Elementarz matematyki i fizyki
Nie moŋna się przed tym ukryæ - jeķli chcesz nauczyæ się sztucznej inteligencji, musisz poznaæ matematykę i fizykę. Jasne, moŋesz uŋywaæ wielu technik sztucznej inteligencji w sposób "wytnijj i wklej", ale nie robisz sobie ŋadnych przysģug; w momencie, gdy musisz rozwiązaæ problem nieco inny niŋ ten, do którego poŋyczyģeķ kod, będziesz miaģ trudnoķci. Jeķli jednak zrozumiesz teorię tych technik, będziesz mieæ znacznie większą szansę na znalezienie alternatywnego rozwiązania. Poza tym dobrze jest zrozumieæ narzędzia, z którymi pracujesz. Jaki jest lepszy powód, aby nauczyæ się tego, niŋ to? Przejrzyj tekst, aŋ dojdziesz do czegoķ, czego nie znasz lub nie znajdziesz tematu, który Twoim zdaniem wymaga odķwieŋenia. W tym momencie zacznij czytaæ. Jeķli juŋ znasz się na matematyce wektorowej i fizyce ruchu, proponuję caģkowicie pominąæ tą częķæ i wróciæ póžniej, jeķli znajdziesz coķ, czego nie rozumiesz.
Matematyka
Zaczniemy od matematyki, poniewaŋ nauka fizyki bez matematyki przypomina latanie bez skrzydeģ.
Wspóģrzędne kartezjaņskie
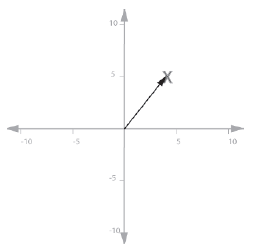
Prawdopodobnie znasz juŋ kartezjaņski ukģad wspóģrzędnych. Jeķli kiedykolwiek napisaģeķ program, który rysuje obrazy na ekranie, prawie na pewno uŋyjesz kartezjaņskiego ukģadu wspóģrzędnych do opisania pozycji punktów, linii i bitmap tworzących obraz. W dwóch wymiarach ukģad wspóģrzędnych jest zdefiniowany przez dwie osie ustawione względem siebie pod kątem prostym i oznaczone w jednostkach dģugoķci. Oķ pozioma nazywa się osią x, a oķ pionowa - osią y. Punkt przecięcia osi nazywany jest punktem początkowym
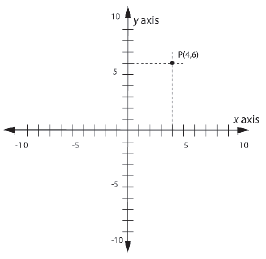
Groty strzaģek na kaŋdym koņcu osi na powyŋszym rysunku wskazują, ŋe rozciągają się one w kaŋdym kierunku w nieskoņczonoķæ. Jeķli wyobraŋasz sobie, ŋe trzymasz nieskoņczenie duŋy arkusz papieru z narysowanymi na nim osiami x i y, papier reprezentuje pģaszczyznę xy - pģaszczyznę, na której moŋna narysowaæ wszystkie punkty w dwuwymiarowym kartezjaņskim ukģadzie wspóģrzędnych. Punkt w przestrzeni 2D jest reprezentowany przez parę wspóģrzędnych (x, y). Wartoķci x i y reprezentują odlegģoķci wzdģuŋ kaŋdej z odpowiednich osi. Obecnie seria punktów lub linii wykreķlonych w kartezjaņskim ukģadzie wspóģrzędnych jest zwykle okreķlana jako wykres, co na pewno oszczędza duŋo pisania.
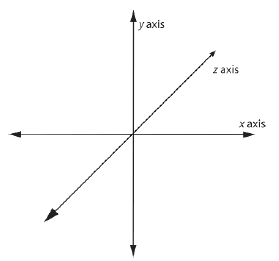
Aby przedstawiæ trójwymiarową przestrzeņ, potrzebna jest inna oķ -
oķ Z Oķ Z rozciąga się od tyģu ekranu do tyģu za gģową, przechodząc przez punkt początkowy na trasie.
Pojęcie funkcji ma fundamentalne znaczenie dla matematyki. Funkcja wyraŋa związek między dwoma (lub więcej) terminami zwanymi zmiennymi i jest zwykle zapisywany w postaci równania (zestaw wyraŋeņ algebraicznych równy innym wyraŋeniom algebraicznym). Zmienne są nazywane jako takie, poniewaŋ, jak sama nazwa wskazuje, ich wartoķci mogą się róŋniæ. Zmienne są zwykle wyraŋane literami alfabetu. Dwie najczęķciej uŋywane zmienne, które zobaczysz w równaniach matematycznych, to xiy (chociaŋ dowolna litera lub symbol jest równie poprawna). Jeķli kaŋda wartoķæ x moŋe byæ powiązana z jedną wartoķcią y, to y jest funkcją x. y jest zmienną zaleŋną, poniewaŋ jej wartoķæ zaleŋy od wartoķci x. Oto kilka przykģadów:
y = 2x (1,1)
y = mx + c (1,2)
W drugim przykģadzie m i c reprezentują staģe (czasem nazywane wspóģczynnikami) - wartoķci, które nigdy się nie zmieniają bez względu na wartoķæ x. Są skutecznie podobne do równania 2 w równaniu (1.1). Dlatego jeķli a = 2, równanie (1.1) moŋna zapisaæ w następujący sposób:
y = ax (1.3)
Biorąc pod uwagę dowolną wartoķæ x, odpowiednią wartoķæ y moŋna obliczyæ, wprowadzając wartoķæ x do funkcji. Biorąc pod uwagę x = 5 i x = 7 oraz funkcję y = 2x, wartoķci y są następujące:
y = 2 (5) = 10
y = 2 (7) = 14 (1,4)
Ten typ funkcji, gdzie y zaleŋy tylko od jednej innej zmiennej, nazywa się funkcją jednej zmiennej. Funkcje jednej zmiennej moŋna wizualizowaæ, wykreķlając je na pģaszczyžnie kartezjaņskiej xy. Aby wykreķliæ funkcję, wystarczy przesuwaæ się wzdģuŋ osi x i dla kaŋdej wartoķci x uŋyj funkcji do obliczenia wartoķci y. Oczywiķcie nie moŋna wykreķliæ wykresu dla kaŋdej wartoķci x - co zajęģoby wiecznoķæ (dosģownie) - więc musisz wybraæ zakres wartoķci. Lewa strona poniŋszego rysunku pokazuje, jak wygląda funkcja y = 2x po wykreķleniu na pģaszczyžnie xy, przy uŋyciu zakresu wartoķci x od -5,0 do 5,0.
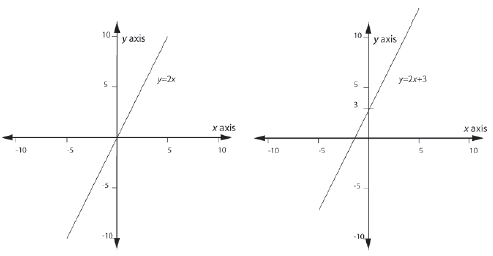
Aby narysowaæ funkcję y = mx + c na wykresie, musisz najpierw mieæ pewne wartoķci dla staģych m i c. Powiedzmy, ŋe m = 2 i c = 3, co daje funkcję y = 2x + 3. Prawa strona rysunku powyŋej pokazuje wynikowy wykres. Wykresy wyglądają bardzo podobnie, prawda? Jest tak, poniewaŋ y = mx + c jest funkcją, która definiuje wszystkie linie proste w przestrzeni 2D. Staģa m okreķla gradient linii lub to, jak strome jest nachylenie linii, a staģa c okreķla, gdzie linia przecina oķ y. Funkcja y = 2x, pokazana po lewej stronie na rysunku, jest równowaŋna funkcji y = mx + c, gdy m = 2 i c = 0. Wykres po prawej jest prawie identyczny, ale poniewaŋ jego wartoķæ c wynosi 3, punkt przecięcia osi y jest przesunięty w górę o trzy jednostki. Czasami zobaczysz funkcję taką jak y = mx + c zapisaną w następujący sposób:
f(x) = mx + c (1,5)
Notacja f (x) oznacza, ŋe zmienna zaleŋna - w tym przykģadzie y - zaleŋy od zmiennej x w wyraŋeniu podanym po prawej stronie, mx + c. Często zobaczysz symbole inne niŋ f, które reprezentują funkcję, więc nie myl się, jeķli natrafisz na coķ takiego.
