopotaæ krewetki. £awica ¶ledzi uṡywa
"rozproszonego" systemu sterowania. £awicḟ zarzḟdza wspólna wola i wspólne dziaġanie pojedynczych ryb. Rozwaṡmy zalety rozproszonego systemu sterowania:
• Tanio¶æ. Poszczególne elementy systemu sterowania sḟ proste i tanie. W tym przypadku musieliby¶my zaprojektowaæ cos prostego, jak ¶ledỳ , a nastêpnie powieliæ tysiḟce razy (uzyskujḟc korzy¶æ skali)
• Niezawodno¶æ. Je¶li system zaprojektowano tak aby przetrwaġ awariê czê¶ci systemu , kilka poraṡek go nie zniszczy. Z pewno¶ciḟ nie wszystkie ¶ledzie uciekajḟ przed tuñczykiem. £awica po prostu zmienia ksztaġt aby "zaġataæ" dziurê po zjedzonym ¶ledziu, a ṡycie toczy siê dalej
Rozproszony system sterowania ma teṡ pewne wady
• Komunikacja. Czasami trudno jest siê komunikowaæ wszystkim pomiêdzy pojedynczymi elementami sterujḟcymi. Ḋledỳ po drugiej stronie ġawicy nie wie o tuñczyku dopóki jego sḟsiad tego nie zasygnalizuje. Sygnaġ paniki rozprzestrzenia siê po ġawicy jak fala, ale moṡe byæ za póỳno. Ta forma wiedzy naprawdê jest mocḟ i sprawḟ ṡycia lub ¶mierci.
• Moc koñcowa. Poszczególne elementy wewnḟtrz rozproszonego systemu sterowania nie sḟ potêṡne same w sobie. Chociaṡ zbiorowa ġawica ¶ledzi rozwiḟzuje problem tuñczyka, jak równieṡ kaṡdy czġowiek lub komputer, pojedynczy ¶ledỳ nie moṡe dorównaæ czġowiekowi w matematyce lub rozumowaniu .Rozproszone systemy sterowania sḟ czêsto projektowane w celu rozwiḟzania konkretnych problemów i nie sḟ tak dobre w rozwiḟzywaniu problemów ogólnych. Je¶li korzystasz z rozproszonego systemu sterowania, bḟdỳ ostroṡny, poznajḟc wszystkie problemy z którymi musisz siê zmierzyæ. Je¶li specyfikacje ulegnḟ zmianie , twój projekt moṡe byæ skoġowany.
Centralne Systemy Sterowania
Rzuæmy okiem na scentralizowane systemy sterowania. Z pewno¶ciḟ zrozumienie pojedynczego systemu sterowania jest niezbêdne dla zrozumienia rozproszonego systemu sterowania. Wiêkszo¶æ systemów sterowania opiera siê na tych samych podstawowych strukturach sterujḟcych. Przyjrzymy siê kliku róṡnym strukturom, ale chodzi o to ,ṡe ich zachowanie moṡna opisaæ za pomoc tej samej matematyki.
Sterowanie W Otwartej Pêtli
Wiêkszo¶æ systemów sterowania robotami ma jaki¶ rodzaj sygnaġu wej¶ciowego i wyj¶ciowego. Pomiêdzy, ukġad sterowania odpowiada na sygnaġ wej¶ciowy i zmienia odpowiednio sygnaġ wyj¶ciowy. Sygnaġ wej¶ciowy jest generalnie sygnaġem sterujḟcym niskiego poziomu. Dwoma przykġadami sygnaġu wej¶ciowego mogḟ byæ , sygnaġ z przycisku zasilania na pilocie telewizora lub napiêcie liniowe z obrotowego przeġḟcznika przyciemniania .Zasadniczo w systemie sterowania, urzḟdzenie wykonawcze wzmacnia sygnaġ i przeksztaġca w sygnaġ wej¶ciowy. Kiedy osoba naci¶nie przycisk zasilania na pilocie telewizora, pilot generuje sygnaġ podczerwieni, który telewizor interpretuje jako zamkniêcie przekaỳnika i przekazanie zasilania do obwodów telewizora. W rzeczywisto¶ci dziaġajḟ dwa systemy sterowania w otwartej pêtli. W systemach sterowania w otwartej pêtli informacja ma tendencjê do przepġywania tylko w jednḟ stronê. Na przykġad, system sterowania wewnḟtrz pilota nigdy siê nie dowie czy telewizor siê wġḟczyġ czy nie. Ponadto przycisk zasilania na pilocie nigdy nie wskazuje czy wiḟzka podczerwieni zostaġa wysġana czy nie. Je¶li palec zasġania optykê, nic siê nie dziele, a pilot nie wie ṡe telewizor siê nie wġḟczyġ. Przeprowadỳmy eksperyment ilustrujḟcy system sterowania w otwartej pêtli wewnḟtrz ciaġa. Rzuæ okiem na prawo i zlokalizuj obiekt w pokoju. Zapamiêtaj gdzie jest a potem wróæ do tekstu. Teraz zamknij oczy, wskaṡ obiekt, próbujḟ poġoṡyæ palec na obiekcie w polu widzenia. Otwórz oczy a zobaczysz jak blisko jeste¶. Zauwaṡysz ,ṡe nigdy nie trafisz dobrze z zamkniêtymi oczami. Kiedy otworzysz oczy, zobaczysz ,ṡe Twój palec jest trochê wolny. Bġḟd nigdy nie znika i jest nazywana bġêdem stanu ustalonego. Jest to bġḟd , który utrzyma siê dġugo po tym ,jak system
sterowania ustali ostateczne wyniki i nie bêdzie dokonywaġ ṡadnych dalszych korekt. W równaniach , które rozwiniemy póỳniej, zobaczymy bġḟd stanu ustalonego. Wszystkie systemy sterowania majḟ ten bġḟd. Jest to waṡny parametr, poniewaṡ projektujḟc system sterowania, naleṡy utrzymywaæ bġḟd stanu stabilnego poniṡej dopuszczalnych granic. Moṡesz wykonaæ inny eksperyment, je¶li masz ¶ciemniacz w domu. Zaczekaj aṡ zapadnie ciemno¶æ i wyġḟcz ¶ciemniacz, przez co pokój staje siê ciemny. Zamknij oczy a potem wġḟcz ¶ciemniacz do miejsca, w którym uwaṡasz ,ṡe jest minimalny dopuszczalny poziom ¶wiatġa do czytania. Otwórz oczy i zobacz czy zrobiġe¶ to dobrze. Prawdopodobnie nie bêdziesz zadowolony z poziomu o¶wietlenia, poniewaṡ bġḟd stanu ustalonego bêdzie zbyt duṡy. Bêdziesz musiaġ poprawiæ natêṡenie ¶wiatġa aby wygodnie czytaæ. Poprawki jakie wprowadziġe¶, ostatecznie uṡywajḟc oczu, ilustrujḟ waṡnḟ koncepcjê. System sterowania w otwartej pêtli moṡe zostaæ ulepszony, je¶li powiemy jak dobrze jego dane wyj¶ciowe odpowiadajḟ wymaganiom danych wej¶ciowych.
Sterownie W Zamkniêtej Pêtli
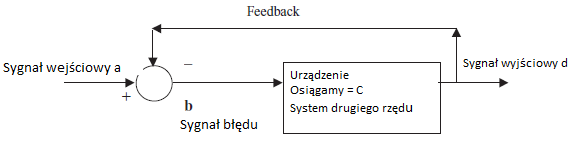
Systemy sterowania w pêtli zamkniêtej sḟ równieṡ nazywane systemami sterowania ze sprzêṡeniem zwrotnym poniewaṡ informacje pġynḟ wstecz w pewnym momencie w systemie sterowania. Zasadniczo ta odwrotna informacja przepġywa z wyj¶cia systemu sterowania wstecz do wej¶cia. Informacje które pġynḟ wstecz, umoṡliwiajḟ systemowi sterujḟcemu wprowadzanie poprawek w jego danych wyj¶ciowych.
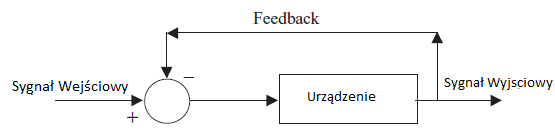
Zwrotny sygnaġ przepġywu informacji nazwali¶my "feedback" [sprzêṡenie zwrotne]. W tej prostej wersji ukġadu sterowania z zamkniêtḟ pêtlḟ , sygnaġ wyj¶ciowy jest wysyġany z powrotem i bezpo¶rednio porównywalny z wymaganiami ustawionymi przez sygnaġ wej¶ciowy. Okrḟg pokazuje obliczenia arytmetyczne (odejmowanie). Je¶li sygnaġ wyj¶ciowy nie pasuje bezpo¶rednio do sygnaġy wej¶ciowego, urzḟdzenie otrzyma na wej¶ciu sygnaġ niezerowy i dokona korekty na wyj¶ciu aby jego wej¶cie wróciġo do zera. W praktyce istnieje wiele róṡnych rodzajów sterowania w pêtli zamkniêtej i jako takie mogḟ byæ róṡne warianty tego schematu. Wiele systemów sterowania nie ma danych wyj¶ciowych które sḟ bezpo¶rednio porównywalne z danymi wej¶ciowymi; okrḟg ze schematu musi byæ bardziej zġoṡony niṡ w wypadku prostego odejmowania. Czêsto sygnaġ wyj¶ciowy musi zostaæ przeksztaġcony zanim bêdzie moṡna go porównaæ z sygnaġem wej¶ciowym. Takie przeksztaġcenia mogḟ mieæ postaæ skalowalnḟ (do innego rozmiaru) lub konwersji z jednego rodzaju sygnaġu na inny (jak warto¶æ ¶wiatġa na sygnaġ napiêcia). Czêsto porównanie wewnḟtrz okrḟgġego symbolu nie jest prostym odejmowaniem. Czasami jest to porównanie (wiêksze lub mniejsze) a dane wyj¶ciowe z okrêgu przedstawiajḟ albo wġḟczenie albo wyġḟczenie. Na przykġad termostaty dziaġajḟ w ten sposób. Oczywi¶cie system wyglḟda jako zamkniêta pêtla. Czêsto taki system jest równieṡ nazywany systemem sprzêṡenia zwrotnego w pêtli zamkniêtej. Wszystkie te terminy ogólnie oznaczajḟ to samo. Zacznijmy pierwszy eksperyment ponownie w inny sposób, jako system sterowania w pêtli zamkniêtej. Teraz zamknij oczy i ponownie wskaṡ obiekt (próbujḟc poġoṡyæ palec na przedmiocie w polu widzenia). Otwórz oczy i zobacz jak blisko jeste¶. Nadal nie udaġo ci siê z zamkniêtymi oczami ,ale teraz z otwartymi oczami, wprowadziġe¶ sprzêṡenie zwrotne do systemu. Z otwartymi oczami ġatwo jest dokonaæ korekty i przesunḟæ palcem nad obiektem w polu widzenia. Zauwaṡ ,ṡe bġḟd stanu stabilnego jest teraz znacznie mniejszy. Uwaṡamy, ṡe bġḟd wynosi zero, ale wkrótce przekonasz siê ,ṡe tak zdarza siê rzadko. Z pewno¶ciḟ,
kontrola w pêtli zamkniêtej jest lepszym rozwiḟzaniem pod wzglêdem dokġadno¶ci, ale wiḟṡe siê z kosztem zapewnienia dodatkowych elementów kontrolnych (w tym przypadku, wizji)
Bġḟd Stanu Stabilnego
Teraz kiedy zidentyfikowali¶my interesujḟcy nas parametr, spójrzmy na to matematycznie. Moṡemy przypisaæ dowolne zmienne dla reprezentowania sygnaġów i elementów sterujḟcych, jak poniṡej
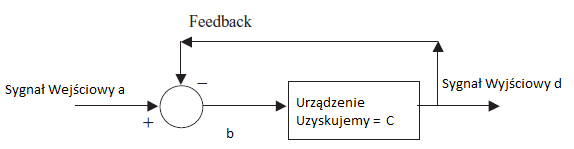
Patrzḟc na okrḟgġy element arytmetyczny (odejmowanie) b = a - d
Urzḟdzenie mówi, ṡe uzyskaġo C. Wzmocnienie moṡe byæ ogromne, ale system dziaġa nadal. Przykġadowo, je¶liw punkcie b mamy maġy, dodatni sygnaġ b, wtedy sygnaġ d moṡe byæ bardzo duṡy i dodatni. Podobnie, je¶li b, bêdzie maġym, ujemnym sygnaġem, wtedy d równieṡ bêdzie bardzo duṡe i ujemne. System zostaġ zaprojektowany do dziaġania z sygnaġem b, który jest bardzo maġy, prawie zerowy. Urzḟdzenie zazwyczaj zapewnia moc i wzmocnienie sygnaġu sterujḟcego d. Precyzyjniej
d = C x b
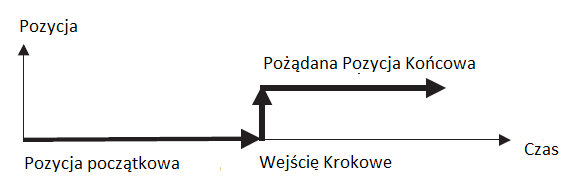
Zastêpujḟc b z poprzedniego równania, otrzymujemy
Na koniec uzyskujemy zwiḟzek miêdzy sygnaġem wej¶ciowym a i sygnaġem wyj¶ciowym d :
d = a x *C/1 + C)
To równanie przewiduje ,ṡe bġḟd stanu stabilnego tego rodzaju sterowania w systemie pêtli zamkniêtej jest regulowany przez C. Wyj¶cie d bêdzie wyġḟczane przez wspóġczynnik C/(1 + C). Wspóġczynnik ten jest równieṡ okre¶lany jako wspóġczynnik bġêdu stanu ustalonego. Zauwaṡ, ṡe nie moṡe byæ zerem; bġḟd stanu ustalonego zawsze istnieje. Zwróæ uwagê równieṡ ,ze im wiêksze wzmocnienie C urzḟdzenia, tym mniejszy bġḟd stanu stabilnego. Poniewaṡ C dḟṡy do nieskoñczono¶ci, bġḟd stanu stabilnego równieṡ dḟṡy do zera. Jakie praktyczne rzeczy moṡemy wyciḟgnḟæ z takiej matematyki?
• Oczekujemy ,ṡe system sterowania w pêtli zamkniêtej bêdzie wykazywaġ pewien bġḟd stanu stabilnego. Nie bḟdỳ zaskoczony je¶li system nie bêdzie wykazywaġ doskonaġej wydajno¶ci. Z pewno¶ciḟ bêdzie miaġ bġḟd
• Rozpoznanie ,ṡe bġḟd stanu stabilnego jest bardzo prawdopodobny i zaleṡny od wzmocnienia urzḟdzenia. Uṡyj wspóġczynnika bġêdu stanu ustalonego aby oszacowaæ z wyprzedzeniem, jaki bġḟd wystḟpi i zaprojektowaæ robota, aby umoṡliwiġ bġḟd w tym rozmiarze. Je¶li system ma zbyt duṡy bġḟd stanu stabilnego, naleṡy rozwaṡyæ zmianê wzmocnienia urzḟdzenia, w celu jego skorygowania
• Moṡemy sḟdziæ ,ṡe zwiêkszenie wzmocnienia urzḟdzenia jak to tylko jest moṡliwe, jest poṡḟdane. Naleṡy jednak pamiêtaæ ,ṡe zwiêkszenie wzmocnienia urzḟdzenia zwiêksza koszty i wpġynie negatywnie na zachowanie dynamiczne (stan niestabilny) systemu sterowania , co zobaczysz póỳniej. W najgorszym wypadku duṡe wzmocnienie urzḟdzenia moṡe powodowaæ niestabilno¶æ systemu i doprowadziæ do awarii. Zmieniajḟc wzmocnienie, pamiêtaj o ponownym sprawdzeniu dynamicznych parametrów systemu sterowania
U¶wiadom sobie ,ṡe te równania modelujḟ ogólny system sterowania w pêtli zamkniêtej. Je¶li system sterowania ma kontrolowaæ pozycjê robota, wtedy zmienne a, b i d sḟ miarḟ odlegġo¶ci. Je¶li ma kontrolowaæ szybko¶æ robota, zmienne te sḟ miarḟ szybko¶ci. Je¶li system ma kontrolowaæ przyspieszenie robota, zmienne te sḟ miarḟ przyspieszenia. Podstawy matematyki wciḟṡ sḟ takie same, zmieniajḟ siê tylko jednostki. Moṡemy uṡyæ opisanych tu równañ do kontrolowania dowolnego z wyṡej wymienionych systemów bez dalszego badania. Pozostawimy czytelnikowi zbadanie matematykê rachunku róṡniczkowego, która utrzymuje ,ṡe przyspieszenie jest pochodnḟ prêdko¶ci, a prêdko¶æ jest pochodnḟ pozycji. Wystarczy powiedzieæ ,ṡe dodatnie przyspieszenie zwiêksza prêdko¶æ, ujemne przyspieszenie (hamowanie lub przyspieszenie w odwrotnym kierunku) zmniejsza prêdko¶æ, dodatnia prêdko¶æ gromadzi odlegġo¶æ (pozycjê) a ujemnḟ prêdko¶æ (ruch w tyġ) zmniejsza odlegġo¶æ (pozycje)