g(x) = x2 + bx (1.6)
g(x) reprezentuje dokģadnie to samo, jakby równanie zostaģo zapisane jako:
f(x) = x2 + bx (1.7)
Funkcje mogą zaleŋeæ od więcej niŋ jednej zmiennej. Wežmy na przykģad obliczenia dla pola prostokąta. Jeķli jego dģugoķæ jest oznaczona literą l, a szerokoķæ przez w, to pole A jest podane równaniem:
A = lw (1.8)
Aby wykreķliæ na wykresie funkcję dwóch zmiennych, taką jak (1.8), naleŋy dodaæ trzeci wymiar, z, poniŋej
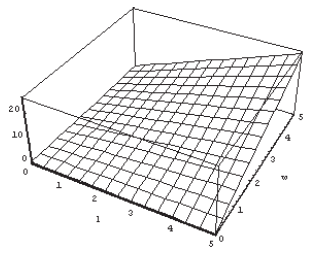
Objętoķæ kostki zaleŋy od funkcji trzech zmiennych:
V = lwh (1.9)
gdzie h oznacza wysokoķæ szeķcianu. Aby narysowaæ to na wykresie, musisz dodaæ czwartą oķ. Niestety, chyba ŋe pod wpģywem związków psychotropowych ludzie nie widzą w więcej niŋ trzech wymiarach. Mamy jednak moŋliwoķæ ich wyobraŋenia, więc to wģaķnie musisz zrobiæ, jeķli chcesz wykreķliæ funkcje z więcej niŋ trzema zmiennymi na wykresie. Matematykom wydaje się to ģatwe, ale wielu programistów, w tym ja, nie! Przestrzeņ, którą zajmuje funkcja n-wymiarowa, gdzie n jest większa niŋ 3, jest często okreķlana przez matematyków jako hiperprzestrzeņ
Wykģadniki i potęgi
Funkcja wykģadnicza jest zdefiniowana w następujący sposób:
f (x) = ax (1.10)
a jest znane jako podstawa, a x jako potęga c. Jeķli równanie zostanie wypowiedziane, powiesz, ŋe f (x) jest równe a do potęgi x. Oznacza to, ŋe a jest mnoŋone przez siebie x razy. Więc 72 to to samo co pisanie 7x7, a 34 to to samo co pisanie 3x3x3x3. Liczba potęgi 2 jest znana jako kwadrat tej liczby, a liczba potęgi 3 jest znana jako szeķcian. Dlatego szeķcian 5 to:
53 = 5 x 5 x 5 = 125 (1,11)
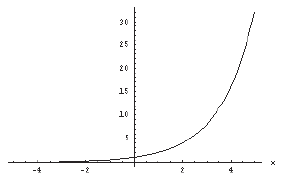
Rysunek poniŋej pokazuje równanie (1.10) wykreķlone na wykresie dla a = 2. Krzywa wyražnie pokazuje, jak gwaģtownie roķnie wartoķæ y przy x. Ten rodzaj krzywej jest często okreķlany jako wzrost wykģadniczy.
NOTA HISTORYCZNA : Z przyczyn straconych przez czas matematycy zdecydowali, ŋe uŋyją drugiej częķci alfabetu do przedstawienia zmiennych, a resztę alfabetu do staģych. Dlatego osie w kartezjaņskim ukģadzie wspóģrzędnych są oznaczone x, y i z.
Pierwiastki z liczb (pierwiastki)
Pierwiastek kwadratowy z liczby jest wartoķcią, która po pomnoŋeniu przez siebie powoduje powstanie oryginalnej liczby. Pierwiastki kwadratowe są zapisywane przy uŋyciu symbolu pierwiastka √. Dlatego pierwiastek kwadratowy z 4 jest zapisany jako:
√4 = 2(1.12)
Moŋemy obliczyæ obie strony tego równania, aby pokazaæ związek między mocą a pierwiastkiem:
4 =22 (1.13)
Pierwiastek kwadratowy z liczby jest takŋe znany jako pierwiastek drugiego stopnia z tej liczby. Moŋemy równieŋ obliczyæ pierwiastek trzeciego, czwartego, piątego lub dowolnego rozmiaru. Trzeci pierwiastek liczby jest znany jako pierwiastek szeķcienny i jest zapisany w następujący sposób:∛. Zauwaŋ, ŋe potrzebujemy tam 3, aby powiedzieæ nam, ŋe pierwiastek ma byæ trzeci. Pierwiastek szeķcienny liczby daje liczbę, która pomnoŋona przez potęgę trzech daje liczbę pierwotną. Na przykģad:
∛27 = 3 (1.14)
Po raz kolejny moŋemy obliczyæ obie strony równania, aby pokazaæ związek między potęgą a pierwiastkiem:
27 = 33 (1.15)
Moŋna równieŋ zapisaæ pierwiastek z liczby jako wykģadnik uģamkowy. Na przykģad pierwiastek kwadratowy z liczby moŋna zapisaæ jako x1/2, pierwiastek trzeciego stopnia jako x1/3i tak dalej.
Przykģad 1
Rozwaŋ następujące równanie:
3x + 7 = 22 - 2x (1.16)
To równanie moŋna uproķciæ, odejmując 7 z obu stron.
3x + 7 - 7 = 22 - 2x - 7
3x = 15 - 2x (1.17)
Moŋna to dodatkowo uproķciæ, dodając 2x po obu stronach:
3x + 2x = 15 - 2x + 2x
5x = 15 (1.18)
Moŋemy równieŋ podzieliæ obie strony przez 5, dając nam odpowiedž na x:
5x/5 = 15/5
x = 3 (1.19)
Rzuæmy okiem na nieco bardziej zģoŋony przykģad.
Przykģad 2
Powiedzmy, ŋe chcemy rozwiązaæ następujące kwestie dla y:
y = 2(3x-5y) + x/3 (1.20)
Przede wszystkim moŋemy usunąæ nawiasy, mnoŋąc termin w nawiasach (3x - 5y), przez wyraz na zewnątrz (2), dając:
y = 6x - 10y + x/3 (1.21)
Następnie dobrze jest usunąæ wszystkie wyraŋenia uģamkowe, mnoŋąc wszystkie wyraŋenia po obu stronach przez mianowniki uģamków (mianownikami są wartoķci poniŋej linii). W tym przykģadzie pomnoŋenie wszystkich terminów po obu stronach równania (1.21) przez 3 daje:
3y = 18x - 30y + x (1.22)
W tym momencie mamy wyraz y po lewej i x i y po prawej. Musimy transponowaæ podobne wyrazy, aby miaģy tę samą stronę równania. W tym przykģadzie moŋemy to zrobiæ, dodając 30y po obu stronach.
3y + 30y = 18x - 30y + x + 30y
3y + 30y = 18x + x (1.23)
Teraz, gdy podobne terminy są zgrupowane razem, moŋemy je ģączyæ. To daje:
33y = 19x (1.24)
Na koniec powinniķmy podzieliæ obie strony przez wspóģczynnik przed nieznaną zmienną. W tym przykģadzie rozwiązujemy dla y, więc musimy podzieliæ obie strony przez 33, dając:
y = 19x/33 (1,25)
Przykģad 3
Oto kilka innych zasad, które przydają się podczas uproszczenia równaņ:
x/y = 1/y · (x) (1,26)
a/x + b/y = ay+bx/ xy (1.27) (x+y)2 = x22 (x/y) 222 √/x/y = √ x/√y (1.30)
Rzuæmy okiem na niektóre nowe zasady w akcji. Tym razem równanie do uproszczenia to:
5x - 2y = (y-x/√x)2 (1.31)
Zastosowanie reguģy (1.29) daje:
5x - 2y = (y-x)2 / (√x)2
5x-2y = (y -x)2 / x (1.32)
Pomnoŋenie obu stron przez x w celu usunięcia częķci uģamkowej daje:
x(5x-2y) = (y-x)2 (1.33)
Teraz, aby pozbyæ się nawiasów po lewej:
5x2 - 2xy = (y-x)2(1.34)
Aby usunąæ nawiasy po prawej stronie, uŋywamy reguģy z (1.28):
5x2 - 2xy = x2 + y2 - 2xy (1.35)
Dodanie 2xy do obu stron daje:
5 x2 = x2 + y 2 (1.36)
Odejmując x2 z obu stron i przestawiając, uzyskujemy uproszczenie:
y2 = 4 x2 (1,37)
Ostatnim krokiem jest obliczenie pierwiastka kwadratowego z obu stron:
y = 2x (1.38)
Oczywiķcie uproszczenie równaņ moŋe byæ znacznie trudniejsze, ale tych kilka reguģy są wystarczające, aby zrozumieæ dowolne z przedstawionych uproszczeņ.
Trygonometria
Trygonometria oparta jest na badaniu trójkątów. Sģowo pochodzi od greckiego sģowa trigon, dla trójkąta i metry, dla miary. Jest to niezwykle przydatna dziedzina matematyki i ma wiele praktycznych zastosowaņ w informatyce. W polu sztucznej inteligencji w grze znajdziesz ją do obliczeņ liniowych (LOS), wykrywania kolizji, niektórych aspektów znajdowania ķcieŋek itp. Wiele sztucznej inteligencji jest naprawdę zaleŋnych od matematyki, gdy ją zagotujesz; mądrze będzie dobrze się tego nauczyæ.
Promienie i odcinki
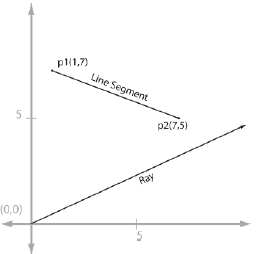
Promieņ to linia z jednym punktem koņcowym. Ma nieskoņczoną dģugoķæ i jest zdefiniowany przez kierunek (zwykle wyraŋony jako znormalizowany wektor; patrz rozdziaģ o wektorach w dalszej częķci tego rozdziaģu) i pochodzenie. Rycina 1.6 pokazuje promieņ umieszczony u žródģa. Segment linii jest fragmentem linii i jest zdefiniowany przez dwa punkty koņcowe. Rysunek pokazuje równieŋ odcinek linii zdefiniowany przez dwa punkty koņcowe p1 i p2.
Kąty
Kąt jest zdefiniowany jako miara rozbieŋnoķci dwóch promieni o tym samym pozątku.
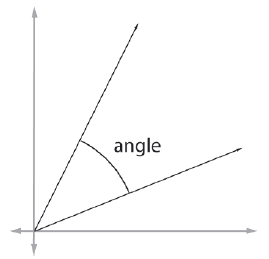
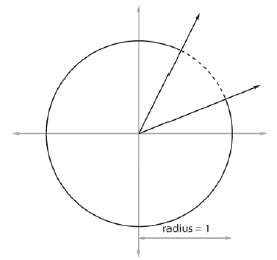
Moŋesz byæ przyzwyczajony do myķlenia o kątach w stopniach. Ķciany w większoķci domów mają zazwyczaj na przykģad kąty 90 stopni, a koģa mają 360 stopni. Matematycy wolą mierzyæ wielkoķæ kąta za pomocą radianów. Radiany są jednostką miary opartą na okręgu o promieniu jednostkowym - promieniu 1-wyķrodkowanym na początku. Promieņ koģa to odlegģoķæ od ķrodka koģa do jego obwodu. Rysując dwa promienie z rysunku powyŋej na tym samym schemacie co koģo jednostkowe, otrzymujemy rysunek poniŋej. Dģugoķæ odcinka zakrzywionej linii między dwoma promieniami - pokazana na schemacie jako linia przerywana - to kąt zmierzony w radianach między nimi
Teraz, gdy wiesz, co to jest radian, obliczmy, ile radianów jest w okręgu. Moŋesz pamiętaæ grecki symbol (pi) z czasów szkolnych. Jest to dobrze znana i często stosowana staģa matematyczna o wartoķci 3,14159 (do pięciu miejsc po przecinku). Za pomocą pi moŋna obliczyæ obwód koģa - odlegģoķæ na caģym obwodzie - za pomocą równania:
obwód = 2πr (1,39)
Wykorzystanie tego równania do okreķlenia obwodu koģa jednostkowego daje liczbę radianów w okręgu. Wynika to z faktu, ŋe liczba radianów w okręgu jest dģugoķcią obwodu koģa o promieniu 1. Więc zastępujemy 1 równaniem r w równaniu (1.39), aby otrzymaæ:
obwód = 2πr = 2π(1) = 2π = num radianów (1.40)
Dlatego w kaŋdym kręgu są 2π radiany
Teraz, gdy wiesz, ile radianów tworzy okrąg, moŋesz w razie potrzeby przeliczaæ między radianami i stopniami. Koģo ma 360 stopni, co oznacza:
360o = 2π radianów
Dzieląc obie strony przez 360 otrzymujemy:
1o = 2π/360 radianów
Kąty są zwykle oznaczone grecką literą theta, która wygląda następująco: θ
Trójkąty
Trójkąt skģada się z trzech odcinków linii poģączonych na ich koņcach. Wewnętrzne kąty trójkąta zawsze sumują się do radianów (180 stopni). Poniŋszej mamy opis róŋnych typówy trójkątów, które moŋna napotkaæ:
* Trójkąt równoboczny ma boki o równej dģugoķci. Trójkąty z tą wģaķciwoķcią mają równieŋ kąty o równej wielkoķci.
* Trójkąt równoramienny ma dwa boki i dwa równe kąty.
* Trójkąt prostokątny ma jeden kąt, który wynosi π/ 2 radianów (90 stopni) - kąt prosty. Kąt prosty jest zawsze reprezentowany przez ramkę.
* Wszystkie kąty wewnętrzne trójkąta ostrego są ostre (mniej niŋ π/2 radianów).
* Trójkąt rozwarty ma jeden kąt rozwarty (większy niŋ π/2 radianów)
Twierdzenie Pitagorasa
Trójkąty, z których będziesz najczęķciej korzystaæ, są odmiany o ksztaģcie prostopadģym. Mają wiele interesujących wģaķciwoķci, które moŋna dobrze wykorzystaæ. Byæ moŋe najsģynniejszą wģaķciwoķæ trójkątów prostokątnych odkryģ grecki matematyk Pitagoras, który ŋyģ od 569 do 475 p.n.e. Byģ naprawdę bardzo sprytnym facetem i najbardziej znany jest z tego, ŋe stwierdziģ:
Kwadrat przeciwprostokątnej trójkąta prostokątnego jest równy sumie kwadratów pozostaģych dwóch boków.
Przeciwprostokątna trójkąta jest jego najdģuŋszym bokiem, jak pokazano na rysunku poniŋej.
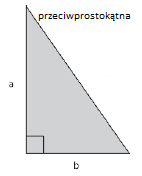
Jeķli przeciwprostokątna jest oznaczona jako h, twierdzenie Pitagorasa moŋna zapisaæ jako:
h2 = a2 + b2 (1.41)
Wykorzystanie pierwiastka kwadratowego z obu stron daje:
h = √ a2 + b 2 (1.42)
Oznacza to, ŋe jeķli znamy dģugoķæ dowolnych dwóch boków trójkąta prostokątnego, moŋemy ģatwo znaležæ trzeci.
Podczas pracy nad sztuczną inteligencją dla gier często uŋywasz twierdzenia Pitagorasa, aby obliczyæ, czy Agent A jest bliŋej obiektu niŋ Agent B. Zwykle wymagaģoby to dwóch wywoģaņ funkcji pierwiastka kwadratowego, która, jak wszyscy wiemy, jest powolne i naleŋy tego unikaæ, gdy tylko jest to moŋliwe. Na szczęķcie, porównując dģugoķci boków dwóch trójkątów, jeķli strona A jest większa niŋ strona B, to zawsze będzie większa, niezaleŋnie od tego, czy dģugoķci są kwadratowe, czy nie. Oznacza to, ŋe moŋemy uniknąæ pierwiastka kwadratowego i po prostu porównaæ wartoķci kwadratowe. Jest to znane jako praca w przestrzeni kwadratu i jest to coķ, co często zobaczysz w kodzie pokazanym u nas
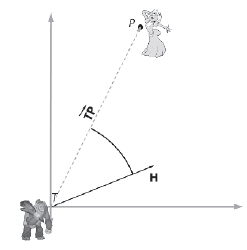
Praktyczny przykģad twierdzenia Pitagorasa
Zaģóŋmy, ŋe masz ģucznika na pozycji A(8,4) i jego cel na pozycji T(2,1). Ģucznik moŋe wystrzeliæ strzaģę maksymalnie na odlegģoķæ 10 jednostek. W związku z tym, aby ustaliæ, czy uda mu się trafiæ w cel, naleŋy obliczyæ odlegģoķæ między nimi. Ģatwo to ustaliæ za pomocą twierdzenia Pitagorasa. Najpierw obliczane są dģugoķci boków TP i AP pokazane na rysunku
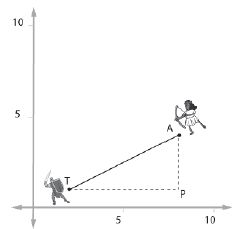
Aby znaležæ odlegģoķæ AP, skģadnik y pozycji ģucznika odejmuje się od skģadnika y pozycji celu:
AP = 4 - 1 = 3 (1.43)
Aby znaležæ odlegģoķæ TP, robimy to samo, ale z komponentami x:
TP = 8 - 2 = 6 (1.44)
Teraz, gdy TP i AP są znane, odlegģoķæ od ģucznika do celu moŋna obliczyæ za pomocą twierdzenia Pitagorasa:
TA = √AP2 + TP2 = √ 32 + 62 = √9+36 = 6,71 (1.45) Dobrze w docelowym zakresie. Niech ta strzaģa leci!
Tajemnice SohCahToa odsģonięte
Jeķli znasz dģugoķæ jednego z boków trójkąta prostokątnego i jeden z pozostaģych dwóch kątów, moŋesz okreķliæ wszystko inne o trójkącie za pomocą trygonometrii. Najpierw spójrz na rysunek. Pokazuje nazwy kaŋdej strony trójkąta prostokątnego.