Reakcja Dynamiczna
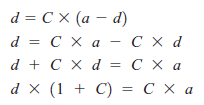
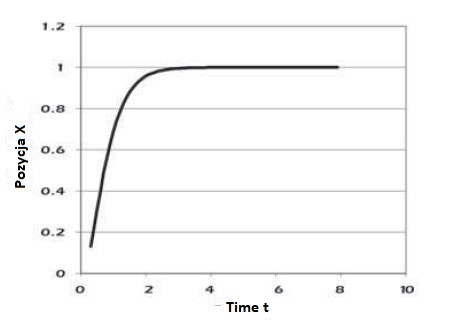
Kiedy system sterowania widzi zmieniajḟce siê dane na wej¶ciu, generalnie zmienia dane na wyj¶ciu. Standardowy test systemu sterowania jest dostarczenie tak zwanego wej¶cia krokowego. W przypadku robota , takie wej¶cie moṡe oznaczaæ przej¶cie z obecnej pozycji do nowej pozycji i zatrzymanie siê. Klasyczne wej¶cie uṡywane do testowania systemu sterowania jest krokiem wej¶ciowym i ma postaæ:
Idealny system sterowania bêdzie podḟṡaġ za funkcjḟ wej¶cia krokowego i stworzy takḟ samḟ funkcjê wyj¶cia krokowego. Robot natychmiast przeniósġby siê do nowej pozycji i zatrzymaġ precyzyjnie bez bġêdu stanu stabilnego. Wiemy jednak ,ṡe robot bêdzie miaġ bġḟd stanu stabilnego (nie osiḟgajḟc w peġni poṡḟdanej pozycji koñcowej). Prawda jest taka ,ze robot nie moṡe natychmiast ruszaæ i zatrzymywaæ siê precyzyjnie " w punkt". System sterowania w robocie widzi wej¶cie krokowe ,opóỳnia nieco czas reakcji, wreszcie zaczyna siê poruszaæ i próbuje zatrzymaæ w pobliṡu pozycji koñcowej. Odpowiedỳ bêdzie niedoskonaġa. Zanim przyjrzymy siê jak naprawdê zachowujḟ siê systemy sterowania, bêdziemy musieli siê zatrzymaæ i zajḟæ matematykḟ. Potem bêdziemy musieli uṡyæ narzêdzi aby zobaczyæ co nastêpuje:
• W jaki sposób projekt systemy sterowania okre¶la sposób reakcji robota
• Jak scharakteryzowaæ wydajno¶æ robota w kilku parametrach
• Jak sprawdziæ , które parametry projektu zmieniæ w zaleṡno¶ci od wydajno¶ci robota
• Jak uzyskaæ optymalnḟ wydajno¶æ robota
Aby uzyskaæ narzêdzia potrzebne do analizowania i manipulowania wydajno¶ciḟ robota, wybieramy model matematyczny dla robota i wyprowadzamy pewne równania. Pominiemy ġatwiejsze modele zachowania robotów i przejdziemy do nieco bardziej zġoṡonego przypadku. Zamierzamy uṡyæ matematyki i fizyki, które mogḟ wykraczaæ poza zwykġe umiejêtno¶ci czytelnika, ale powrócimy do uṡytecznego, intuicyjnego modelu tego co siê dzieje. Zaczniemy od fizyki, rachunku róṡniczkowego, transformaty Laplace′a i algebry dla uzyskania przydatnych wyników. Kiedy bêdziemy juṡ mieli tḟ matematykê przed sobḟ, zbadamy narzêdzia które nam do daġo. Po pierwsze , potrzebujemy sposobu aby spojrzeæ na czê¶ci robota i przypisaæ liczby do ruchów , które obserwujemy. Moṡna to zrobiæ na kilka sposobów:
• Oszacowanie energii. Jednym ze sposobów analizy dynamicznego ruchu jest spojrzenie na wszystko pod kḟtem energii : gdzie jest przechowywana i jak jest uṡywana. Nie bêdziemy uṡywaæ tej techniki ,ale warto wspomnieæ o alternatywnej technice. Energia jest przechowywana w wielu miejscach w robocie, na pewno w akumulatorach, ale równieṡ czasów jest przechowywana w innych miejscach
• Sprêṡyny (energia potencjalna). Dobry opis matematyczny sprêṡyny podamy póỳniej. Gdy sprêṡyna jest ¶ci¶niêta, energia E w sprêṡynie wynosi:
E = 0,5 x K x x2.
gdzie x jest dystansem ¶ciskania. Zwróæ uwagê ,ṡe to równanie dziaġa tylko dla mniejszych warto¶ci x , poniewaṡ nadmiernie ¶ci¶niêta sprêṡyna staje siê nieliniowa i koñczy siê sprêṡysto¶æ. K jest staġḟ sprêṡysto¶ci , wiêksza, mocniejsza sprêṡyna ma wiêkszḟ warto¶æ K.
• Masa ruchoma (energia kinetyczna) .Energia w poruszajḟcej siê masie
E = 0,5 x m x 2,
gdzie m to masa, którḟ opiszemy póỳniej, v to prêdko¶æ. Zwróæ uwagê ,ṡe ruchoma masa moṡe poruszaæ siê nie tylko liniowo. Moṡe równieṡ siê obracaæ. Je¶li tak, moṡesz modelowaæ energiê obu ruchów oddzielnie. Moṡesz uṡyæ ¶rodka ciêṡko¶ci masy i zobaczyæ jak szybko porusza siê liniowo. Nastêpnie moṡesz dodaæ energie obrotu wokóġ tego ¶rodka masy (je¶li jḟ odkryjesz)
" • Masa na wysoko¶ci (energia potencjalna) .Gdy masa znajduje siê na wysoko¶ci, jej energia potencjalna jest okre¶lona równaniem
E = m x g x h
gdzie M to masa, g to staġe przyspieszenie ziemskie 9.8 m/s2, , h to wysoko¶æ z jakie masa moṡe spa¶æ.
• Oszacowanie siġy. Zamiast patrzeæ na energiê uṡyjemy techniki patrzenia na wszystko w kategoriach siġy. Musimy tylko scharakteryzowaæ siġy w systemie, poniewaṡ dziaġajḟ razem. W ten sposób moṡemy przewidzieæ co zrobi fragment robota. A oto kilka miejsc przechowywania siġy w robocie:
- Siġy Silnika. Wiêkszo¶æ silników generuje zmiennḟ w czasie siġê przy stosowaniu energii. Siġa moṡe byæ obrotowa lub liniowa. Aby zachowaæ prostotê, bêdziemy przyglḟdaæ siê sile liniowej, takiej jakḟ moṡe przenosiæ solenoid. który jest elektromagnesem z ruchomym rdzeniem metalowym.
- Siġa masy ruchomej (energia kinetyczna). Newton stworzyġ równanie dla siġy dziaġajḟcej na masê ( lub masê wytwarzajḟcḟ siġê):
F = m x A
gdzie m jest masḟ a A jest przyspieszeniem (lub opóỳnieniem). Kiedy siġa grawitacji jest siġḟ zapewniajḟcḟ przyspieszenie , A = g a zatem F = m x g , siġa potrzebna dla utrzymania masy m
• Siġa sprêṡyny. Sprêṡyna ze staġḟ sprêṡysto¶ci K bêdzie miaġa siġê, w której z jest ¶ciskaniem (lub wydġuṡeniem) sprêṡyny
• Siġa tarcia. Tarcie jest siġḟ która jest wywoġywana przez prêdko¶æ poprzez ¶rodek tarcia. Na przykġad, silnik, kiedy wyġḟczone zostanie zasilanie, spowoduje zatrzymanie silnika siġḟ rozpêdu poniewaṡ jego wirnik ¶lizga siê po ġoṡyskach, a smar w ġoṡyskach nadal ma tarcie. Spadek prêdko¶ci jest nieco liniowy w czasie. Tarcie jest proporcjonalne do prêdko¶ci i ma siġê
F = B x v
gdzie B jest wspóġczynnikiem tarcia, a v to prêdko¶æ. Czyni to intuicyjnym sens. Kiedy pocierasz rêce, musisz pracowaæ ciêṡej by pocieraæ szybciej. Tarcie staje siê gorêtsze im szybciej pocierasz. Siġa wzrasta a energia ro¶nie szybciej. Tarcie przychodzi do nas w przebraniu. Czêsto my¶limy o tarciu jako o czym¶ co ciḟgniemy po powierzchni. Czêsto, elementy bêdḟ miaġy wġasne tarcie wewnêtrzne. Silnik sam siê zatrzyma. Sprêṡyny nagrzewajḟ siê przy odbijaniu, i powoli przestajḟ siê odbijaæ. Je¶li wspóġczynnik tarcia nie jest okre¶lony wewnḟtrz systemu, moṡemy go czêsto okre¶liæ empirycznie. Szybkim sposobem zrobienia tego jest obliczenie chwilowego opóỳnienia masy i porównanie dwóch siġ:
F = m x dla masy
F = B x v dla tarcia, wiêc
B = m x a/v
Ta technika dziaġa dla ruchów obrotowych, liniowych i sprêṡystych
Teraz musimy wybraæ mechaniczny model robota, aby stworzyæ dla niego model matematyczny. Wybieramy dowolny model, który prawdopodobnie róṡni siê od rzeczywistej mechaniki naszego robota. Jednak, kiedy nauczymy siê analizowaæ i manipulowaæ tymi arbitralnym modelem, bêdzie to naszḟ drugḟ naturḟ aby poszerzaæ wiedzê na inne modele. Wiêkszo¶æ systemów, nawet nietypowych, nieliniowych z ruchami nieregularnymi, moṡe byæ traktowana podobnie do modelu, który bêdziemy badaæ. Matematyka jest bliska tego samego. Spójrzmy na tzw. system drugiego rzêdu, poniewaṡ siġy sḟ oparte na trzech róṡnych reprezentacjach pozycji (przedstawionych w kategoriach rachunku róṡniczkowego) :
• Pozycja. Pozycja x ,masy. W przypadku sprêṡyn, siġa jest proporcjonalna do x
• Prêdko¶æ. v, szybko¶æ zmiany poġoṡenia x, masy , pierwsza pochodna z x. W rachunku róṡniczkowym nazywa siê to pierwszḟ pochodnḟ z x wzglêdem czasu (v = dx/dt). W codziennym ṡyciu my¶limy o tym jako kilometrach na godzinê. Siġa tarcia jest proporcjonalna do dx/dt
• Przyspieszenie. a jest szybko¶ciḟ zmiany prêdko¶ci, pierwsza pochodna z v, druga pochodna pozycji x. W rachunku róṡniczkowym a = dv/dt, lub kiedy piszemy z wyrazem x, a = d2x / dt2
W prostym systemie, w którym przysp
ieszenie jest staġe (np. grawitacja dziaġajḟca na spadajḟcy obiekt blisko powierzchni ziemi):
v = a x t
x = 0,5 x a x t2.
Najprostszym mechanicznym modelem drugiego rzêdu jest ciêṡar zawieszony na sprêṡynie. Zastanówmy siê hak zachowuje siê ten system. Zamierzamy przestawiæ schematy zachowaæ, po jednym na raz i wyliczyæ zachowania aby¶my mogli póỳniej to wyja¶ni gdy mamy juṡ równania
1. Po przesuniêciu ciêṡaru (masy) w pionie i zwolnieniu go, bêdzie odbijaġ w górê i w dóġ przy staġej czêstotliwo¶ci. Je¶li przemieszczenie utrzymuje sprêṡynê w jej obszarze liniowym (bez jej ¶ciskania lub rozciḟgania zbyt mocno), ruch masy bêdzie podobny do fali sinusoidalnej
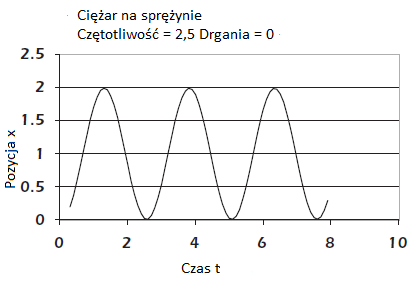
Ilustruje to czêstotliwo¶æ rezonansowḟ systemu drugiego rzêdu, którḟ póỳniej nazwiemy v. Czêstotliwo¶æ v jest mierzona w radianach na sekundê, gdzie mammy 2 x π radianów w pojedynczym cyklu
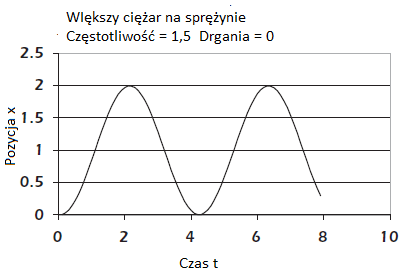
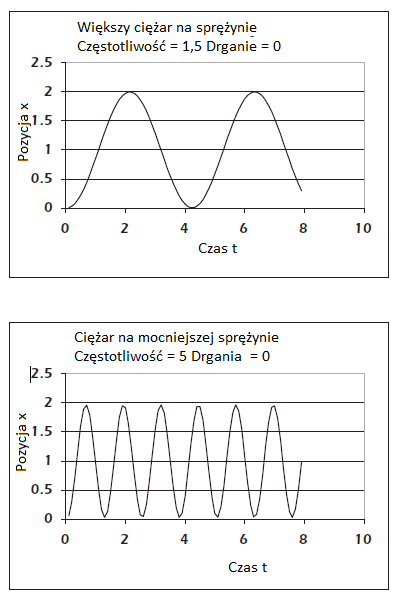
2. Wiemy, ṡe je¶li obciḟṡymy sprêṡynê, ciêṡar bêdzie odbijaġ w górê i w dóġ niṡ robi to lṡejszy ciêṡar. Aby to wypróbowaæ, zawie¶ dwa ciêṡarki na gumce. To ilustruje w jaki sposób ? maleje wraz z masḟ
3. Wiemy, ṡe mocniejsza sprêṡyna sprawia ,ṡe ciêṡar bêdzie szybciej odbijaġ siê w górê i w dóġ niṡ sġabsza sprêṡyna. Aby to sprawdziæ, drugḟ gumkê, tuṡ obok pierwszej tak aby dziaġaġy zgodnie
i uṡyj oryginalnego ciêṡaru pojedynczego. Ilustruje to w jaki sposób ? ro¶nie ze staġḟ sprêṡysto¶ci K
4. Wiemy, ṡe podskakujḟcy ciêṡar ostatecznie siê uspokoi i przestanie podskakiwaæ je¶li przestaniemy przesuwaæ sprêṡynê. Ilustruje to tġumiḟce dziaġanie tarcia. W tym szczególnym przypadku tarcie znajduje siê wewnḟtrz samej sprêṡyny (i w powietrzu). Gumki nagrzewajḟ siê gdy tarcie wewnḟtrz gumki zuṡywa energiê, która byġa w ruchu ciêṡarku. Póỳniej pomówimy o wspóġczynniku tġumienia ?. Oczywi¶cie, je¶li spróbujemy tego pod wodḟ, zamiast w powietrzu, tarcie bêdzie znacznie wiêksze, a system osiḟdzie duṡo szybciej
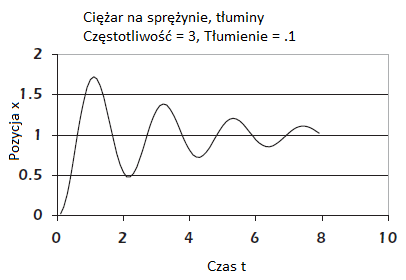
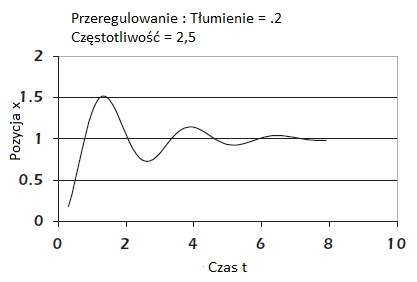
5. Wiemy ,ṡe w miarê przesuwania górnej czê¶ci gumki w górê (tak jak pokazane wcze¶niej wej¶cie krokowe), ciêṡar bêdzie wystrzeliwaġ wyṡej niṡ poṡḟdana pozycja koñcowa i ostatecznie osiada na wyṡszym poziomie. Nazywamy to nadmiernym ruchem ciêṡaru przeregulowania
Teraz czas na diagram naszego modelu systemu mechanicznego. Zamiast wiszḟcego ciêṡaru, wyeliminujemy siġê grawitacji i uṡyjemy systemu poziomego , gdzie ciêṡar spoczywa na ¶liskiej powierzchni. Je¶li chcesz wziḟæ ten ukġad poziomy i ekstrapolowaæ do ukġadu pionowego, po prostu rozciḟgnij sprêṡynê aby przeciwdziaġaæ przyspieszeniu siġy grawitacji na masê. Dla naszych obliczeñ, model poziomy pobiera te wyraṡenia z matematyki, poniewaṡ grawitacja nie rozciḟga sprêṡyny
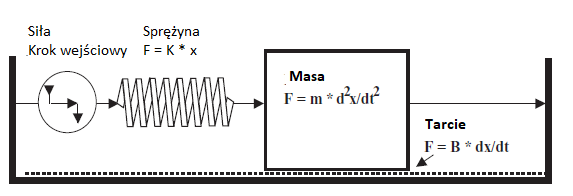
Podstawḟ odniesienia jest w tym przypadku ziemia. Nie powinna ona siê ruszaæ pod Tobḟ. W rzeczywisto¶ci, kiedy idziesz w jednḟ stronê, ziemia obraca siê w przeciwnḟ stronê. Ale poniewaṡ jest o wiele wiêksza od Ciebie, ruch jest niedostrzegalny. Pozostawiam to Tobie, aby obliczyæ rotacjê Ziemi, która miaġaby miejsce gdyby wszyscy na Ziemi zaczêli i¶æ w tym samym kierunku. Na razie zaġóṡmy ṡe grunt jest stabilny. Zagġêbimy siê w fizykê i matematykê bez powaṡnej próby wyja¶nienia jak to dziaġa. Siġa w zamkniêtej pêtli elementów mechanicznych sumuje siê do zera. Na podstawie tego otrzymujemy "charakterystyczne" równanie róṡniczkowe tego systemu mechanicznego:

To mówi, ṡe siġa sprêṡyny dziaġa , próbujḟc przyspieszyæ masê i pokonaæ tarcie. W rachunku róṡniczkowym, istnieje wiele sposobów rozwiḟzania takiego równania róṡniczkowego jak ten. Matematyka jest trochê trudna, ale francuski matematyk Laplace zapewniġ skrót w postaci transformaty Laplace'a. Zasadniczo eliminuje ona wymagania rachunku caġkowego i redukuje problem di algebry i przeszukiwania pewnych tablic. Dokonamy transformacji Laplace'a na nasze równanie róṡniczkowe, wykonamy algebrê, a nastêpnie wykorzystamy tabele do przeprowadzenia transformacji odwróconej Laplace'a aby odzyskaæ naszḟ odpowiedỳ w ¶wiecie rzeczywistym. Najpierw przeksztaġcimy nasze równanie róṡniczkowe za pomocḟ metod Laplace'a. Zastêpujemy zmiennḟ s oznaczajḟcḟ pojedyncze róṡniczkowanie. Jedno takie równanie róṡniczkowe staje siê :

Zamierzamy uṡyæ algebry aby znaleỳæ pierwiastki równania kwadratowego. Pamiêtasz stary wzór dla znajdowania pierwiastków równania kwadratowego? Zaġoṡê siê ,ṡe nie my¶laġe¶, ṡe bêdziesz go uṡywaġ! Poniṡej ponownie mamy równanie kwadratowe i jego dwa pierwiastki. Zauwaṡ ,ṡe te dwa pierwiastki sḟ pokazane ze znakiem + i - :

Zamierzamy uṡyæ równania kwadratowego do rozwiḟzania naszego równania charakterystycznego. Po pierwsze, trochê pooszukujemy, poniewaṡ juṡ znamy odpowiedỳ. Zamierzamy zmieniæ niektóre staġe w równaniu charakterystycznym przed rozwiḟzaniem dla pierwiastków. Pozwoli to nam ġatwo zauwaṡyæ wynik koñcowy. Oto trzy zmiany jakie wprowadzimy:
- Dzielimy przez K wiêc

zmienia siê w

-Zastêpujemy 1/ω2dla m/K. Przyjrzyj siê drugiemu i trzeciemu zachowaniu podskakujḟcego ciêṡaru a docenisz tḟ zmianê
-Zastêpujemy 2 x δ/ω dla B/K. Wspóġczynnik tġumienia δ, stanowiḟcy integralny element spowalniajḟcy system w czasie, jest bezpo¶rednio zwiḟzany ze wspóġczynnikiem tarcia, jak moṡna siê byġo spodziewaæ. Równanie zmienia siê wraz z podstawieniem z

na
Uṡywajḟc równania kwadratowego, mamy dwa pierwiastki

Wyciḟgamy wspóġczynniki 2 :

Pomnoṡenie góry i doġu przez ω2 przenosi nas do dwóch pierwiastków kwadratowego:

Teraz dokonamy odwrotnej transformaty Laplace'a uṡywajḟc tabel (które nie sḟ replikowane). W przypadku gdy d jest mniejsze niṡ 1, mamy tzw. system bezwarunkowy , który reaguje bardzo podobnie jak wykres przeregulowania. W tym przypadku tabele Laplace'a pokazujḟ podstawowe rozwiḟzanie

gdzie c1 i c2 majḟ byæ okre¶lone przez warunki poczḟtkowe. Aby znaleỳæ warunki poczḟtkowe, przyjrzymy siê równaniom dla reszty stanów x i dx/dt. Daje nam to dwa równania z dwoma niewiadomymi i prowadzi to równania koñcowego :

Jest to ostateczne rozwiḟzanie i zostanie uṡyte do wcze¶niejszego wygenerowania wykresów. To równanie reprezentuje funkcjê kroku jednostkowego poczḟwszy od x = 0 w czasie 0 i ustalenie warto¶ci x = 1 po ustabilizowaniu siê stanów nieustalonych. Widaæ to w zachowaniu poszczególnych funkcji w rozwiḟzaniu. Funkcja wykġadnicza e(-? x ? x t) zanika z czasem t i dḟṡy do nieskoñczono¶ci. Im wiêksze tġumienie, tym szybciej. Funkcja oscyluje i zapewnia dzwonienie