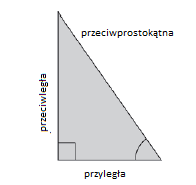
Strona naprzeciw kąta jest nazywana przeciwlegģą (zaskoczenie, niespodzianka), a strona leŋąca między kątem a kątem prostym jest znana jako przylegģa. Istnieją trzy funkcje trygonometryczne, które pomagają obliczyæ cechy trójkąta prostokątnego. Prawdopodobnie znasz ich ze szkoģy. Są sinus, cosinus i tangens i często są skracane do sin, cos i tan. Oto, co reprezentują:
sin( θ) = przeciwlegģa / przeciwprostokątna (1.46)
cos (θ) = przylegģa / przeciwprostokątna (1.47)
tan(θ ) = przeciwlegģa / przylegģa (1.48)
Gdy rozwiąŋesz którykolwiek z poniŋszych problemów na kalkulatorze, upewnij się, ŋe jest on ustawiony w radianach, a nie stopniach! Spójrz na rysunek
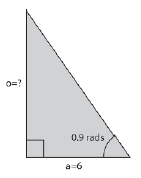
Chcemy obliczyæ dģugoķæ przeciwlegģą , biorąc pod uwagę dģugoķæ przylegģej i kąt. Z SohCahToa moŋemy pamiętaæ, ŋe tangens kąta jest równa przeciwlegģej podzielonej przez przylegģą. Trochę przestawienie równania daje nam:
o= aTan(θ) (1.49)
Więc wszystko, co musimy zrobiæ, aby uzyskaæ o, to wziąæ kalkulator (w celu ustalenia stycznej) i podģączyæ liczby, w ten sposób:
o = 6Tan(0.9) = 7.56 (1,50)
Buģka z masģem. Dobra, spróbujmy innego, tylko tym razem spróbujesz go najpierw rozwiązaæ. Oblicz dģugoķæ boku h pokazanego na rysunku poniŋej
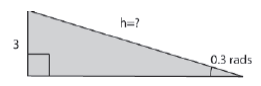
Udaģo ci się? W tym przykģadzie znamy kąt i odwrotnie. Pamiętając o SohCahToa, widzimy, ŋe naleŋy zastosowaæ funkcję sinusoidalną, poniewaŋ sinus kąta jest równy odwrotnoķci podzielonej przez przeciwprostokątną. Zmiana ukģadu równania daje:
h = o/sin(θ) (1.51)
A podģączenie liczb daje:
h = 3/sin(0.3) = 10.15 (1,52)
Jak na razie dobrze. Co powiesz na problem pokazany na poniŋszym rysunku? Tym razem musisz znaležæ kąt, biorąc pod uwagę dģugoķci przylegģej i przeciwprostokątnej
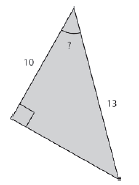
Tym razem naszym przyjacielem jest funkcja cosinus, ale podģączenie liczb stwarza problem.
cos(?) = 10/13 = 0.769 (1.53)
Wiemy, ŋe cosinus kąta wynosi 0,769, ale jaki jest sam kąt? Jak się tego dowiadujemy? Cóŋ, kąt okreķla się za pomocą odwrotnego cosinusa. Zwykle jest to zapisywane jako cos -1. Wszystko, co musisz zrobiæ, to uŋyæ odwrotnego przycisku cosinus na kalkulatorze (jeķli nie widzisz na kalkulatorze cos-1, byæ moŋe będziesz musiaģ nacisnąæ przycisk odwrotny przed przyciskiem cosinus), aby uzyskaæ wynik:
? = cos -1(0.769) = 0,693 radianów (1,54)
W tym momencie zakoņczę lekcję trygonometrii. Chociaŋ jest to obszerny temat, twierdzenie Pitagorasa i SohCahToa są teorią trygonometrii , której będziesz potrzebowaæ w dalszej częķci
Wektory
Podczas projektowania sztucznej inteligencji do gier będziesz często uŋywaæ matematyki wektorowej. Wektory są uŋywane wszędzie, od obliczania kierunku, w którym agent gry powinien wystrzeliæ, aŋ do wyraŋania wejķæ i wyjķæ sztucznej sieci neuronowej. Wektory są twoim przyjacielem. Powinieneķ je dobrze poznaæ. Nauczyģeķ się, ŋe punkt na pģaszczyžnie kartezjaņskiej moŋna wyraziæ jako dwie liczby, tak jak poniŋej: P = (x,y) (1,55)(1,55)
Zapisany wektor 2D wygląda prawie tak samo:
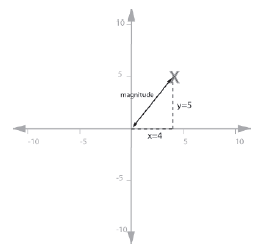
v = (x,y)(1,56)
Jednak chociaŋ jest podobny, wektor reprezentuje dwie cechy: kierunek i wielkoķæ. Prawa strona rysunku 1.16 pokazuje wektor (9, 6) znajdujący się w punkcie początkowym.
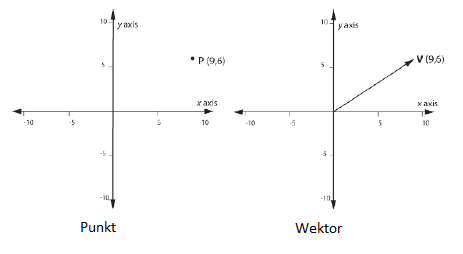
Wektory są zwykle oznaczone pogrubioną czcionką lub literą ze strzaģką nad nim. Poģoŋenie strzaģki wskazuje kierunek wektora, a dģugoķæ linii reprezentuje wielkoķæ wektora. W porządku, jak dotąd tak dobrze. Ale co to znaczy? Jakie to ma zastosowanie? Na początek wektor moŋe reprezentowaæ prędkoķæ pojazdu. Wielkoķæ wektora reprezentuje prędkoķæ pojazdu, a kierunek reprezentuje kierunek pojazdu. To caģkiem sporo informacji z zaledwie dwóch liczb (x, y). Wektory teŋ nie są ograniczone do dwóch wymiarów. Mogą mieæ w ogóle dowolny rozmiar. Uŋyģbyķ na przykģad wektora 3D (x, y, z), aby przedstawiæ prędkoķæ pojazdu poruszającego się w trzech wymiarach, jak helikopter. Rzuæmy okiem na niektóre rzeczy, które moŋesz zrobiæ z wektorami.
Dodawanie i odejmowanie wektorów
Wyobraž sobie, ŋe jesteķ uczestnikiem telewizyjnej gry reality. Stoisz na polanie w dŋungli. Obok ciebie stoi kilku innych konkurentów. Wszyscy jesteķcie bardzo zdenerwowani i podekscytowani, poniewaŋ zwycięzca poznaje Cameron Diaz a przegrani muszą oglądaæ. Pot ķcieka ci z czoģa, twoje ręce są lepkie, a ty rzucasz nerwowe spojrzenia na innych konkurentów. Opiekun telewizyjny z brązową brodą podchodzi do przodu i podaje kaŋdemu konkurentowi zģotą kopertę. Cofa się i kaŋe wam rozerwaæ koperty. Zwycięzcą zostanie pierwsza osoba, która wypeģni instrukcje. Szaleņczo odrywasz papier. W ķrodku jest notatka. To mówi: "Czekam na ciebie w tajnym miejscu. Pospiesz się, jest bardzo gorąco tutaj. Moŋesz dotrzeæ do lokalizacji, postępując zgodnie z wektorami (-5, 5), (0, -10), (13, 7), (-4, 3)… Cameron"
Z uķmiechem na twarzy patrzysz, jak reszta zawodników biegnie w kierunku pierwszego wektora. Wykonujesz kilka obliczeņ z tyģu koperty, a następnie leniwie spacerujesz w zupeģnie innym kierunku. Zanim inni konkurenci dotrą do kryjówki Camerona, pocąc się jak stary ser i z trudem ģapiąc oddech, sģyszą twoje zabawne chichoty i plusk chģodnej wody z prysznica Pokonaģeķ przeciwników, poniewaŋ wiedziaģeķ, jak dodawaæ wektory. Poniŋszy rysunek pokazuje trasę, którą przeszli pozostali konkurenci, postępując zgodnie z wektorami podanymi w notatce Cameron
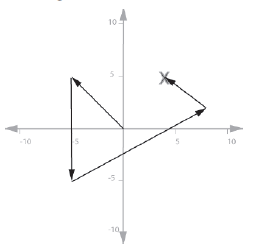
Wiedziaģeķ jednak, ŋe jeķli dodasz wszystkie wektory razem, otrzymasz w rezultacie pojedynczy wektor: ten, który zabierze cię bezpoķrednio do ostatecznego celu. Aby dodaæ wektory razem, wystarczy dodaæ wszystkie wartoķci x, aby otrzymaæ skģadową x wyniku, a następnie zrobiæ to samo z wartoķciami y, aby uzyskaæ skģadową y. Dodając razem cztery wektory w notatce Camerona, otrzymujemy:
new x = (-5) + (0) + (13) + (-4) = 4
new y = (5) + (-10) + (7) + (3) = 5 (1.57)
dając wektor (4, 5), dokģadnie taki sam wynik, jakbyķmy podąŋali za kaŋdym wektorem osobno. Zobacz rysunek
Mnoŋenie wektorów
Mnoŋenie wektorów jest bardzo proste. Wystarczy pomnoŋyæ kaŋdy skģadnik przez wartoķæ. Na przykģad wektor v (4, 5) pomnoŋony przez 2 wynosi (8, 10).
Obliczanie wielkoķci wektora
Wielkoķæ wektora to jego dģugoķæ. W poprzednim przykģadzie wielkoķæ wektora v(4, 5) to odlegģoķæ od punktu początkowego do kryjówki Cameron.
Moŋna to ģatwo obliczyæ za pomocą twierdzenia Pitagorasa.
wielkoķæ = √ 42 + 52 (1.58)
Gdybyķ miaģ trójwymiarowy wektor, uŋyģbyķ podobnego równania:
wielkoķæ = √ x2 + y2 + z2 (1.59)
Matematycy umieszczają dwa pionowe paski wokóģ wektora, aby zaznaczyæ jego dģugoķæ.
wielkoķæ = |v| (1,60)
Wektory normalizujące
Kiedy wektor jest znormalizowany, zachowuje swój kierunek, ale jego wielkoķæ jest ponownie obliczana, tak ŋe ma dģugoķæ jednostkową (dģugoķæ 1). W tym celu naleŋy podzieliæ kaŋdy skģadnik wektora przez wielkoķæ wektora. Matematycy piszą taką formuģę:
N = v/|v| (1.61)
Dlatego, aby znormalizowaæ wektor (4, 5), zrobiģbyķ to:
new x = 4 / 6.403 = 0.62
new y = 5 / 6.403 = 0.78 (1.62)
Moŋe to wydawaæ się dziwne dla wektora, ale w rzeczywistoķci znormalizowane wektory są niezwykle przydatne. Dowiesz się wkrótce.
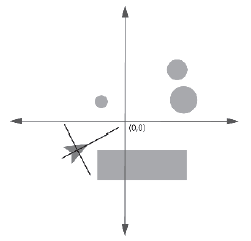
Rozwiązywanie wektorów
Moŋliwe jest uŋycie trygonometrii do rozdzielenia wektora na dwa oddzielne wektory, jeden równolegģy do osi x, a drugi do osi y. Spójrz na wektor v, reprezentujący pchnięcie myķliwca odrzutowego pokazanego na rysunku
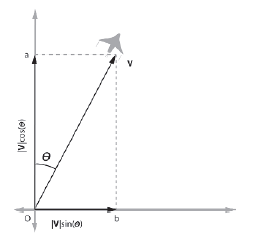
Aby rozdzieliæ v na jego skģadowe x / y, musimy znaležæ Oa i Ob. To da nam komponent ciągu samolotu, który dziaģa odpowiednio wzdģuŋ osi y, i komponent wzdģuŋ osi x, odpowiednio. Innym sposobem na okreķlenie tego jest to, ŋe Oa jest wielkoķcią siģy dziaģającej wzdģuŋ osi x, a Ob jest wielkoķcią wzdģuŋ osi y. Najpierw obliczmy siģę ciągu wzdģuŋ osi y: Oa. Z trygonometrii wiemy, ŋe:
cos (θ) = przylegģa / przeciwprostokątna = Oa / |v| (1.63)
Zmiana ukģadu daje:
Oa = |v| cos (θ) = skģadowa y (1.64)
Do obliczenia Ob stosuje się to równanie:
sin( θ) = przeciwlegģa / przeciwprostokątna (1.65)
Dające:
Ob = |v| sin( θ) = skģadowa x (1.66)
Iloczyn skalarny
Iloczyn skalarny podaje kąt między dwoma wektorami - coķ, co trzeba często obliczyæ podczas programowania AI. Biorąc pod uwagę dwa wektory 2D u i v, równanie wygląda następująco:
u • v = uxvx + uyvy (1.67)
Symbol • oznacza iloczyn skalarny. Równanie (1.67) nie daje nam jednak kąta. Obiecaģem kąt, więc dostaniesz go! Oto inny sposób obliczania iloczynu kropkowego:
u • v = |u||v|cos(θ)(1.68)
Zmiana ukģadu otrzymujemy:
cos(θ) = u • v / |u||v| (1.69)
Pamiętaj, ŋe pionowe linie otaczające wektor wskazują jego wielkoķæ. Nadszedģ czas, kiedy odkryjesz jedno z przydatnych zastosowaņ normalizacji wektorów. Jeķli zarówno v, jak i u są znormalizowane, równanie ogromnie upraszcza:
cos(θ) = u • v / 1 x 1 = u • v (1.70)
Podstawienie w równaniu z (1.67) po prawej stronie daje:
cos(θ) = u • v = uxvx + uyvy (1.71)
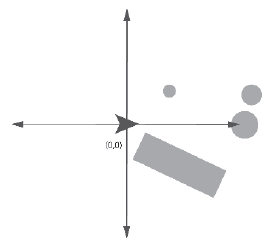
dając nam równanie kąta między wektorami. Jednym wielkim zastosowaniem produktu kropkowego jest to, ŋe szybko powie ci, czy jeden byt jest za czy przed pģaszczyzną skierowaną w stronę drugiego. Jak to? Zobacz rysunek poniŋej
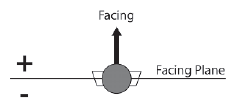
Na rysunku pokazano agenta gry skierowanego bezpoķrednio na póģnoc. Linia pozioma odnosi się do agenta i opisuje pģaszczyznę skierowaną do agenta. Wszystko, co znajduje się przed tą linią, moŋna powiedzieæ, ŋe znajduje się przed agentem. Za pomocą iloczynu skalarnego ģatwo jest ustaliæ, czy obiekt znajduje się przed czy za agentem. Iloczynskalarny wektora skierowanego do agenta i wektora od agenta do obiektu będzie dodatni, jeķli obiekt znajdzie się przed pģaszczyzną skierowaną do agenta, a ujemny, jeķli będzie z tyģu.
Praktyczny przykģad matematyki wektorowej
Oto przykģad niektórych metod wektorowych, których nauczyģeķ się o wspólnej pracy. Zaģóŋmy, ŋe masz agenta gry, Trolla Erica, który stoi w pozycji T (początek) i jest zwrócony w kierunku znormalizowanym wektorem H (na kurs). Czuje zapach bezradnej księŋniczki w pozycji P i bardzo chciaģby rzuciæ w nią paģką, delikatnie ją zmiękczyæ, zanim rozerwie ją na kawaģki. Aby to zrobiæ, musi wiedzieæ, ile radianów musi obróciæ, aby się z nią zmierzyæ. Poniŋszy rysunek pokazuje sytuację.
Odkryģeķ, ŋe moŋesz obliczyæ kąt między dwoma wektorami za pomocą iloczynu skalarnego. Jednak w tym problemie masz tylko jeden wektor, H. Dlatego musimy okreķliæ wektor
 - wektor, który wskazuje bezpoķrednio na księŋniczkę. Oblicza się to odejmując punkt T od punktu P. Poniewaŋ T jest na początku (0, 0), w tym przykģadzie P - T = P. Jednak odpowiedž P - T jest wektorem, więc pokaŋmy to, wpisując go pogrubioną czcionką i nazywając ją P. Wiemy, ŋe cosinus kąta, który troll musi obróciæ w stronę księŋniczki, jest równowaŋny iloczynowi H i P, pod warunkiem, ŋe oba wektory są znormalizowane. H jest juŋ znormalizowany, więc musimy tylko znormalizowaæ P. Pamiętaj, aby znormalizowaæ wektor, jego skģadniki są podzielone przez jego wielkoķæ. W związku z tym normalna P (NP) wynosi
- wektor, który wskazuje bezpoķrednio na księŋniczkę. Oblicza się to odejmując punkt T od punktu P. Poniewaŋ T jest na początku (0, 0), w tym przykģadzie P - T = P. Jednak odpowiedž P - T jest wektorem, więc pokaŋmy to, wpisując go pogrubioną czcionką i nazywając ją P. Wiemy, ŋe cosinus kąta, który troll musi obróciæ w stronę księŋniczki, jest równowaŋny iloczynowi H i P, pod warunkiem, ŋe oba wektory są znormalizowane. H jest juŋ znormalizowany, więc musimy tylko znormalizowaæ P. Pamiętaj, aby znormalizowaæ wektor, jego skģadniki są podzielone przez jego wielkoķæ. W związku z tym normalna P (NP) wynosi
NP = P/|P| (1.72)
Iloczynu skalarnego moŋna teraz uŋyæ do okreķlenia kąta.
cos(θ) = NP • H(1.73)
Więc
θ = cos-1 (NP • H)(1.74)
Aby wyjaķniæ ten proces, zróbmy to jeszcze raz, ale z pewnymi liczbami. Powiedzmy, ŋe troll znajduje się na początku T (0, 0) i ma nagģówek H (1, 0). Księŋniczka stoi w punkcie P (4, 5). Ilu radianów musi odwróciæ troll, by stanąæ twarzą w twarz z księŋniczką? Wiemy, ŋe moŋemy uŋyæ równania (1.74) do obliczenia kąta, ale najpierw musimy ustaliæ wektor TP między trollem a księŋniczką i znormalizowaæ go. Aby uzyskaæ TP, odejmujemy T od P, otrzymując wektor (4, 5). Aby znormalizowaæ TP, dzielimy go wedģug jego wielkoķci. Obliczenia te pokazano wczeķniej w równaniu (1,62), co daģo wynik NTP (0,62; 0,78). Na koniec wstawiamy liczby do równania (1.74), zastępując równanie (1.71) iloczynem skalarnym.