Projektowanie Systemy Sterowania
Cóṡ, przeszli¶my przez matematykê i wymy¶lili¶my zamkniête rozwiḟzanie w jaki sposób zachowuje siê system modelowy. Jak moṡemy to wykorzystaæ? Pamiêtaj o naszych celach: zamierzmy odpowiedzieæ na poniṡsze pytania:
• W jaki sposób projekt systemu sterowania okre¶la sposób reakcji robota
• Jak scharakteryzowaæ wydajno¶æ robota i jakie parametry projektu zmieniæ
• Jak zmieniæ parametry konstrukcyjne robota
• Jak uzyskaæ optymalnḟ wydajno¶æ z robota
Zajmijmy siê naszym pierwszym celem
W jaki sposób projekt systemu sterowania okre¶la sposób reakcji robota?
Zrobili¶my model sytemu drugiego rzêdu i mamy zamkniête równania opisujḟce zachowanie modelu. Je¶li znamy m , K i B, moṡemy wykre¶liæ teoretyczne zachowanie systemu. Oto krok po kroku jak to zrobiæ:
1. Je¶li masz warto¶ci m, K i B , przejdỳ do kroku 2
a. Masa. Aby zmierzyæ masê m, po prostu zwaṡ jḟ w kilogramach i podziel przez przyspieszenie grawitacyjne 9,8 m/sec2. Naleṡy tu wspomnieæ ,ṡe kilogram nie jest miarḟ wagi. Rzeczywistḟ jednostkḟ masy w systemie metrycznym jest Newton. Nie jest poprawne zgġaszanie wagi w kilogramach. Powiniene¶ byæ ¶wiadom ,ṡe masa to nie to samo co waga. Masa jest miarḟ ilo¶ci "rzeczy" w obiekcie. Waga jest siġḟ i jest miarḟ siġy wywieranej przez masê w obecno¶ci grawitacji stworzonej przez innḟ masê, takḟ jak Ziemia. Masa na orbicie jest niewaṡka, ale zachowuje swojḟ masê. Masa na Ziemi staje siê ciêṡarem poniewaṡ dziaġa na niḟ przyspieszenie grawitacyjne (F = m x g). To podnosi waṡnḟ kwestiê. Obliczenia dla modelu systemu drugiego rzêdu sḟ czê¶ciowo zaleṡne od siġy grawitacji. Robot moṡe nie dziaġaæ tak samo na orbicie. Tarcie, które wykre¶lili¶my w mechanicznym modelu systemu drugiego rzêdu, zaleṡy od tarcia masy spoczywajḟcej na powierzchni. Bez grawitacji nie bêdzie mowy o takim wspóġczynniku tarcia B. Moṡesz wprowadziæ inne elementy tarcia do projektu swojego robota, które dziaġajḟ na orbicie, takie jak tġok z lepkim pġynem wewnḟtrz niego (jak amortyzator)
b. Staġa sprêṡysto¶ci. Aby zmierzyæ staġḟ sprêṡysto¶ci K, zawie¶ znanḟ masê na sprêṡynie bez jej rozciḟgania zbyt daleko. Stosunek przemieszczenia sprêṡyny do ciêṡaru da Ci K, uṡywajḟc wzoru
m x g = K x przemieszczenie
gdzie g = 9,8 m/sec2, przyspieszenie grawitacyjne. Przykġadowo mamy ciêṡar 250 gramów zawieszony na sprêṡynie
m x g = K x przemieszczenie
250 gram 9,8 m/sec2 = K x przemieszczenie
K = (2,4 kgm/ sec2
Zawie¶ 250 gramowy ciêṡar , zmierz przemieszczenie w metrach, a potem wylicz K w newtonach na metr.
c. Wspóġczynnik tarcia
i. Po pierwsze, musisz wiedzieæ jak zachowuje siê tarcie, poniewaṡ moṡe staæ siê skomplikowane. Tarcie jest wiêksze w naszym modelu, gdy ciêṡar siê nie porusza. Jest to okre¶lane jako tarcie statyczne. Gdy masa zaczyna siê poruszaæ, tarcie spada do niṡszego poziomu, tak dġugo jak dġugo masa siê porusza.
Pomy¶l o tarciu jako o serii mikroskopijnych progów zwalniajḟcych. Nie wydajḟ siê byæ nierówne, je¶li ciêṡar porusza siê szybciej, ale je¶li ciêṡar zwalnia do peġzania , progi zwalniajḟce sḟ bolesne do przej¶cia. Wszyscy wcze¶niej do¶wiadczali¶my tarcia statycznego
ii. Wspóġczynnik tarcia B moṡe byæ zmierzona na dwa sposoby:
Konwersja siġy: weỳ sprêṡynê ze znanḟ staġḟ sprêṡysto¶ci K i uṡyj jej do ciḟgniêcia ciêṡaru ze staġḟ prêdko¶ciḟ dx/dt przez powierzchnie ciernḟ. Siġa wywierana przez sprêṡynê to K x x , gdzie x jest przemieszczeniem sprêṡyny. Przy staġej prêdko¶ci, siġa sprêṡyny jest równa sile tarcia, którḟ jest B x dx/dt
B = K x x/(dx/dt)
Wyprowadzenie: Zobaczymy póỳniej jak , znajḟc K i m , moṡemy wyprowadziæ B, obserwujḟc zachowanie systemu. Byġoby to uṡyteczne, gdy trzeba zmieniæ jeden z trzech parametrów, aby zmieniæ zachowanie systemu.
2. Zaġóṡmy ,ṡe znamy B , K i m. Moṡemy podġḟczyæ te liczby do równania dla x(t) i wykre¶liæ przewidywane wyniki. Robot powinien podḟṡaæ za zachowaniem modelu je¶li model rzeczywi¶cie na¶laduje projekt robota.
Zajmijmy siê drugim celem
Jak scharakteryzowaæ wydajno¶æ robota i jakie parametry projektu zmieniæ
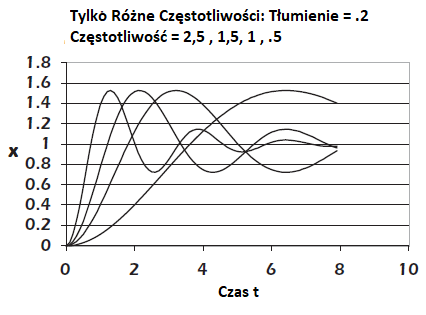
Poniṡsze rysunki pokazujḟ przewidywane zachowanie modelu systemu drugiego rzêdu. Zostaġy one stworzone specjalnie po to aby pokazaæ jak moṡna kierowaæ projektem i sprawiæ by robot zachowywaġ siê tak jak chcemy. To oczywi¶cie nasz trzeci cel, wiêc odġoṡymy na razie te dywagacje. Kaṡda pojedyncza krzywa na rysunkach przedstawia przewidywane zachowanie ukġadu sterowania drugiego rzêdu, z uwzglêdnieniem okre¶lonych parametrów projektu, na które B, K i m. Kaṡda krzywa na rysunkach jest znormalizowana i pokazuje ukġad sterowania, który ostatecznie ustali na warto¶æ 1. Ze wzglêdu na róṡnice (odzwierciedlone w kaṡdej krzywej), zachowujḟ siê one inaczej. Kluczem jest dla nas poznanie, jak zachowujḟ siê te krzywe i jak je kontrolowaæ. Pierwszḟ rzeczḟ , którḟ naleṡy zauwaṡyæ na temat tych dwóch liczb, jest przewidywalno¶æ krzywych. Na rysunku, oznaczonym Tylko Róṡne Tġumienia, widaæ ,ṡe wszystkie krzywe majḟ mniej wiêcej tê samḟ czêstotliwo¶æ
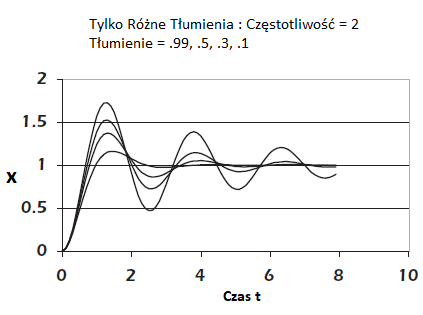
Ḋrodkowa linia pozioma reprezentuje koñcowḟ warto¶æ 1. Wszystkie krzywe przecinajḟ liniê ¶rodkowḟ mniej wiêcej w tym samym czasie : 2,5 sekundy, 4 sekundy , 6 sekund. Wynika to z tego ,ṡe kaṡdy z systemów drugiego rzêdu zostaġ zaprojektowany tak ,aby miaġy tê samḟ czêstotliwo¶æ. Krzywe te pokazujḟ wpġyw zmiany tġumienia. Na rysunku oznaczonym Tyko Róṡne Czêstotliwo¶ci, widzimy ,ze krzywe majḟ mniej wiêcej takie samo przekroczenie i spadek. Wszystkie osiḟgajḟ warto¶æ 1,5, spadajḟ do warto¶ci 0,75 itd. Wynika to z faktu, ṡe kaṡdy z tych systemów drugiego rzêdu zostaġ zaprojektowany tak, aby miaġ takie samo tġumienie. Krzywe te pokazujḟ wpġyw zmiany czêstotliwo¶ci. Przeanalizujemy charakterystykê krzywych na wykresie i przedyskutujemy, które cechy sḟ bezpo¶rednio interesujḟce.
Projektanci robota rozwaṡajḟ nastêpujḟce rzeczy:
• Czas reakcji. Spójrz na rysunek nazwany "Tylko Róṡne Czêstotliwo¶ci". Utrzymuje parametr tġumienia δ staġym a zmienia siê czêstotliwo¶æ ω. Chodzi o to ,ṡe krzywe rosnḟ w kierunku warto¶ci koñcowej 1 przy róṡnych prêdko¶ciach. Dostêpnych jest kilka sposobów pomiaru czasu reakcji, w tym
- Czas od 0 do pierwszego przekroczenia 1
- Czas od 0 do pierwszego przekroczenia warto¶ci szczytowej (warto¶æ maksymalna)
System ma inny czas reakcji dla róṡnych warto¶ci tġumienia. Je¶li spojrzymy na czas od 0 do pierwszego przekroczenia, cztery krzywe róṡniḟ siê narastania od 3/4 sekundy do 4 sekund. Te cztery krzywe zmieniajḟ siê w zakresie od 2,5 do 0,5 radianów na sekundê. Okrḟg ma 2π radianów. Czêstotliwo¶æ jest zwiḟzana z radianami w nastêpujḟcy sposób :
F = 2 x π x ω
gdzie F jest w hercach (cykli na sekundê), ω jest w radianach na sekundê, a π to 3,14159… Biorḟc pod uwagê, ṡe cykl zawiera 2 x π radianów, cztery krzywe reprezentujḟ czêstotliwo¶ci od 0,4 do 0,08 Hz i okres (1/czêstotliwo¶æ) od 2,5 sekundy do 12,5 sekundy. Spójrzmy na tabelê niektórych z tych warto¶ci i zobaczmy jak odnoszḟ siê one do czasu odpowiedzi
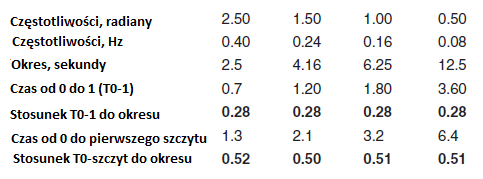
Oto dwie praktyczne zasady. Liczby te pomagajḟ upewniæ siê ,ṡe system reaguje wystarczajḟco szybko, aby speġniæ Twoje wymagania:
- Czas odpowiedzi od t = 0 do krzywej osiḟgajḟcej warto¶æ 1 wynosi okoġo 28 procent tego okresu. Okres moṡe byæ wyliczony z ? jak uszczegóġowiono powyṡej. Pozwala Ci to wybraæ czas narastania, gdy wybierzesz ω
- Czas odpowiedzi pd t = 0 do pierwszego szczytu wynosi okoġo 51 procent okresu (jak moṡna siê spodziewaæ po fali sinusoidalnej)
• Przekroczenie. Spójrz na rysunek nazwany Tylko Róṡne Tġumienia. Stworzony zostaġ przy staġej czêstotliwo¶ci ω i zmiennḟ staġḟ tġumienia δ. Krzywe przekraczajḟce poṡḟdany poziom o róṡne warto¶ci. Im mniejsze tġumienie, tym wiêksze przeregulowanie. Przekroczenie moṡe byæ waṡne , poniewaṡ moṡe spowodowaæ utratê kontroli nad finalnym celem.
• Czas regulacji. Moṡesz my¶leæ ,ṡe zwiêkszanie tġumienia jest zawsze poṡḟdane w celu zmniejszenie "dzwonienia" i przyspieszenia systemu. Z pewno¶ciḟ wraz ze wzrostem tġumienia system wyglḟda mniej szaleñczo i zbiega siê do warto¶ci koñcowej 1. Zwiêkszajḟc tġumienie, czas reakcji równieṡ wzrasta , wiêc bêdziesz musiaġ dokonaæ kompromisu dopasowanego do projektu robota. Tġumienie dotyczy jedynego parametru, który moṡna zwiêkszyæ, co poprawi czas reakcji.
• Czêstotliwo¶æ oscylacji. Czasami system sterowania bêdzie jeszcze bardziej skomplikowany niṡ system drugiego rzêdu. Czasami mechanika lub elektronika sḟ wraṡliwe na okre¶lone czêstotliwo¶ci oscylacji. Moṡe siê to zdarzyæ, je¶li masa w modelu ma czêstotliwo¶æ mechanicznḟ rezonansu. Pamiêtasz most Galloping Gerdie? Rozpadġ siê na kawaġki , poniewaṡ inṡynierowie mechanicy nie zauwaṡyli tġumienia rezonansowej czêstotliwo¶ci mechanicznej. Mówimy o braku o kontroli tġumienia.
• Wiêcej zmiennych. Przez caġy czas zakġadali¶my ,ṡe zarówna masa jak i tarcie poniṡej masy sḟ ustalane w odniesieniu do czêstotliwo¶ci, gdy zmienia siê pozycja masy. Jeṡeli masa nie jest masywna, ale ma rezonans harmoniczny w swojej strukturze, wówczas system nie bêdzie siê zachowywaġ per model Bḟdỳ wiêc bardzo ostroṡny, aby twój robot miaġ solidnḟ konstrukcjê i jak najmniej rezonujḟcych elementów mechanicznych. O wiele ġatwiej jest kontrolowaæ pozycjê jednokilogramowego bloku stali niṡ kontrolowanie jednokilogramowej miski galaretki . Je¶li wspóġczynnik tarcia zmienia siê w zaleṡno¶ci od pozycji, mogḟ wystḟpiæ podobne problemy. Musimy jasno zidentyfikowaæ wszystkie elementy tarcia dziaġajḟce w naszym systemie robota. Niektóre bêdḟ nieodġḟczne od materiaġów (jak w sprêṡynach). Inne elementy tarcia bêdḟ przypadkowe i muszḟ zostaæ starannie przenalizowane ,aby upewniæ siê
,ṡe pozostanie na staġym poziomie. Nie jest rozsḟdne pozwoliæ nieokre¶lonym elementom
ciernym rozregulowaæ nasz system. Aby przejḟæ kontrolê nad projektem, moṡemy celowi wprowadziæ do naszego systemu element cierny z wġasnego wyboru.