θ = cos-1 (NTP • H)
θ = cos-1 ((0,.62x1)) + ((0.78 x 0))
θ = cos-1(0.62)
θ = 0.902 radianów
Struktura Vector2D
Wszystkie przykģady podane w tej ksiąŋce wykorzystują strukturę Vector2D. Jest to bardzo proste i realizuje wszystkie omówione operacje wektorowe. Wymienię tutaj większoķæ jej deklaracji, abyķ mógģ się z nią zapoznaæ.
struct Vector2D
{
double x;
double y;
Vector2D():x(0.0),y(0.0){}
Vector2D(double a, double b):x(a),y(b){}
//ustawia x i y na zero
inline void Zero();
//zwraca wartoķæ true, jeķli zarówno x, jak i y są równe zero
inline bool isZero()const
//zwraca dģugoķæ wektora
inline double Length()const;
//zwraca kwadratową dģugoķæ wektora (unikając w ten sposób sqrt)
inline double LengthSq()const;
inline void Normalize();
// zwraca iloczyn skalrny tego i v2
inline double Dot(const Vector2D& v2)const;
//zwraca wartoķæ dodatnią, jeķli v2 jest zgodny z ruchem wskazówek zegara od tego wektora,
// ujemny, jeķli jest przeciwny do ruchu wskazówek zegara (zakģadając, ŋe oķ Y jest skierowana w dóģ,
//oķ X po prawej jak aplikacja Windows) inline int Sign(const Vector2D& v2)const;
//zwraca wektor, który jest prostopadģy do tego
inline Vector2D Perp()const;
//dostosowuje x i y, aby dģugoķæ wektora nie przekraczaģa max
inline void Truncate(double max);
//zwraca odlegģoķæ między tym wektorem a tym przekazanym jako parametr
inline double Distance(const Vector2D &v2)const;
//kwadratowa wersja powyŋszego
inline double DistanceSq(const Vector2D &v2)const;
//zwraca wektor będący odwrotnoķcią tego wektora
inline Vector2D GetReverse()const;
//potrzebujemy operatorów
const Vector2D& operator+=(const Vector2D &rhs);
const Vector2D& operator-=(const Vector2D &rhs);
const Vector2D& operator*=(const double& rhs);
const Vector2D& operator/=(const double& rhs;
bool operator==(const Vector2D& rhs)const;
bool operator!=(const Vector2D& rhs)const;
};
Przestrzeņ lokalna i przestrzeņ ķwiata
Waŋne jest, aby zrozumieæ róŋnicę między przestrzenią lokalną a przestrzenią ķwiata. Reprezentacja przestrzeni ķwiata jest zwykle tym, co widzisz renderowane na ekranie. Kaŋdy obiekt jest okreķlony pozycją i orientacją względem początku ķwiatowego ukģadu wspóģrzędnych. Ŋoģnierz wykorzystuje przestrzeņ ķwiata, gdy na przykģad opisuje pozycję czoģgu z odniesieniem do siatki.
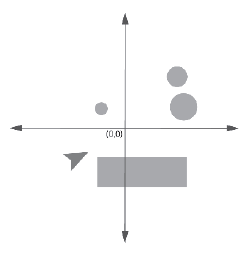
Lokalna przestrzeņ opisuje jednak poģoŋenie i orientację obiektów względem lokalnego ukģadu wspóģrzędnych okreķlonego podmiotu. W dwóch wymiarach lokalny ukģad wspóģrzędnych obiektu moŋna zdefiniowaæ za pomocą wektora skierowanego i wektora bocznego (reprezentującego odpowiednio lokalną oķ x i y), z punktem początkowym umieszczonym w ķrodku elementu (dla trzech wymiarów dodatkowy wymagany jest wektor). Rysunek 1.24 pokazuje oķ opisującą lokalny ukģad wspóģrzędnych obiektu w ksztaģcie strzaģki
Za pomocą tego lokalnego ukģadu wspóģrzędnych moŋemy przeksztaģciæ ķwiat, tak aby wszystkie znajdujące się w nim obiekty opisaģy swoją pozycję i orientację względem niego. To jest jak oglądanie ķwiata oczami istoty. Ŋoģnierze uŋywają miejscowej przestrzeni, gdy mówią takie rzeczy, jak "Cel 50 metrów od siebie o godzinie 10". Opisują lokalizację celu w stosunku do wģasnej pozycji i kierunku skierowania.
Ta zdolnoķæ do przeksztaģcania obiektów między przestrzenią lokalną a ķwiatową moŋe uproķciæ wiele obliczeņ, jak zobaczymy póžniej.
Fizyka
Mój sģownik definiuje fizykę jako:
"Nauka o materii i energii oraz interakcje między nimi"
Jako programista gier AI często będziesz pracowaæ z prawami fizyki, a zwģaszcza z poruszaniem się, o czym będzie mowa. Często zdarza się, ŋe tworzysz algorytmy do przewidywania, gdzie w przyszģoķci będzie znajdowaæ się obiekt lub agent, do obliczania najlepszego kąta strzaģu broni lub kierunku i siģy, którą agent powinien kopnąæ piģkę, aby podaæ do odbiorcy. To oczywiķcie nie jest sztuczna inteligencja, ale wszystko to jest częķcią iluzji inteligencji i zwykle stanowi częķæ obciąŋenia programisty AI, więc musisz znaæ te rzeczy. Rzuæmy okiem na niektóre podstawowe pojęcia stosowane w fizyce.
Czas
Czas jest wielkoķcią skalarną (caģkowicie okreķloną przez wielkoķæ i bez kierunku), mierzoną w sekundach, w skrócie s. Do niedawna definiowano sekundę w kategoriach rotacji obrotowej Ziemi, ale poniewaŋ obroty Ziemi nieznacznie zwalniają co roku, pod koniec lat szeķædziesiątych staģo się to problematyczne dla naukowców, którzy potrzebowali coraz bardziej precyzyjnych pomiarów w swoich eksperymentach. Dzisiaj zatem sekundę mierzy się jako:
Czas trwania 9 192 621,770 okresów promieniowania odpowiadających przejķciu między dwoma hiper drobnymi poziomami stanu podstawowego atomu cezu 133.
Ta definicja zapewnia dzisiejszym naukowcom staģy przedziaģ czasu wymagany do ich precyzyjnych eksperymentów. Czas w grach komputerowych jest mierzony na jeden z dwóch sposobów: w sekundach (tak jak w prawdziwym ķwiecie) lub przy uŋyciu odstępu czasu między aktualizacjami jako rodzaj wirtualnej sekundy. Ten ostatni pomiar moŋe uproķciæ wiele równaņ, ale musisz byæ ostroŋny, poniewaŋ, chyba ŋe szybkoķæ aktualizacji jest zablokowany, fizyka będzie się róŋniæ między maszynami o róŋnych prędkoķciach!
Dlatego jeķli zdecydujesz się uŋyæ wirtualnej sekundy, upewnij się, ŋe częstotliwoķæ aktualizacji fizyki gry jest zablokowana na rozsądnym poziomie - zwykle jest to szybkoķæ najwolniejszej maszyny, dla której się rozwijasz.
Nie tak dawno temu większoķæ gier komputerowych uŋywaģa staģej liczba klatek na sekundę i kaŋdy element - rendering, fizyka, sztuczna inteligencja itp. - byģ aktualizowany z tą samą częstotliwoķcią. Wiele wspóģczesnych wyrafinowanych gier okreķla jednak niepowtarzalną stawkę dla kaŋdego elementu. Na przykģad fizyka moŋe byæ aktualizowana 30 razy na sekundę, AI 10 razy na sekundę, a kod renderowania moŋe dziaģaæ tak szybko, jak maszyna, na której dziaģa. Dlatego za kaŋdym razem, gdy mówię o "częstoķci aktualizacji" w tekķcie, jeķli nie okreķlę kontekstu, będzie to w kontekķcie tematu, o którym mówię.
Odlegģoķæ
Standardową jednostką odlegģoķci - wielkoķci skalarnej - jest to metr , w skrócie m.
Masa
Masa jest wielkoķcią skalarną mierzoną w kilogramach, w skrócie do kg. Masa jest miarą iloķci czegoķ. Moŋe to byæ myląca jakoķæ do zmierzenia, poniewaŋ masę obiektu oblicza się przez jego zwaŋenie, ale masa nie jest jednostką masy; jest to jednostka materii. Cięŋar obiektu jest miarą siģy grawitacji dziaģającej na ten obiekt. Poniewaŋ grawitacja zmienia się w zaleŋnoķci od miejsca (nawet tutaj na Ziemi), oznacza to, ŋe cięŋar obiektu moŋe się róŋniæ w róŋnych miejscach, nawet jeķli jego masa nigdy się nie zmienia. Jak więc dokģadnie zmierzyæ masę? Naukowcy pokonali ten problem, tworząc cylinder platynowo-irydowy, który wszyscy zgodzili się nazywaæ THE kilogram. Ten cylinder jest przechowywany w Paryŋu i wszystkie pomiary są wykonywane względem niego. Innymi sģowy, moŋesz udaæ się do Francji i zrobiæ swój wģasny duplikat, który waŋy dokģadnie tyle samo, co THE kilogram. Teraz wiesz, ŋe gdziekolwiek się znajdujesz, bez względu na grawitację, twój duplikat będzie miaģ dokģadnie taką samą masę jak THE kilogram we Francji. Problem rozwiązany
Pozycja
Moŋesz myķleæ, ŋe pozycja obiektu jest ģatwą do zmierzenia wģaķciwoķcią, ale skąd dokģadnie mierzysz jego pozycję? Na przykģad, jeķli chcesz okreķliæ pozycję ciaģa w przestrzeni, skąd wziąģbyķ pomiar? Czy byģoby to z twoich stóp, brzucha czy gģowy? Stanowi to problem, poniewaŋ istniaģaby duŋa rozbieŋnoķæ między pozycją gģowy a pozycją stóp. Fizycy rozwiązują ten problem, przyjmując poģoŋenie ķrodka masy obiektu za jego pozycję. Ķrodek masy jest punktem równowagi obiektu. Byģoby to miejsce, w którym moŋna przymocowaæ wyimaginowany kawaģek sznurka do obiektu i balansowaģby w dowolnej pozycji. Innym dobrym sposobem myķlenia o ķrodku masy jest to, ŋe jest to ķrednia lokalizacja caģej masy w ciele.
Prędkoķæ
Prędkoķæ jest wielkoķcią wektorową (wielkoķcią, która ma wielkoķæ i kierunek), która wyraŋa szybkoķæ zmiany odlegģoķci w czasie. Standardową jednostką miary prędkoķci są metry na sekundę, w skrócie m / s. Moŋna to wyraziæ matematycznie jako:
v = ∆x / ∆ t(1.75)
Wielka litera grecka ∆, czytana jako delta, jest uŋywana w matematyce do oznaczania zmiany iloķci. Dlatego ∆t w równaniu (1,75) reprezentuje zmianę czasu (przedziaģ czasu), a ∆x zmianę odlegģoķci (przemieszczenie). oblicza się jako iloķæ po odjęciu minus iloķæ przed. Dlatego jeķli pozycja obiektu przy t = 0 wynosi 2 (przed), a przy t = 1 wynosi 5 (po), ∆x wynosi 5 - 2 = 3. Moŋe to równieŋ powodowaæ wartoķci ujemne. Na przykģad, jeķli pozycja obiektu przy t = 0 wynosi 7 (przed), a przy t = 1 wynosi 3 (po), ∆x wynosi 3 - 7 = -4.
UWAGA Mģodszy brat Delty, delta maģymi literami, zapisany jako δ, jest uŋywany do przedstawienia bardzo maģych zmian. Często widzisz δuŋywane w rachunku róŋniczkowym. Poniewaŋ wygląda podobnie do litery d, aby zapobiec nieporozumieniom, matematycy zwykle unikają uŋywania d do reprezentowania odlegģoķci lub przesunięcia w swoich równaniach. Zamiast tego uŋywany jest mniej niejednoznaczny symbol, taki jak ∆ x.
Za pomocą równania (1.75) ģatwo jest obliczyæ ķrednią prędkoķæ obiektu. Powiedzmy, ŋe chcesz obliczyæ ķrednią prędkoķæ piģki toczącej się między dwoma punktami. Najpierw obliczyæ przesunięcie między dwoma punktami, a następnie podzieliæ przez czas potrzebny piģce na pokonanie tej odlegģoķci. Na przykģad, jeķli odlegģoķæ między punktami wynosi 5 m, a czas potrzebny na przemieszczenie piģki między punktami wynosi 2 s, wówczas prędkoķæ wynosi:
v = 5/2 = 2.5 m/s(1.76)
Ģatwo jest równieŋ obliczyæ, jak daleko przeszedģ obiekt, jeķli go znamy ķrednią prędkoķæ i czas podróŋy. Zaģóŋmy, ŋe jedziesz samochodem z prędkoķcią 35 km / h i chcesz wiedzieæ, jak daleko się przeszedģeķ w ciągu ostatnich póģ godziny. Zmiana ukģadu równania (1.75) daje:
Δ x = vΔ t(1.77)
Podanie liczb daje:
przebyta odlegģoķæ = 35 x1/2 = 17.5 mil(1.78)
Odnosząc się do gier komputerowych, jeķli masz pojazd w pozycji P w czasie t poruszający się ze staģą prędkoķcią V, moŋemy obliczyæ jego pozycję w następnym kroku aktualizacji (w czasie t + 1) przez:
Pt+1 = Pt + VΔt(1.79)
Gdzie VΔt oznacza przesunięcie między krokami aktualizacji (z równania (1.77)). Wyjaķnijmy to, pokazując przykģadowy kod. Poniŋej znajduje się lista klas pojazdów, która opisuje ruch pojazdu poruszającego się ze staģą prędkoķcią.
class Vehicle
{
//wektor reprezentujący jego pozycję w przestrzeni
vector m_vPosition;
//wektor reprezentujący jego prędkoķæ
vector m_vVelocity;
public:
//wywoģaģ kaŋdą ramkę, aby zaktualizowaæ pozycję pojazdu
void Update(float TimeElapsedSinceLastUpdate)
{
m_vPosition += m_vVelocity * TimeElapsedSinceLastUpdate;
}
};
Zauwaŋ, ŋe jeķli twoja gra uŋywa staģej częstotliwoķci aktualizacji fizyki, podobnie jak wiele przykģadów , Δt będzie staģy i moŋe zostaæ wyeliminowany z równania. Powoduje to uproszczoną metodę aktualizacji w następujący sposób:
// aktualizacja do symulacji przy uŋyciu staģego kroku aktualizacji
void Vehicle :: Update ()
{
m_vPosition + = m_vVelocity;
}
Pamiętaj jednak, ŋe jeķli zdecydujesz się na wyeliminowanie tego w ten sposób, jednostką czasu, której będziesz uŋywaæ w jakichkolwiek obliczeniach, nie jest juŋ drugi, ale raczej odstęp czasu między krokami aktualizacji.
Przyķpieszenie
Przyspieszenie to wielkoķæ wektorowa, która wyraŋa szybkoķæ zmiany prędkoķci w czasie i jest mierzona w metrach na sekundę na sekundę, zapisywana jako m / s2. Przyspieszenie moŋna wyraziæ matematycznie jako:
a = Δv / Δt (1.80)
To równanie mówi, ŋe przyspieszenie jest równowaŋne zmianie prędkoķci obiektu podzielonej przez przedziaģ czasu, podczas którego nastąpiģa zmiana prędkoķci. Na przykģad, jeķli samochód zaczyna od spoczynku i przyspiesza z prędkoķcią 2 m / s2, wówczas co sekundę do prędkoķci dodaje się 2 m / s. Tabela
Czas (y) : Prędkoķæ (m / s)
0 : 0
1 : 2
2 : 4
3 : 6
4 : 8
5 : 10
Rysując te dane na wykresie prędkoķci w funkcji czasu, otrzymujemy rysunek poniŋej.
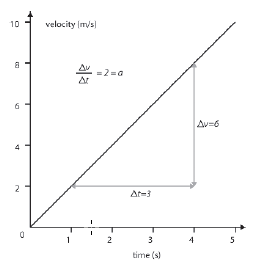
Jeķli zbadamy przedziaģ czasu, powiedzmy przedziaģ między t = 1 i t = 4, moŋemy zobaczyæ, ŋe gradient nachylenia, podany przez Δv / Δt, jest równowaŋny przyspieszeniu w tym przedziale.
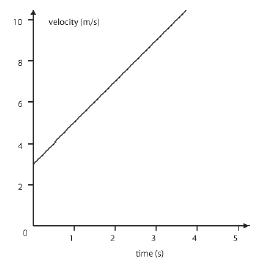
Nauczyģeķ się wczeķniej, jak równanie y = mx + c definiuje wszystkie linie proste na pģaszczyžnie kartezjaņskiej 2D, gdzie m jest gradientem ic przecięciem na osi y. Poniewaŋ na podstawie rysunku powyŋej moŋemy wywnioskowaæ, ŋe staģe przyspieszenie jest zawsze wykreķlane jako linia prosta, moŋemy odnieķæ to równanie do przyspieszenia samochodu. Wiemy, ŋe oķ y reprezentuje prędkoķæ, v, a oķ x reprezentuje czas, t. Wiemy równieŋ, ŋe gradient m odnosi się do przyspieszenia. To daje równanie:
v= at + u (1.81)
Staģa u reprezentuje prędkoķæ samochodu w czasie t = 0, co moŋna przedstawiæ jako przecięcie linii na osi y. Na przykģad, jeķli samochód w przykģadzie wystartowaģ z prędkoķcią 3 m / s, wówczas wykres byģby identyczny, ale przesunięty w górę o 3, jak pokazano na rysunku poniŋej
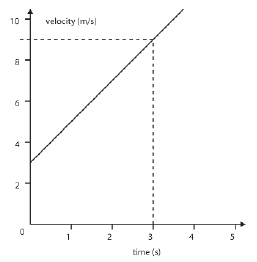
Aby przetestowaæ równanie, ustalmy, jaka będzie prędkoķæ samochodu rozpoczynająca się od prędkoķci 3 m / s i przyspieszająca przy 2 m / s2 po 3 sekundach. Wprowadzenie liczb do równania (1.81) daje:
v = 2 x 3 +3
v = 9 m/s (1.82)
To wģaķnie moŋemy wywnioskowaæ z wykresu.