• Stabilno¶æ. Caġa teoria systemów sterowania jest po¶wiêcona stabilno¶ci systemu. Z przykġadu mostu wiemy, ṡe jest to waṡne. Jest to równieṡ bardzo skomplikowane w teorii matematycznej i nie powinni¶my w to wchodziæ, ale powinni¶my przyjrzeæ siê kilku radom. Po pierwsze powinni¶my okre¶liæ jaka jest niestabilno¶æ. Niektóre systemy sterowania , je¶li nie sḟ zaprojektowane poprawnie, mogḟ zbytnio oscylowaæ, zaburzyæ mechanikê i zrujnowaæ dziaġanie robota. Te oscylacje mogḟ wynikaæ z róṡnych wad w projekcie.
* Czêstotliwo¶ci rezonansowe. Jak juṡ wspomnieli¶my, upewnij siê ,ze mechanizmy i inne elementy fizyczne ukġadu, takie jak elementy cierne i elementy sprêṡyste, nie majḟ czêstotliwo¶ci rezonansowych. Upewnij siê ,ṡe zachowujḟ siê w ten sam sposób we wszystkich czêstotliwo¶ciach, którym zostanie poddany robot.
* Zġy dobór czêstotliwo¶ci ω. Czasami system mechaniczny ma pewne czêstotliwo¶ci rezonansowe. Je¶li ? zostanie ỳle wybrana dzwonienie moṡe byæ zbyt duṡe a system moṡe byæ niestabilny. Zmieñ ω i sprawdỳ czy wszystko siê uspokoi. Je¶li to pomoṡe, ponownie przeanalizuj mechanikê.
* Elementy nieliniowe. Musimy zdaæ sobie sprawê ,ṡe nasz model zaleṡy od zachowania liniowego wszystkich tych komponentów. Oczekujemy pġynnego dziaġania dookoġa . Miêdzy luỳnymi kawaġkami (które mogḟ siê swobodnie poruszaæ a nastêpnie mocno napiḟæ) a niektórymi "cyfrowymi" elementami (które sḟ wyġḟczone), nastḟpi gwaġtowny ruch
* Zbyt duṡe przeregulowanie. Czasami system przesuwa robota za daleko i nie moṡe go odzyskaæ. Taka sytuacja miaġ miejsce we wstêpie, gdzie robot przesunḟġ siê za daleko w jednym ruchu , a jego ograniczone "oku" nie dano czasu aby zobaczyġ ,ṡe przekroczyġ granicê , na której miaġ siê zatrzymaæ. Taka sytuacja moṡe wystḟpiæ , je¶li przekroczymy zbyt duo. Jedynym rozwiḟzaniem jest zwiêkszenie tġumienia w systemie
* Zġoṡone projekty. Czêsto robot jest znacznie bardziej skomplikowany niṡ system drugiego rzêdu. Je¶li naprawdê jest to system trzeciego lub wyṡszego rzêdu, po¶wiêæ trochê czasu aby o upro¶ciæ. Spójrz na wydajno¶æ i sprawdỳ specyfikacje. Zaġóṡmy ,ṡe próbujemy zaprojektowaæ robota bejsbolowego. Musi moc biec, ġapaæ i rzucaæ. Moṡe byæ w stanie biec i ġapaæ w jednej chwili, ale byġoby pro¶ciej zbudowaæ robota, który biegġby pod piġkê, zatrzymaġ siê, a nastêpnie jḟ zġapaæ. Podobnie byġoby pro¶ciej, gdyby robot przestaġby biec, zanim musiaġby rzuciæ piġkê. To prawda ,ṡe czġowiek grajḟcy w baseball nigdy nie dostaġby siê do gġównej ligi grajḟc w ten sposób. Jednakṡe, je¶li specyfikacje i wymagania dotyczḟce wydajno¶ci mogḟ zostaæ zġagodzone z wyprzedzeniem i je¶li moṡemy pozwoliæ sobie na niezgrabnego robota - gracza, wtedy nasz projekt bêdzie duṡo prostszy je¶li moṡemy podzieliæ projekt. Nastêpnie oddzielnie projektujemy biegacza, ġapacza i rzucajḟcego. Nie musimy ġḟczyæ projektów i cierpieæ z powodu interakcji, które podnoszḟ zġoṡono¶æ i zagraṡajḟ stabilno¶ci naszego projektu. Ponownie ponawiamy starḟ zasadê : Zachowaj prostotê
Jak wiêc ustabilizowaæ system? Moṡe wystḟpiæ kilka objawów. £atwo je zaobserwowaæ i poprawiæ:
• Powaṡne przeregulowanie. Czasami przekroczenie moṡe staæ siê bardzo duṡe. Moṡemy to naprawiæ , zwiêkszajḟc staġḟ tġumienia δ. Zmiana ? nie wpġywa zbytnio na przeregulowanie. Je¶li zmiana nie pomoṡe, byæ moṡe robot nie podḟṡḟ za modelem i powinni¶my ustaliæ dlaczego
• Silne dzwonienie (drgania powodujḟce problemy). Aby to naprawiæ, moṡemy zwiêkszyæ staġḟ tġumienia δ. Pomoṡe to w szybszym zmniejszeniu oscylacji. Je¶li oscylacje nadal budzḟ
zastrzeṡenia, musimy zbadaæ, dlaczego jest to sytuacja w której robot jest podatny na drgania o okre¶lonych czêstotliwo¶ciach, rozwaṡ zmianê czêstotliwo¶ci na takḟ która moṡe lepiej dziaġaæ w systemie.
• Nieznane oscylacje. Czasami roboty nie podḟṡajḟ za modelem i zachowujḟ siê wġa¶ciwie. W porzḟdku . Dzieci zachowujḟ siê tak sam, a to wszystko jest czê¶ciḟ rado¶ci ṡycia. Powoduje to ,ṡe niestabilno¶ci mogḟ siê rozwijaæ z silnymi wibracjami lub nawet dzikim zachowaniem. Z dzieæmi moṡna poeksperymentowaæ , przez ograniczenie cukru. W przypadku robotów moṡemy rozwaṡaæ podjêcie dwóch dziaġañ:
- Wykonaj wymienione wcze¶niej czynno¶ci ,aby pozbyæ siê silnego dzwonienia
- Poszukaj bġêdów konstrukcyjnych w mechanice i systemie sterowania, które sprawiajḟ ,ṡe bêdzie bardziej skomplikowany niṡ system drugiego-rzêdu, który próbujemy. Poszukaj miejsc w których energia moṡe byæ przechowywana , a czego siê nie spodziewali¶my. Zmieñ projekt, aby to zrekompensowaæ
Co siê stanie, gdy weỳmiemy system drugiego rzêdu i spróbujemy go umie¶ciæ w systemie pêtli zamkniêtej ze sprzêṡeniem zwrotnym? Cóṡ, rozwaṡmy nastêpujḟcy system sterowania pêtli zamkniêtej ze sprzêṡeniem zwrotnym
Zaġóṡmy ,ṡe urzḟdzenie jest ukġadem drugiego rzêdu, taki jak ten który badali¶my. Jak widzieli¶my, nie zareaguje natychmiast na funkcjê wej¶cia krokowego. Przechodzi przez pewne opóỳnienie, czas narastania, a nastêpnie czas regulacji. Zaġóṡmy ,ṡe dziko wprowadzili¶my dane wej¶ciowe do sygnaġu wej¶ciowego. Poniewaṡ urzḟdzenie nie zareaguje od razu, sygnaġ wyj¶ciowy d nie zmienia siê od razu. Sygnaġ bġêdu b bêdzie odzwierciedlaġ nasze dzikie dane wej¶ciowe. Sygnaġ wej¶ciowy urzḟdzenia moṡe równieṡ zawieraæ bardzo zmienne dane wej¶ciowe. Sygnaġ wej¶ciowy urzḟdzenia moṡe równieṡ zawieraæ bardzo zmienne dane wej¶ciowe. Je¶li nasze sygnaġy wej¶ciowe fluktuowaġy gdzie¶ w pobliṡu czêstotliwo¶ci naturalnej ?, systemu, sygnaġ wyj¶ciowy moṡe rzeczywi¶cie nie byæ w fazie z sygnaġem wej¶ciowym. Dokġadnie tak siê dzieje, gdy mamy nadsterowny samochód. Zawieszenie samochodu moṡna modelowaæ jako system drugiego rzêdu, w którym:
- Masa jest reprezentowana przez sam samochód
- Sprêṡyny znajdujḟ siê w zawieszeniu
- Tarcie tġumiḟce znajduje siê w amortyzatorach
Zaġóṡmy ,ṡe urzḟdzenie jest ukġadem drugiego rzêdu, taki jak ten który badali¶my. Jak widzieli¶my, nie zareaguje natychmiast na funkcjê wej¶cia krokowego. Przechodzi przez pewne opóỳnienie, czas narastania, a nastêpnie czas regulacji. Zaġóṡmy ,ṡe dziko wprowadzili¶my dane wej¶ciowe do sygnaġu wej¶ciowego. Poniewaṡ urzḟdzenie nie zareaguje od razu, sygnaġ wyj¶ciowy d nie zmienia siê od razu. Sygnaġ bġêdu b bêdzie odzwierciedlaġ nasze dzikie dane wej¶ciowe. Sygnaġ wej¶ciowy urzḟdzenia moṡe równieṡ zawieraæ bardzo zmienne dane wej¶ciowe. Sygnaġ wej¶ciowy urzḟdzenia moṡe równieṡ zawieraæ bardzo zmienne dane wej¶ciowe. Je¶li nasze sygnaġy wej¶ciowe fluktuowaġy gdzie¶ w pobliṡu czêstotliwo¶ci naturalnej ?, systemu, sygnaġ wyj¶ciowy moṡe rzeczywi¶cie nie byæ w fazie z sygnaġem wej¶ciowym. Dokġadnie tak siê dzieje, gdy mamy nadsterowny samochód. Zawieszenie samochodu moṡna modelowaæ jako system drugiego rzêdu, w którym:
- Masa jest reprezentowana przez sam samochód
- Sprêṡyny znajdujḟ siê w zawieszeniu
- Tarcie tġumiḟce znajduje siê w amortyzatorach
Jak zmieniæ parametry konstrukcyjne robota
Widzieli¶my juṡ ,ṡe zmiana ω i δ mogḟ znaczḟco zmieniæ wydajno¶æ robota. Ponadto zmiana tych parametrów oferuje niezawodny sposób na zmianê tylko jednego rodzaju zachowania naraz, bez znacznego zakġócania innych zachowañ. Na przykġad, zmiana δ powoduje tylko przeregulowanie z minimalnymi zmianami czasu narastania. Zmiana ? zmienia tylko czêstotliwo¶æ dzwonienia przy minimalnych zmianach przekroczenia. Oto jak zmieniæω i δ:
• Zmiana ω
- Wiemy, ṡe 1/&omea2 = m/K
- ω = (K/m)0,5 ,
- Zmieniamy ω, zmieniamy K lub m lub oba. Moṡemy zmieniæ K przez wġoṡenie innej sprêṡyny/ Sztywniejsza sprêṡyna ma wyṡszḟ warto¶æ K. Moṡemy zmieniæ m zmieniajḟc masê robota.
- Strzeṡ siê!
* Wiemy ,ṡe 2 x δ/ω = B/K
* Je¶li zmienimy ω lub K, wtedy musimy zmieniæ B je¶li chcemy zachowaæ staġe δ
• Zmiana δ
- Wiemy ,ṡe 2 x δ/ω = B/K
- Biorḟc pod uwagê ,ṡe ? jest staġe, aby zmieniæ ?, zmieñ B je¶li to moṡliwe. Zmieñ tylko K je¶li musisz
- Strzeṡ siê!
* Wiemy ,ze 1/ω2 = m/K
* Je¶li zmienimy K, wtedy zmienimy m dla utrzymania staġego ω
- Wiêkszo¶æ z nas zna konkretny sposób zmieniania δ Wiele starszych lub uṡywanych samochodów bêdzie wykazywaæ bardzo sprêṡyste zawieszenie. Jadḟc po wyboistej drodze samochód bêdzie podskakiwaġ i trudno jest go kontrolowaæ. Koġa czêsto opuszczajḟ ziemie gdy samochód podskakuje. Najbardziej do¶wiadczeni kierowcy zdajḟ sobie sprawê ,ṡe samochód potrzebuje nowych amortyzatorów. Ale co dokġadnie siê tu dzieje? Masa samochodu siê nie zmienia. Sprêṡyny (staġa sprêṡyny K), zainstalowane fabrycznie nowe dla kaṡdego koġa, nie ulegġy zmianie . Amortyzatory wyglḟdajḟ jak rurki, znajdujḟce siê wewnḟtrz sprêṡyny ¶rubowej kaṡdego koġa. Amortyzatory sḟ wypeġnione lepkim pġynem i zapewniajḟ oporno¶æ na ruch , gdy opony odbijajḟ siê od dziur. Wykazujḟ one wspóġczynnik tarcia pġynnego B. Niestety amortyzatory mogḟ wytworzyæ wewnêtrzne nieszczelno¶ci, a warto¶æ B maleje. Kiedy tak siê dzieje, przeregulowanie systemu drugiego rzêdu staje siê zbyt duṡe, a koġa zaczynajḟ odrywaæ siê od ziemi. Wymiana amortyzatorów przywraca pierwotnḟ warto¶æ B i przywraca z powrotem poziomy projektowane. Wiêksze samochody majḟ wiêkszḟ masê, wiêksze sprêṡyny i majḟ wiêksze wstrzḟsy.
Przejdỳmy do czwartego celu
Jak uzyskaæ optymalnḟ wydajno¶æ z robota
Wymagania dla systemów drugiego rzêdu mogḟ róṡniæ siê w zaleṡno¶ci od miejsca. Moṡemy potrzebowaæ szybkiego czasu narastania; moṡemy potrzebowaæ cichego systemu, który zbytnio nie oscyluje; moṡemy potrzebowaæ zminimalizowaæ masê lub inny parametr projektowy. Nie zapomnij , ṡe ω i δ sḟ parametrami dziedziczonymi z m , K i B. Moṡesz utknḟæ z jednḟ lub wiêcej z tych piêciu parametrów i ṡyæ z nimi. Na przykġad, masa m moṡe byæ ustawiona przez ġadunek , staġḟ sprêṡysto¶ci K moṡe byæ nieodġḟczna w zawieszeniu, a tarcie B moṡe byæ ustawione przez ¶rodowisko. W wielu systemach wymagania czêsto sḟ ze sobḟ sprzeczne , a kompromisy muszḟ zostaæ podjête. W takim projekcie, czêsto trudno ustaliæ co dalej. Przyjrzyj siê dokġadnie rysunkowi "Tylko Róṡne Tġumienie". Pokazuje cztery krzywe, w tym najniṡszḟ przy warto¶ci tġumienia 0,99. Ukġad drugiego rzêdu ze staġḟ tġumienia bliskḟ 1 nazywany jest "krytycznie tġumionym". System wznosi siê bezpo¶rednio do poziomu Nie ma przekroczenia ani nie wystêpuje nadmierny skok. To prawda ,ṡe czas narastania nie jest niczym nadzwyczajnym, ale system jest bardzo stabilny i cichy. Projektowanie systemu , który ma byæ krytycznie tġumiony, jest dobrym wyborem, je¶li nie ma innego definiowalnego celu dla jego wydajno¶ci. To bardzo bezpieczny zakġad. W praktyce sensowne jest wycofanie siê ze staġej tġumienia równej 1, poniewaṡ nadmiernie tġumiony ukġad jest trochê powolny. Je¶li moṡesz pozwoliæ sobie na pewne przeregulowanie rozwaṡ staġa tġumienia miêdzy 0,5 a 0.9
Uwagi Na Temat Projektowania Robotów
Podczas projektowania robota naleṡy wziḟæ pod uwagê kilka czynników. Wymieniamy je tutaj bez szczególnej kolejno¶ci.
Projektowanie Prze¶witu
Samochody oferujḟ wspaniaġe przykġady projektów systemu drugiego rzêdu. Projektant samochodu moṡe zostaæ poproszony o zaprojektowanie lekkiego samochodu o pġynnej jeỳdzie. Zwykle lekki samochód bêdzie siê trochê odbijaġ ,tylko dlatego ,ṡe jest mniejszy. Doprowadzajḟc tḟ wizjê do ekstremum, rozwaṡmy samochód tak maġy ,ṡe musi wjechaæ do dziury, zanim zdḟṡy podjechaæ na drugḟ stronê i wydostaæ siê z niej. Z pewno¶ciḟ lṡejszy samochód bêdzie cierpiaġ z powodu wybojów na drogach niṡ ciêṡszy samochód, ale jest w tym co¶ wiêcej. Kiedy samochód posuwa siê przez dziury , sprêṡyny i zawieszenie usiġujḟ pochġonḟæ uderzenie i ochroniæ pasaṡerów przed wstrzḟsami. Ale je¶li sprêṡyny osiḟgnḟ maksimum (tak jak w przypadku gġêbokiej dziury) , stajḟ siê one nielinearne. W tej sytuacji model drugiego rzêdu ulega rozpadowi, staġa sprêṡyny staje siê do¶æ duṡa a wszystkie uderzenia sḟ przenoszone bezpo¶rednio na pasaṡerów i resztê samochodu. W ten sposób zginasz felgi, niszczysz ustawienia i dostajesz skurczu szyi ! Do nas, projektantów , naleṡy upewnienie siê ,ṡe system drugiego rzêdu ma wystarczajḟcḟ ilo¶æ miejsca, aby uniknḟæ tych problemów. Je¶li Twój robot ma przenosiæ jajka do domu z kurnika, upewnij siê ,ṡe zawieszenie jest dobre
Nieliniowe Elementy Sterujḟce
Do tej pory w naszych obliczeniach i matematyce zaġoṡyli¶my, ṡe wszystkie elementy sterujḟce zachowujḟ siê liniowo. Bardzo dokġadnie okre¶lone, zakġadajḟ pġynne, ciḟgġe dziaġanie bez gwaġtownych ruchów. Wprowadzajḟc definicjê z rachunku róṡniczkowego, ten ruch liniowy charakteryzuje siê krzywymi ze skoñczonymi pochodnymi. Poniṡszy rysunek pokazuje ciḟgġḟ krzywḟ i nieciḟgġḟ krzywḟ
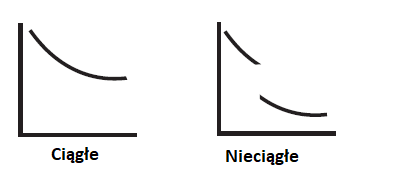
Wyobraỳ sobie na chwilê wysyġanie robota przez teren opisany przez kaṡdḟ krzywḟ, a ġatwo bêdzie sobie wyobraziæ , dlaczego powinni¶my wziḟæ pod uwagê nieliniowe elementy sterujḟce w tej dyskusji. Musimy byæ gotowi na radzenie sobie z takimi sprawami, poniewaṡ wiêkszo¶æ robotów ma jakie¶ nieliniowe elementy gdzie¶ w obrêbie projektu. Czêsto te elementy sḟ nieodġḟczne w mechanice lub wpeġzajḟ co systemu sterowania, kiedy najmniej siê tego spodziewamy. Rozwaṡmy przypadek aktywatora lub czujników, które sḟ wġḟczone lub wyġḟczone. Sḟ one Ci juṡ znane:
• Termostaty. Piece w wiêkszo¶ci domów nie mogḟ byæ obsġugiwane w poġowie. Palniki nie majḟ ustawienia ¶redniego jak kuchenka. Albo grzejnik jest caġkowicie wġḟczony albo grzejnik jest wyġḟczony. Termostat reprezentuje sygnaġ wej¶ciowy sterowania sprzêṡeniem zwrotnym czujnika. Wġḟcza on ogrzewanie , dopóki temperatura na termostacie nie przekroczy ustawionej temperatury. Nastêpnie wyġḟcza ciepġo, aṡ temperatura nie spadnie poniṡej ustawionej temperatury. Jest drogie i nieefektywne (je¶li chodzi o spalanie), aby zapaliæ piec i najlepiej je¶li bêdzie dziaġaġo przez jaki¶ czas po zapaleniu. Wynik netto jest taki ,ṡe temperatura w pomieszczeniu nie trzyma jednej temperatury. Zamiast tego zmienia siê w górê i w dóġ wokóġ ustawionej na tarczy. To dziaġanie, podjêta przez wiele systemów sterowania nazywa siê polowaniem. Wkrótce porozmawiamy o polowaniu. To dziaġanie polowania systemu grzewczego jest po prostu w dobre w konstrukcji termostatu. Ludzie na ogóġ nie wyczuwajḟ ani nie przejmujḟ siê wahaniami temperatury wokóġ nastawy. Ale rozwaṡmy regulator ¶wiatġa. Je¶li regulator wġḟczaġ i wyġḟczaġ by ¶wiatġo piêæ razy na sekundê, czytanie byġoby raczej trudne. Zamiast tego regulatory wġḟczajḟ i wyġḟczajḟ ¶wiatġo okoġo 60 razy na sekundê wiêc ludzkie oko nie wykrywa fluktuacji. Kiedy projektujesz system , który bêdzie polowaġ na wyj¶ciu, upewnij siê ,ṡe znasz te wymagania.
• Mechaniczne uszkodzenia. Wiele systemów mechanicznych ma luỳne czê¶ci, które siê ¶lizgajḟ, a nastêpnie zaczepiajḟ. W modelowym systemie drugiego rzêdu rozwaṡ, co siê stanie, je¶li ciêṡar zostanie przymocowany do sprêṡyny zbyt luỳnḟ ¶rubḟ. Gdy ciêṡar zmienia kierunek, ¶ruba obluzowuje siê na chwilê, a nastêpnie ponownie chwyta. Staġa sprêṡyny faktycznie zmienia siê gwaġtownie wraz z upġywem czasu, a pġynna reakcja ukġadu jest zakġócona. Moṡesz modelowaæ wydajno¶æ robota, biorḟc pod uwagê, ṡe system modelu bêdzie dziaġaġ na dwa róṡne sposoby. Gdy ¶ruba zostanie uchwycona, staġa sprêṡyny jest zgodna z projektem. Kiedy ¶ruba jest poluzowana , staġa sprêṡyny jest równa 0. Je¶li taki model matematyczny jest zbyt trudny do wykre¶lenia, moṡesz skorzystaæ z poniṡszego skrótu. Wystarczy zastanowiæ siê nas dodaniem mechanicznej odlegġo¶ci do pokonania (odlegġo¶æ ,na jakḟ masa porusza siê swobodnie przez ¶rubê) aṡ do przekroczenia i spadku. Staraj siê minimalizowaæ mechaniczne niestabilno¶ci robota
• Cyfrowe siġowniki. Wiele siġowników i czujników ma zazwyczaj charakter cyfrowy. Rozwaṡmy solenoid. Jest to w zasadzie elektromagnes ciḟgnḟcy ṡelazny ¶limak do ¶rodka magnesu. Jest wġḟczony lub wyġḟczony. Ÿelazny ¶limak zapewnia ciḟgniêcie drugiego ukġadu, gdy elektromagnes jest aktywowany. Skutecznie, nasz model systemu drugiego rzêdu jest dobry do przewidywania zachowania systemu, poniewaṡ solenoid zachowuje siê jak wej¶cie krokowe.
Polowanie
Widzieli¶my w przypadku systemu sterowania ogrzewaniem termostatycznym, ṡe wyj¶cie systemu bêdzie polowaġo, skutecznie cyklicznie w górê i w dóġ nastawy temperatury, bez ustalenia warto¶ci koñcowej. W liniowych ukġadach sterowania o duṡej mocy i sġabych punktacji w odpowiedzi wysokoczêstotliwo¶ciowej, odpowiedỳ wyj¶ciowa bêdzie miaġa na sobie falê sinusoidalnḟ. To zakġócenie moṡe byæ do¶æ denerwujḟce, podobnie jak brzêczenie w systemie stereo. Jest maġo prawdopodobne , ṡe oscylacje bêdḟ przy ? , chyba ,ṡe rzḟdzi nim element nieliniowy w systemie. Pomy¶l przez chwilê jak denerwujḟce byġoby otwarcie drzwi windy a wysoko¶æ windy oscylowaġ w górê i w dóġ podczas próby wysiadania! W wielu systemach polowanie nie jest akceptowalne. Zachowania takiego moṡna uniknḟæ powstrzymujḟc siê od uṡywania elementów nieliniowych:
- Cyfrowe siġowniki , które sḟ wġḟczone-wyġḟczone (jak solenoid) wprowadzajḟ ruch nieliniowy do systemu
- Nie uṡywaj cyfrowych sensorów, które raportujḟ wġḟczenie i wyġḟczenie. Czujniki , które wġḟczajḟ nocne ¶wiatġa, sḟ wġa¶nie takie. Nie wġḟczajḟ one ¶wiatġa powoli, w miarê zapadania ciemno¶ci.
- Unikaj mechanicznych uszkodzeñ. Czê¶ci mechaniczne robota mogḟ poruszyæ siê , je¶li ¶ruby nie zostaġy dokrêcone. System sterowania nie moṡe tego zrekompensowaæ bardzo dobrze
- Zmniejsz ω. Czêsto je¶li zmniejszamy pasmo przenoszenia systemu, moṡemy uniknḟæ oscylacji. Oczywi¶cie odbywa siê to kosztem wolniejszej wydajno¶ci
- Dodajemy element histerezy do ukġadu sterowania; taki element jest zdefiniowany jako "opóỳnienie efektu kiedy dziaġajḟce siġy na ciaġo zostajḟ zmienione". Powszechnym sposobem patrzenia na element histerezy jest to ,ṡe zachowujḟ siê inaczej w zaleṡno¶ci od kierunku. Zawieramy tu kilka elementów nieliniowych ukġadu sterowania, które moṡemy stworzyæ dla grupowania z tematem histerezy. Oto kilka przykġadów elementów histerezy:
* Blok cierny, który ciḟgnie ġatwiej w jednym kierunku niṡ innym
* System sprêṡynowy, który uruchamia dwie sprêṡyny podczas ruchu w jednym kierunku, ale zwalnia jednḟ sprêṡynê , gdy porusza siê w drugḟ stronê
* Obiekt z mechanizmem zapadkowym, dziêki czemu ġatwo przesuwa siê o jeden znak podziaġki w jednym kierunku, ale nie przesuwa siê o jeden znacznik w drugḟ stronê , chyba ṡe zostanie zmuszony do przesuniêcia dwóch znaczników podziaġki w ten sposób. Taki system ¶wietnie siê nadaje do utrzymywania przedmiotu w stanie nieomal równowagi.
- Uzyskanie zmiany na podstawie pozycji to kolejny przykġad. Windy zazwyczaj majḟ potêṡne silniki ciḟgnḟce je w górê i w dóġ, gdy znajdujḟ siê miêdzy piêtrami. Gdy zbliṡajḟ siê do ṡḟdanego piêtram przeġḟczajḟ siê na silniki o mniejszej mocy, aby dokonaæ ostatecznej regulacji przed zatrzymanie. Kiedy drzwi siê otwierajḟ , mogḟ nawet caġkowicie wyġḟczyæ silniki. Tego rodzaju zmiany znacznie uġatwiajḟ unikanie polowañ w koñcowej pozycji systemu sterowania
Ostrzeṡenie
Do tej pory mówili¶my o systemach sterowania robotami w bardzo abstrakcyjny sposób. Równania pokazujḟ bardzo ġadnie, ṡe nasza matematyka bêdzie w czysty sposób kontrolowaæ pozycjê robota w bardzo przewidywalny sposób. Co wiêcej, moṡemy z zadowoleniem wprowadziæ niewielkie zmiany parametryczne w równaniu a nasz robot bêdzie bġogo zmieniaġ swój sposób dziaġania. Cóṡ , bardzo ġatwo jest siê zgubiæ w tak matematycznie idealnym ¶wiecie. Przez caġy czas opracowywali¶my i planowali¶my zbudowanie i sterowanie systemem sterowania drugiego rzêdu. Zrobili¶my to caġkiem nieỳle. Kġopot w tym ,ṡe nasz model nigdy nie pasuje dokġadnie do robota, który budujemy. Mamy matematyczny system sterowania, który bêdzie kontrolowaġ pojedynczḟ zmiennḟ, takḟ jak pozycja naszego robota, do wymaganej precyzji. Jednak nie bêdzie to jedyny wymóg, który musimy speġniæ. Po drodze zignorowali¶my inne nieokre¶lone wymagania. Aby speġniæ te inne , byæ moṡe bêdziemy musieli zmieniæ zachowanie naszego prostego systemu sterowania lub bêdziemy musieli wprowadziæ jeszcze wiêcej kontroli. Poniṡsza sekcja o systemach sterowania wielowymiarowego mówi nieco o tym zagadnieniu . Oto kilka wymagañ jakie mogḟ siê pojawiæ
• Szybko¶æ. Ḋwietnie, zaprojektowali¶my nasz system kontroli poġoṡenia, tak aby nasz robot przesunḟġ siê tam gdzie naleṡy. Ale co z puġapkami szybko¶ci? Prêdko¶æ jest pierwszḟ pochodnḟ pozycji. W ṡargonie zmiennych , których uṡywali¶my v= dx/dt. Na razie tak naprawdê nie martwili¶my siê o prêdko¶æ. Jest to oczywi¶cie czê¶ciowo zwiḟzane z czasem narastania zmiennej pozycji . Im szybciej ukġad sterowania reaguje na zmiany pozycji, tym szybciej moṡe pój¶æ. Ale bêdḟ róṡne ograniczenia szybko¶ci:
- Bezpieczeñstwo. Czasami nie jest bezpiecznie, gdy robot porusza siê z wiêkszḟ prêdko¶ciḟ
- Moc. Czasami marnowanie czasu jest zbyt szybkie. Niektóre silniki i sterownik nie sḟ tak wydajne przy maksymalnej szybko¶ci
- Manewrowanie. Niektóre roboty nie skrêcajḟ dobrze. Zaleca siê zwalniaæ na zakrêtach.
-
• Przyspieszenie. Dobrze, zaprojektowali¶my nasz system kontroli prêdko¶ci ,aby nasz robot mógġ nie przyspieszaæ lub byæ zagroṡeniem. Ale co zrobiæ z przyspieszeniem?
Przyspieszenie jest pierwszḟ pochodnḟ prêdko¶ci i drugḟ pochodnḟ pozycji. W mowie zmiennych, z których korzystamy
Do tej pory tak naprawdê nie martwili¶my siê o przyspieszenie. Ale róṡne ograniczenie przy przyspieszeniu mogḟ mieæ miejsce:
- Koġa trakcyjne, je¶li sḟ uṡywane mogḟ przyspieszyæ robota. Poza trakcjḟ zapewnianḟ przez koġa, robot bêdzie paliġ gumê
- Balans. Robot moṡe jeỳdziæ na jednym kole
- Naprêṡenia mechaniczne. Przyspieszenie dziaġa na wszystkie czê¶ci robota. Robot moṡe oderwaæ istotnḟ czê¶æ, je¶li przyspiesza zbyt szybko.
- Mechaniczne uszkodzenia. Robot zmienia ksztaġt, gdy przyspiesza. Dzieje siê to w luỳnych ġḟczach i poġḟczeniach
System Sterowania Z Wielu Zmiennymi
Do tego momentu próbowali¶my zbudowaæ system sterowania robotem, który mógġby sġuṡyæ do utrzymywania pojedynczej zmienne , takiej jak pozycja .Powinni¶my przyznaæ ,ṡe matematyka systemu sterowania jest bardzo ogólna i ma zastosowanie równieṡ do robotów, które chcḟ kontrolowaæ inne pojedyncze zmienne, takie jak prêdko¶æ lub przyspieszenie. Chociaṡ systemy kontroli tempomatu sḟ bardzo zġoṡone , sḟ to po prostu systemy sterowania , które regulujḟ prêdko¶æ w zaleṡno¶ci od potrzeb kierowcy. Ale co siê stanie je¶li chcemy kontrolowaæ jednocze¶nie dwie lub wiêcej zmiennych? Zaġóṡmy
,ṡe chcemy aby robot podḟṡaġ za czarnḟ liniḟ i poruszaġ z bezpiecznḟ prêdko¶ciḟ. Kontrola zarówno pozycji (wzglêdem czarnej linii), jak i prêdko¶ci (aby robot nie zmieniaġ kierunku zbyt szybko z duṡḟ prêdko¶ciḟ) pozwala nam kontrolowaæ dwie zmienne w tym samym czasie. Jak to robimy?
Jednym z rozwiḟzañ jest umieszczenie dwóch osobnych systemów sterowania w robocie. Jeden system bêdzie sterowaġ poġoṡeniem wzglêdem czarnej linii. Drugi system sterowania upewnia siê ,ṡe robot porusza siê z odpowiedniḟ prêdko¶ciḟ. Taki system kontroli jest z natury rozproszonym systemem kontroli, takim jak te, które omówili¶my wcze¶niej. W rzeczywisto¶ci auta majḟ wiele komputerów obsġugujḟcych te zadania. Kaṡdy system sterowania ma wġasny zestaw problemów , które omówili¶my, takich jak stan bġêdu stabilnego, przekroczenie, dzwonienie i czas ustalania Jednakṡe, jak mówili¶my, w sekcji dotyczḟcej rozproszonych systemów kontroli ,sytuacja moṡe siê bardzo skomplikowaæ. Oto kilka punktów do rozwaṡenia:
• Czy ma sens spowalnianie robota je¶li znajduje siê on bardzo daleko od czarnej linii?
• Czy przydaġoby siê przyspieszyæ, je¶li robot zmierza w dobrym kierunku przez dġugi czas?
• Co robimy , je¶li jeden z systemów kontroli stwierdzi ,ṡe jest caġkowicie poza kontrolḟ? Je¶li straci ¶lad czarnej linii, czy powinien zwolniæ?
• Je¶li robot porusza siê bardzo szybko, czy musimy szukaæ czarnej linii na zakrêtach?
Wszystkie scenariusze przemawiajḟ za przesyġaniem informacji tam i z powrotem miêdzy dwoma systemami kontroli. Co wiêcej, sposoby interakcji miêdzy nimi mogḟ staæ siê bardziej zġoṡone. W
pewnym momencie, je¶li do robota dodanych zostanie coraz wiêcej systemów sterowania, moṡe wystḟpiæ co nastêpuje:
• Wiele systemów kontroli staje siê drogie
• Komunikacjḟ miêdzy systemami sterowania moṡe byæ droga i spowalniajḟcḟ. W najgorszym przypadku mogḟ wystḟpiæ bġêdy komunikacji
• Interakcje miêdzy systemami mogḟ staæ siê nieprzewidywalne. W najgorszych przypadkach mogḟ powstaæ niestabilno¶ci. Te niestabilno¶ci mogḟ przybraæ formê nieoczekiwanych opóỳnieñ lub atakowania. Atakowanie powstaje wtedy kiedy dwa systemy kontroli nie zgadzajḟ siê i walczḟ o kontrolê nad czê¶ciami systemu. Kaṡdy system sterowania widzi dziaġania drugiego jako tworzḟcego bġḟd
• Projekty mogḟ staæ siê bardzo zġoṡone, aby uwzglêdniæ wszystkie przypadki
• Projekty mogḟ byæ trudne do zarzḟdzania. Gdy jeden system sterowania zostanie zmieniony, inne systemy mogḟ przestaæ funkcjonowaæ. Ponowne testowanie staje siê duṡym zadaniem.
Wiele lat temu, inṡynierowie zaczêli rozwaṡaæ systemy kontroli, które majḟ wiêcej niṡ jednḟ zmiennḟ. Musimy tylko popatrzeæ na stare rysunki silników parowych aby to doceniæ. Musieli regulowaæ szybko¶æ, ci¶nienie, temperaturê i kilka innych zmiennych w tym samym czasie. Ogólne podej¶cie polegaġ wówczas na wprowadzeniu w razie potrzeby wielu mechanicznych ukġadów sterowania z blokadami. Awaria oznaczaġa wybuch!
Regulator prêdko¶ci,
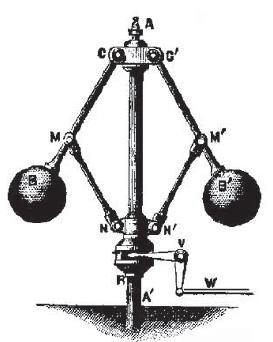
jest doskonaġym przykġadem uṡytej inṡynierii mechanicznej ,dla rozwiḟzania problemu systemu sterowania. Reguluje szybko¶æ silnika. Wraz ze wzrostem szybko¶ci silnika obie metalowe kulki wirujḟ wokóġ pionowego waġu . Poniewaṡ zewnêtrzna siġa od¶rodkowa wzrasta, kule zaczynajḟ siê poruszaæ na zewnḟtrz, ciḟgnḟc za sobḟ uko¶ne rozpórki. Uko¶ne rozpórki , je¶li zostanḟ wyjḟtkowo mocno rozciḟgniête, podciḟgnḟ podstawê i wyzwolḟ nieco ci¶nienia pary. Dziêki temu, silnik nie jedzie zbyt szybko. To dobry przykġad oddzielnego systemu sterowania prêdko¶ciḟ. Kilka lat póỳniej inṡynierowie zaczêli my¶leæ o scentralizowaniu systemów sterowania. Elektronika komputerowa uġatwia to przej¶cie
poniewaṡ wszystkie informacje moṡna ġatwo zebraæ w jednym miejscu i zmanipulowaæ. Inṡynierowie wybrali sposób kontrolowania wielu zmiennych w tym samym czasie i poruszyli kilka kluczowych pytañ:
• Jak zaprojektowaæ system wielu zmiennych? Jakie ma mieæ ramy?
• Ile zmiennych moṡe kontrolowaæ w tym samym czasie? Jaki ekwiwalent istnieje dla "bġêdu stanu ustalonego" w systemie wielu zmiennych?
• Jak oceniamy wzglêdny stan systemu sterowania? Jak daleko jest od optymalnego stanu kontroli? Jaki jest sygnaġ bġêdu?
• Jak moṡemy zmieniæ projekt systemu aby wpġynḟæ na jego wydajno¶æ?
Spójrzmy na pierwsze z tych pytañ
Jak zaprojektowaæ system wielu zmiennych? Jakie ma mieæ ramy?
Zaġóṡmy dla uproszczenia ,ṡe próbujemy zaprojektowaæ system sterujḟcy dla sterowania tylko dwóch zmiennych w tym samym czasie: X1 i X2 (byæ moṡe pozycja i prêdko¶æ). Poniṡszḟ dyskusjê moṡna uogólniæ na n zmiennych (X1, X2, X3 … Xn). Moṡemy nazwaæ kombinacjê zmiennych X1 i X2, wektorem
X. Zaġóṡmy , ṡe poṡḟdany stan tych dwóch zmiennych jest nastêpujḟcy:
• X1 = X1d
• X2 = X2d
Moṡemy nazwaæ poṡḟdany stan wektora X, wektorem Xd. Je¶li w systemie sterowania sḟ uṡywane komputery, komputer okresowo znajduje sposób na zmianê X w oparciu o warto¶æ Xd. W takim systemie sterowania , mówimy o obliczeniach wykonywanych okresowo, sekwencyjnych czasach oznaczonych t-1, t, t+1, itd. Uṡyjemy nastêpujḟcej notacji
• X(t-1) pokazuje warto¶ci X w poprzednim czasie obliczeniowym
• X(t) pokazuje warto¶ci w obocznym czasie obliczeniowym
• X(t+1) pokazuje warto¶ci X w kolejnym czasie obliczeniowym
Podobnie Xd(t) reprezentuje szereg czasowy warto¶ci dla Xd. Aby na przykġad obliczyæ nastêpnḟ warto¶æ X1, na przykġad, komputer obejrzy poprzedniḟ i przedstawia warto¶ci zarówno X1 jak i X2, i okre¶li w jaki sposób zmieniæ X1 w sposób przyrostowy. Takie samo obliczenie wykonujemy dla X2. Wykonane poprawnie, X1 i X2 bêdzie powoli ¶ledziæ poṡḟdane warto¶ci. Ale jak mamy znaleỳæ iteracjê? Iteracja jest procesem powtarzania obliczeñ w sposób okresowy w celu osiḟgniêcia okre¶lonego celu. Zwykle równania iteracyjne reguluje proces iteracji. Poniṡej znajduje siê równanie iteracji ogólnego przeznaczenie, które jest czêsto uṡywane w robotach. X(t) jest wyliczane przez iteracjê przez przyjmowanie warto¶ci w czasie t i iterowanie do nastêpnej warto¶ci w czasie t+1:
X(t+1) = X(t) - S(t) x (dC(X(t)) / d(X(t))
W tym równaniu S(t) jest wektorem wielko¶ci kroku , który moṡe zmieniaæ siê z czasem , ale moṡe byæ staġy. Ten wektor moṡe zawieraæ w naszym przykġadzie dwie staġe warto¶ci wielko¶ci kroku, kaṡda z grubsza proporcjonalna do 5 procent ¶redniej wielko¶ci X1 i X2. Alternatywna metoda moṡe sprawiæ, ṡe wektor bêdzie zawieraġ dwie zmienne warto¶ci wielko¶ci kroku, , z grubsza proporcjonalne do 5 procent aktualnych warto¶ci X1 i X2. Chodzi o to ,ṡe X1 i X2 zmieniajḟ siê stopniowo w okre¶lonym kierunku, aby speġniæ wymagania systemu sterowania. Je¶li funkcja kosztów C(Xt)) pokazuje ,ṡe X1 musi wzrosnḟæ, to iteracja czasu równania spowoduje przesuniêcie X1 o wielko¶æ kroku. Je¶li funkcja kosztu pokazuje ,ṡe X2 musi siê zmniejszyæ, to iteracja czasu równania spowoduje przesuniêcie X2 o wielko¶æ kroku. C(X(t)), wektor funkcji kosztowych oparty na X(t), nie ostaġ jeszcze zdefiniowany. Funkcja kosztu jest miarḟ "bólu", którego do¶wiadcza system sterowania, poniewaṡ warto¶ci (przeszġe
i przyszġe) X(t) nie pasujḟ do poṡḟdanych warto¶ci Xd(t). Uṡywamy pochodnej (d C(X(t))/dX(t)) poniewaṡ chcemy mieæ rozmiar kroku korekcyjnego.
• Bêdzie wiêkszy je¶li koszt (ból) ro¶nie szybko, gdy X(t) zmienia siê w niewġa¶ciwy sposób. Dlatego musimy podjḟæ bardziej drastyczne dziaġania naprawcze
• Bêdzie mniejsze je¶li koszt (ból) nie ro¶nie szybko, poniewaṡ X(t) zmienia siê wġa¶ciwie. Jeste¶my blisko poṡḟdanego obszaru operacji i nie odczuwamy bólu wiêc po co siê duṡo ruszaæ?
Takie równanie iteracyjne moṡe wykorzystaæ jako rozwiḟzanie do sterowania robotycznego. Ale co je¶li brakuje funkcji kosztów. Wġa¶ciwy wybór funkcji kosztowej naprawdê determinuje zachowanie robota. Wiele wspóġczesnych prac nad systemami sterowania obraca siê wokóġ wyboru funkcji kosztowej i sposobu jej uṡycia podczas iteracji. Jednḟ z bardzo popularnych ram zapewniajḟcych system sterowania jest struktura najmniejszych kwadratów (LMS) , odkryta przez Legendre'a i Gaussa na poczḟtku XIX wieku. Wyznaczenie algorytmu najmniejszego ,¶redniego kwadratu (LSM), ustawia funkcjê kosztu C(X(t)), proporcjonalnḟ do sumy kwadratów bġêdów w kaṡdym elemencie wektora:

gdzie k jest dowolnḟ staġḟ skalowania. W naszym konkretnym przykġadzie moṡemy ustawiæ funkcjê kosztów na sumê kwadratów bġêdów:

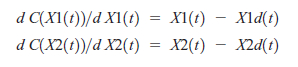
Róṡniczkujḟc X1 i X2 , uzyskujemy dwa elementy z (d(C(X(t))) / dX(t)) :
Funkcja kosztu zwiêksza wielko¶æ jako kwadrat bġêdów. Wielko¶æ kroku, uṡywana do odzyskiwania po bġêdach, a nastêpnie zwiêksza siê liniowo proporcjonalnie do bġêdu. W szczególno¶ci wtedy gdy:
X(t+1) = X(t) - S(t) x (d C(X(t))/dx(t))
mamy dwa elementy iterowane w nastêpujḟcy sposób:

Gdyby¶my mieli ustawiæ rozmiary kroków S1(t) = S2(t) - 0,1 wtedy

Zatem X1 i X2 powoli poszukujḟ warto¶ci X1d i X2d. Równieṡ X(t) powoli wyszukuje warto¶ci Xd(t). Zanim przyjrzymy siê funkcjom kosztów inaczej niṡ przez LMS, zakoñczymy odpowiadajḟc na kilka innych pytañ jakie postawili¶my wcze¶niej.
Jak wiele zmiennych moṡna kontrolowaæ w tym samym czasie?
Praktycznie rzecz biorḟc, algorytm LMS moṡe obsġugiwaæ dowolnḟ liczbê zmiennych symultanicznych. Jednak ,wraz ze wzrostem liczby zmiennych drastycznie wzrasta niebezpieczeñstwo interakcji. Podstawowym niebezpieczeñstwem jest to ,ṡe nieznane interakcje miêdzy zmiennymi odrzucajḟ obliczenia i destabilizujḟ system sterowania. To czêsto pojawia siê w matematyce, je¶li zmienne nie sḟ caġkowicie niezaleṡne. W naszym przykġadzie pochodna z X1 wzglêdem X2 moṡe nie byæ prawdziwa dla zera lub vice versa. To znacznie pogorszyġoby stabilno¶æ iteracji stopniowych. Zgodnie z ogólnḟ zasadḟ, staraj siê nie uṡywaæ jednego systemu sterowania do obsġugi zbyt wielu zmiennych w tym samym czasie. Dwie do czterech zmiennych jest dobrym miejscem do zatrzymania siê
Jaki ekwiwalent istnieje dla "bġêdu stanu ustalonego" w systemie wielu zmiennych?
Po pierwsze, gdy istnieje wiele zmiennych, naleṡy pamiêtaæ ,ṡe jest to caġkowicie moṡliwe, ṡe system nigdy nie osiḟgnie stanu ustalonego. Jednak obliczenia cyfrowe mogḟ siê znaleỳæ w caġkowicie stabilnym i cichym rozwiḟzaniu. Takie rozwiḟzanie miaġoby X(t) staġe i równe Xd(t). Jednak przy pewnych minimalnych rozmiarach kroku, moṡe nie byæ moṡliwe zbieṡno¶æ z cichym rozwiḟzaniem. Takie rozwiḟzanie miaġoby X(t) stabilnych i równych Xd(t). Pomy¶l przez minutê o systemie przy 9, szukajḟc 10, minimalnym krokiem 2 w tyġ i przód. System bêdzie prawdopodobnie wahaġ siê miêdzy 9 a 11 i z powrotem do 9. Starannie opracowany algorytm sterowania pozwala uniknḟæ takiego problemu.
Jak oceniamy wzglêdny stan systemu sterowania? Jak daleko jest od optymalnego stanu kontroli? Jaki jest sygnaġ bġêdu?
W przypadku systemu LMS moṡna ¶ledziæ rozmiar funkcji kosztu. Wszystkie warunki w sumie sḟ dodatnimi, liczbami kwadratowymi. Wielko¶æ moṡe byæ uṡywana jako miara stanu systemu. Chcemy wyraỳnie aby byġ maġy. Ponadto, pierwsza pochodna funkcji kosztu powinna byæ cicha. Wzglêdny poziom haġasu , funkcja kosztu jest miarḟ zmienno¶ci systemu i moṡe byæ wykorzystany do wskazania zakġóceñ na wej¶ciach systemu.
Jak moṡemy zmieniæ projekt systemu aby wpġynḟæ na jego wydajno¶æ?
Algorytm LMS jest wzglêdnie prosty z nastêpujḟcych powodów:
• Moṡemy zachowaæ rozmiar kroku w wektorze S(t) jako staġy. Je¶li rozmiary kroku waha siê od 0 do 1, szybko¶æ odpowiedzi systemu zmienia siê od lodowatego do króliczka. Musimy uznaæ
,ṡe systemy sterujḟce typu króliczek ,majḟ zbyt wysokḟ czêstotliwo¶æ i sḟ podatne na przeregulowanie , dzwonienie i niestabilno¶æ. Dobrym pomysġem jest sprawienie ,aby twój robot pracowaġ na warto¶ciach S(t)
• Moṡemy zmieniæ wielko¶æ kroku w wektorze S(t), aby zachowaæ stan spoczynkowy systemu. Sposób w jaki to robi, musi byæ wybierany z wielkḟ ostroṡno¶ciḟ, aby uniknḟæ dodawania haġasu do systemu. Dobrym rozwiḟzaniem jest zmniejszenie rozmiarów kroków, gdy system zaczyna siê wyciszaæ, i zwiêkszaæ rozmiar kroków (w granicach rozsḟdku) , poniewaṡ system zaczyna haġasowaæ i jest aktywny.
• Moṡemy zmieniaæ rozmiary kroków w taki sposób, aby zawsze byġy potêgḟ 2 . Mnoṡenie (lub dzielenie) przez potêgê dwa wymaga tylko prostej operacji zmiany arytmetyki binarnej. Ograniczenie rozmiaru kroków do takich warto¶ci moṡe znacznie uġatwiæ obliczenia LMS dla mniejszych mikrokomputerów.
• Moṡemy ustawiæ rozmiar kroków na 0 gdy funkcja kosztu jest wystarczajḟco maġa. Zabiega to zakġóceniom w pobliṡu optymalnego rozwiḟzania. Takie zakġócenie moṡe byæ spowodowane szumem wej¶ciowym i niewielkimi efektami arytmetycznymi. Wyobraỳ sobie windê otwierajḟcḟ drzwi. Pasaṡerowie nie sḟ zainteresowani uzyskaniem dokġadnie poziomu podġogi,o ile jest wystarczajḟco blisko. Pasaṡerowie byliby naprawdê niezadowoleni gdyby system sterujḟcy windy wciḟṡ poruszaġ siê w górê i w dóġ , próbujḟc to naprawiæ. Zamiast tego, systemy sterujḟce windy zatrzymajḟ wszystkie dziaġania po otwarciu drzwi. Moṡemy osiḟgnḟæ podobny efekt , ustawiajḟc rozmiar kroku na 9. Póỳniej przyjrzymy siê innym kwestiom bezpieczeñstwa.
Funkcje Kosztów NIE-LMS
Algorytm sterowania, taki jak LMS. ma cechy behawioralne, które wpġywajḟ na sposób w jaki robot bêdzie siê zachowywaġ:
• System sterujḟcy LMS majḟ tendencjê do reagowania wolniej na dane wej¶ciowe. Zazwyczaj oznacza to ,ṡe majḟ wolniejszy czas reakcji
• Systemy sterujḟce LMS sḟ bardziej stabilne w obliczu szumu na wej¶ciach
• Matematyka nie jest trudna i nie zuṡywa cennych zasobów komputera
Dostêpne sḟ funkcje kosztowe poza LMS. LMS wciḟṡ wymaga mnoṡenia, które mogḟ pochġaniaæ czas i zasoby komputera. LMS mnoṡy rozmiar kroku przez bġḟd róṡnicowy (X1 - X1d),aby uzyskaæ wielko¶æ kroku iteracji. Moṡna do tego podej¶æ w inny sposób:
• Uṡywaj tylko znaku (X1 - X1d) a nie wielko¶ci. Znak po prostu wskazuje w jaki sposób X1 jest wyġḟczone. Caġy rozmiar kroku jest po prostu dodawany lub odejmowany od X1 dla iteracji do kolejnej warto¶ci. To sprawia ,ṡe krok iteracji jest prostym dodawaniem lub odejmowaniem i unikamy mnoṡenia. Moṡe to byæ szczególnie cenne , je¶li wybierzemy maġy mikrokomputer ,który nie ma mnoṡnika.
• Uṡywamy wzglêdnego rozmiaru (X1-X1d) aby wybraæ rozmiar kroku z tabeli rozmiaru kroków. Moṡe to dziaġaæ dobrze, a takṡe pozwala unikaæ mnoṡenia. Moṡe zbiegaæ siê szybciej gdy funkcja kosztów jest duṡa i moṡe pozostaæ do¶æ cicha w kwestii optymalnego rozwiḟzania.
Systemy z wieloma zmiennymi majḟ równieṡ inne szczególne cechy. Zagadnienie stabilno¶ci, zbieṡno¶ci i szybko¶ci dziaġania muszḟ byæ omówione tutaj:
• Stabilno¶æ. Jak juṡ wspomniano, je¶li rozmiar kroku jest zbyt duṡy, system moṡe oscylowaæ wokóġ punktu rozwiḟzania w sposób niedopuszczalny. Ponadto wszystkie zmienne mogḟ nie byæ w stanie osiḟgnḟæ optymalnego rozwiḟzania w tym samym czasie. System moṡe pozostaæ gġo¶ny na zawsze, nawet je¶li dane wej¶ciowe przestanḟ siê poruszaæ.
• Konwergencja. W niektórych sytuacjach system sterowani nie dziaġa, przechodzḟc do akceptowalnego rozwiḟzania:
- Znajdowanie rozwiḟzania. Czasami pozycja poczḟtkowa robota moṡe wpġywaæ na to ,czy przeniesie siê do wybranej lokalizacji czy nie. System sterowania zawsze ma zbiór punktów, poza którymi nie moṡe odzyskaæ. Podczas projektowania i dziaġania naszego systemu sterowania robotem musimy upewniæ siê ,ṡe robot nie zostanie poproszony o odzyskiwanie w takiej sytuacji. Zauwaṡ ,ṡe musimy ustaliæ co jest akceptowalnym rozwiḟzaniem dla robota. Czêsto wiḟṡe siê to z pewnym parametrami dotyczḟcymi wielko¶ci funkcji kosztu, ale moṡna tego dokonaæ na wiele róṡnych sposobów.
- Unikanie faġszywych rozwiḟzañ. Czasami systemy arytmetyczne bêdḟ ustawiaæ siê na faġszywym rozwiḟzaniu. Przykġadem moṡe byæ robot szukajḟcy najwyṡszego wzniesienia, aby znaleỳæ mniejsze wzgórze w pobliṡu. Je¶li system sterowania musi radziæ sobie ze zġoṡonym ¶rodowiskiem, moṡe siê to wydarzyæ ġatwiej niṡ moṡna podejrzewaæ. Je¶li sytuacja wyglḟda podejrzanie, zastanów siê nad wprowadzeniem jakiego¶ mechanizmu bezpieczeñstwa dla systemu sterowania, który wyrzuci robota z faġszywego rozwiḟzania je¶li utknie w jednym. Taki
system "bezpieczeñstwa" musi byæ bardzo dobrze zaprojektowany, aby upewniæ siê ,ṡe nie tworzy on faġszywego alarmu i nie zakġóca dobrego rozwiḟzania
- Szybko¶æ dziaġania. Tak jak w przypadku kaṡdego systemu sterowania robotem, zawsze spodziewana jest dobra wydajno¶æ. Szybko¶æ dziaġania jest prawie zawsze w jednym z kryteriów. Je¶li rozmiary kroku sḟ zbyt maġe. moṡe zajḟæ niewiarygodnie dġugo, aby przej¶æ do wġa¶ciwego rozwiḟzania. Wybierz wielko¶æ kroku aby zoptymalizowaæ zachowanie robota pod wzglêdem szybko¶ci i dokġadno¶ci. Rozwaṡ wybór rozmiaru kroku, aby najlepiej pasowaġ do moṡliwo¶ci poruszania siê i manewru robota. Je¶li wzorzec jest bliski, wyniki bêdḟ lepsze w postaci pġynniejszej operacji.
Teraz potrzebujemy trochê nagrody za przebrniêcie przez tak "uṡytecznḟ" matematykê .Czas trochê pomarzyæ i porozmawiaæ o bardziej ezoterycznych sprawach, które mogḟ na nas nie wpġynḟæ dzi¶ lub jutro, ale i tak sḟ waṡne.
Czas
Nieco mówili¶my o tym ,ze nie moṡna liczyæ na to ,ṡe Ziemia bêdzie stabilnym punktem odniesienia da naszego robota. Z praktycznego punktu widzenia jest wystarczajḟco stabilna w kaṡdym przypadku. Ale za to Albert Einstein podrzuca nam kolejnḟ zasġonê dymnḟ. Okazuje siê , ṡe nie moṡemy liczyæ na to ,ṡe sam czas bêdzie niezmienny w naszych obliczeniach. Je¶li jednak robot porusza siê z maġḟ szybko¶ciḟ i pozostaje z dala od czarnych dziur, prawdopodobnie moṡemy zignorowaæ nastêpujḟce rozwaṡania. Je¶li robot bêdzie poruszaġ siê z duṡymi prêdko¶ciami w stosunku do Ziemi, wtedy obliczenia Einsteina wchodzḟ w grê. Na poczḟtku XX wieku Einstein, wy wymy¶liġ specjalnḟ teoriê wzglêdno¶ci, która utrzymuje ,ze czas nie zawsze biegnie w tym samym tempie. Je¶li dwa ciaġa poruszajḟ siê wzglêdem siebie, do¶wiadczḟ czasu z dwiema róṡnymi wspóġczynnikami. Efekt nie staje siê powaṡny, dopóki prêdko¶ci nie sḟ wysokie. Ale nawet astronauci okrḟṡajḟcy Ziemiê, muszḟ wziḟæ pod uwagê czas relatywistyczny lub ich obliczenia wyġḟczone bêdḟ wyġḟczone. Czas zmienia siê w przybliṡeniu jako 1/sqrt(1-(v/c)2), gdzie v jest wzglêdnḟ prêdko¶ciḟ obiektu, a c jest prêdko¶ciḟ ¶wiatġa. Korzystajḟc z tego wzoru, przy prêdko¶ci orbitalnej okoġo 8800 metrów ,i danej szybko¶ci ¶wiatġa 300 000 000 metrów na sekundê, otrzymujemy rozszerzajḟcy siê czas dla orbitujḟcego statku kosmicznego
Wiêc rozwaṡmy sowieckiego kosmonautê , który spêdziġ 458 dni w kosmosie , co daġo 458 x 24 x 60 x 60 = 39 571 000 sekund. Ignorujḟc wszystkie inne ruchy statku kosmicznego inne niṡ prêdko¶æ orbitalnḟ, czas rozszerzajḟcy kosmonauty 39 571 000 x 1,0000000004 = 39 571 000 017 sekund. Tak wiêc, po ponad roku na orbicie , dla kosmonauty nastḟpiġa zmiana czasu o 17 milisekund . To niewiele
,ale przy prêdko¶ci orbitalnej 8800 m/s , kosmonauta wyleciaġby na 150 metrów (8800 x 0,017). To nie jest daleko, biorḟc pod uwagê rozlegġo¶æ Ziemi, ale duṡy bġḟd podczas próby dokowania. Plani¶ci orbitalni biorḟ pod uwagê efekty relatywistyczne podczas planowania orbit i misji miêdzyplanetarnych
Przestrzeñ
Cóṡ, je¶li nie jest wystarczajḟco ỳle, kiedy martwisz siê czym jest czas, Einstein rzuciġ kolejnḟ zagwozdkê dla naszego zbiorowego my¶lenia. Ogólna Teoria Wzglêdno¶ci gġosi ,ṡe sama tkanka przestrzeni to nie tylko seria prostych prostopadġych linii, jak wzór ulic, ale raczej zakrzywiona i zmieniajḟca siê! Wymy¶liġ
tê teoriê za pomocḟ piêknego "eksperymentu my¶lowego". Zamiast pracowaæ w laboratorium, Einstein usiadġ i przedstawiġ eksperyment w swojej gġowie. Oto sposób jego my¶lenia. Zaġóṡmy ,ṡe siedzimy w pokoju w odlegġej przestrzeni, gdzie nie ma grawitacji. Dwie dziury znajdujḟ siê w ¶cianie . jedna po lewej a druga po prawej stronie. Promieñ ¶wiatġa przechodzi przez jednḟ ¶cianê i wychodzi przez drugḟ. Nie trzeba wiele aby wiḟzka przeszġa przez pokój z prêdko¶ciḟ ¶wiatġa. Ḋwiatġo przemierza 30 cm na miliardowḟ czê¶æ sekundy
Je¶li teraz przyspieszymy pokój w górê z prêdko¶ciḟ 975 cm/sekundê/sekundê (1G grawitacji), kiedy kolejna wiḟzka ¶wiatġa przechodzi przez pierwszḟ dziurê, nie wydostanie siê przez drugḟ dziurḟ (która jest teraz ruchoma) . Z naszego punktu widzenia ,siedzḟcego w pokoju , promienie ¶wiatġa zakrzywiajḟ siê po wej¶ciu do pokoju i uderzajḟ w ¶cianê zbyt nisko . Teraz przypu¶æmy ,ṡe zamiast przyspieszenia, natychmiast pod pokojem poġoṡyli¶my Ziemiê. Z punktu widzenia siedzḟcego w pomieszczeniu, nie moṡna mówiæ o róṡnicy. Nadal do¶wiadczamy przyspieszenia 1G pod nami. Strumieñ ¶wiatġa pojawia siê w pierwszym otworze i nadal zagina aby uderzyæ w ¶cianê poniṡej drugiego otworu. To grawitacja zagina ¶wiatġo. Ale je¶li utrzymamy ,ṡe ¶wiatġo musi poruszaæ siê w linii prostej ze staġḟ prêdko¶ciḟ, to musimy stwierdziæ ,ṡe grawitacja pochyla siê sama zagina przestrzeñ. Samo istnienie materii, która wytwarza siġê grawitacji, zagina naszḟ tkaninê przestrzeni. Wydaje siê do¶æ proste, prawda? Aby¶ nie martwiġ siê o swojḟ "wypaczonḟ" egzystencjê, moṡesz mieæ pewno¶æ ,ze zagiêcie przestrzeni jest niewielkie i moṡe byæ zignorowane w wiêkszo¶ci naszych codziennych czynno¶ci. Okoġo pierwszej wojny ¶wiatowej, niektórzy astronomowie postanowili poddaæ próbie ogólnḟ teoriê wzglêdno¶ci Einsteina. Obserwowali pewne znane gwiazdy podczas zaæmienia Sġoñca . Rzeczywi¶ci gwiazdy pojawiġy siê zza Sġoñca i Ksiêṡyca, wcze¶niej niṡ powinny. Ḋwiatġo gwiazd pochodziġo zza Sġoñca (skḟd astronomowie nie powinni go zobaczyæ), zakrzywiajḟc siê wokóġ grawitacji sġoñca i pojawiajḟc siê wcze¶niej niṡ powinno. Co wiêcej, ilo¶æ obserwowanego zaginania ¶ci¶le pasowaġa do teoretycznych obliczeñ Einsteina. Byġa to rewelacja w nauce i gġówne odkrycie Einsteina. Kilka lat póỳniej naukowcy odkryli trzy gwiazdy z rzêdu, z których dwie wyglḟdaġy identycznie. Okazaġo siê ,ṡe ¶wiatġo jednej gwiazdy byġo pochylone wokóġ gwiazdy po¶redniej , wiêc oba obrazy ukazaġy siê nam na Ziemi. To byġa kolejna manifestacja grawitacyjne zaginania ¶wiatġa i zostaġo nazwane soczewkowaniem grawitacyjnym. Poniewaṡ ¶wiatġo gwiazd moṡe zakrzywiaæ siê wokóġ gwiazdy po¶redniej w dowolnym kierunku (360 stopni), soczewkowanie grawitacyjne czêsto zapewnia obraz gwiazdy jako pier¶cieñ lub ġuk ¶wiatġa.
•