Kolejną interesującą rzeczą związaną z wykresem prędkoķci i czasu jest to, ŋe obszar pod wykresem między dwa razy jest równowaŋny odlegģoķci przebytej przez obiekt w tym czasie. Najpierw spójrzmy na prosty przykģad. Poniŋszy rysunek pokazuje wykres zaleŋnoķci czasu od prędkoķci dla pojazdu, który spędza 2 sekundy przy prędkoķci 4 m / s, a następnie zatrzymuje się
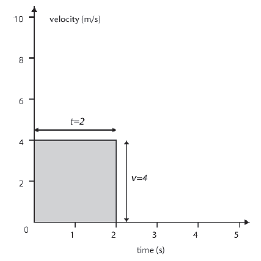
Obszar pod wykresem (obszar zacieniowany na szaro) jest okreķlony przez szerokoķæ, która jest równowaŋna czasowi prędkoķci, który, jak widaæ, daje wynik 8 metrów. Jest to ten sam wynik z zastosowania równania x = v Δt. Poniŋszy rysunek pokazuje przykģad z wczeķniejszego okresu, w którym pojazd przyspiesza od spoczynku ze staģym przyspieszeniem 2 m / s2. Powiedzmy, ŋe chcielibyķmy obliczyæ odlegģoķæ przebytą między czasami t = 1 it = 3
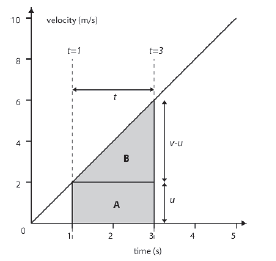
Wiemy, ŋe odlegģoķæ przebyta między t = 1 i t = 3 to obszar pod wykresem między tymi czasami. Jak wyražnie pokazano na rysunku, jest to suma obszarów prostokąta A i trójkąta B. Obszar A jest okreķlony przez przesunięcie czasowe, t, pomnoŋone przez prędkoķæ początkowa, u, zapisana jako:
Obszar A = Δt x u (1.83)
Obszar B, trójkąta, jest poģową pola prostokąta opisanego przez boki trójkąta. Boki trójkąta podane są przez przesunięcie czasowe, t oraz róŋnicę między prędkoķcią koņcową a prędkoķcią początkową, v - u. Moŋna to zapisaæ jako:
Obszar(B) = 1/2 ⋅ (v-u)Δt(1.84)
Dlatego caģkowity obszar pod wykresem między czasami t = 1 it = 3, który jest równowaŋny przebytej odlegģoķci, jest sumą tych dwóch skģadników, podanych jako:
Δx = uΔt + 1/2 ⋅(v-u)Δt (1.85)
v- u = Δv = aΔt (1.86)
Wartoķæ v - u moŋna podstawiæ do równania (1.85), aby uzyskaæ równanie, które odnosi odlegģoķæ do czasu i przyspieszenia.
Δx = uΔt + 1/2 ⋅aΔt2(1.87)
Umieszczenie liczb w tym równaniu daje:
Δx = 2 x 2 + 1 / 2 x 2 x 22
Δx = 4 + 4
Δx = 8 m (1.88)
Za pomocą tego równania moŋemy zrobiæ kolejną przydatną rzecz: Moŋemy uwzględniæ czas, aby uzyskaæ równanie dotyczące prędkoķci i przebytej odlegģoķci. Oto jak. Z równania (1.81) wiemy, ŋe:
Δt = v- u / a (1.89)
Moŋemy zastąpiæ tę wartoķæ Δt równaniem (1.87), aby uzyskaæ:
Δx = u( v-u/a) + 1/2 ⋅a(v-u/a)2 (1.90)
To paskudnie wyglądające równanie moŋna znacznie uproķciæ. (Jeķli dopiero zaczynasz przygodę z algebrą, sugeruję próbę uproszczenia jej samemu.
v2 = u2 + 2aΔ(1.91)
To równanie jest niezwykle przydatne. Na przykģad moŋemy go uŋyæ do ustalenia, jak szybko piģka upuszczona ze szczytu Empire State Building będzie podróŋowaæ, gdy uderzy o ziemię (zakģadając brak oporu powietrza z powodu wiatru lub prędkoķci). Przyspieszenie spadającego obiektu wynika z siģy wywieranej na niego przez pole grawitacyjne Ziemi i jest równowaŋne okoģo 9,8 m / s2. Prędkoķæ początkowa piģki wynosi 0, a wysokoķæ Empire State Building wynosi 381 m. Umieszczenie tych wartoķci w równaniu daje:
v2 = 02 + 2 x 9,8 x 381
v = √7467,6
v= 86,41 m/s (1.92)
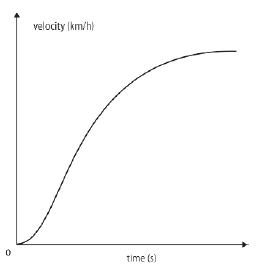
Powyŋsze równania są prawdziwe dla wszystkich obiektów poruszających się ze staģym przyspieszeniem, ale oczywiķcie moŋliwe jest równieŋ poruszanie się obiektów z róŋnym przyspieszeniem. Na przykģad, samolot podczas startu z pasa startowego ma wysokie przyspieszenie na początku swojego biegu (które odczuwasz jako siģę popychającą cię do oparcia siedzenia), która zmniejsza się w miarę osiągania limitów mocy silnika . Ten rodzaj przyspieszenia wyglądaģby mniej więcej tak, jak pokazano na rysunku
Jako kolejny przykģad, poniŋszy rysunek pokazuje wykres prędkoķci w funkcji czasu dla samochodu, który przyspiesza do 30 km / h, hamuje gwaģtownie, aby uniknąæ zbģąkanego psa, a następnie przyspiesza z powrotem do 30 km / h.
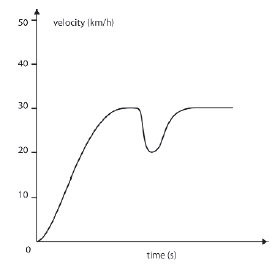
Gdy masz róŋne przyspieszenia, takie jak te, moŋesz okreķliæ przyspieszenie tylko w okreķlonym czasie. Osiąga się to poprzez obliczenie gradientu stycznej do krzywej w tym punkcie.
Siģa
Wedģug Isaaca Newtona: Odciķnięta siģa to dziaģanie wywierane na ciaģo w celu zmiany jego stanu, albo spoczynku, albo równomiernego ruchu we wģaķciwej linii.
Dlatego siģa jest tą jakoķcią, która moŋe zmieniæ prędkoķæ obiektu lub linię ruchu. Siģa nie ma jednak nic wspólnego z samym ruchem. Na przykģad latająca strzaģa nie potrzebuje staģej siģy przyģoŋonej do niej, aby mogģa lataæ (jak sądziģ Arystoteles). Siģa jest obecna tylko tam, gdzie zachodzą zmiany ruchu, takie jak zatrzymanie strzaģy przez obiekt lub gdy kierowca przeciągający przyspiesza wzdģuŋ paska. Jednostką siģy jest Newton, w skrócie N, i jest zdefiniowany jako:
Siģa potrzebna do przesunięcia masy kilogramowej z spoczynku do prędkoķci jednego metra na sekundę w ciągu jednej sekundy.
Istnieją dwa róŋne rodzaje siģ: siģy kontaktowe i bezdotykowe. Siģy kontaktowe występują między dotykającymi się obiektami, takimi jak siģa tarcia występująca między ķniegiem a nartami zjazdowego narciarza. Siģy bezkontaktowe to takie, które występują między obiektami, które się nie stykają, takie jak siģa grawitacji Ziemi na ciele lub siģa magnetyczna Ziemi na igle kompasu. Naleŋy zauwaŋyæ, ŋe wiele siģ moŋe oddziaģywaæ na pojedynczy obiekt jednoczeķnie. Jeķli suma tych siģ jest równa zero, obiekt pozostaje w ruchu z tą samą prędkoķcią w tym samym kierunku. Innymi sģowy, jeķli obiekt jest nieruchomy lub porusza się w linii prostej ze staģą prędkoķcią, suma wszystkich dziaģających na niego siģ musi wynosiæ zero. Jeķli jednak suma siģ nie jest równa zero, obiekt przyspieszy w kierunku siģy wynikowej. Moŋe to byæ mylące, szczególnie w odniesieniu do obiektów statycznych. Na przykģad, w jaki sposób siģy dziaģające na jabģko siedzące na stole? W koņcu się nie rusza! Odpowiedž jest taka, ŋe na jabģko
dziaģają dwie siģy: siģa grawitacji próbuje przyciągnąæ jabģko do Ziemi i równa i przeciwna siģa od stoģu odsuwa je od Ziemi. To dlatego jabģko pozostaje nieruchome.
Wiemy, ŋe jeķli suma siģ dziaģających na obiekt jest róŋna od zera, przyspieszenie będzie przekazywane w kierunku siģy; ale ile przyspieszenia? Odpowiedž jest taka, ŋe wielkoķæ przyspieszenia a jest proporcjonalna do masy obiektu, m, i do przyģoŋonej siģy caģkowitej, F. Zaleŋnoķæ tę podaje równanie:
a = F/m (1.93)
Częķciej jednak zobaczysz to równanie zapisane jako:
F = ma (1.94)
Korzystając z tego równania, jeķli wiemy, jak szybko obiekt przyspiesza i jego masa, moŋemy obliczyæ caģkowitą siģę dziaģającą na niego. Wykorzystując równania siģy, przyspieszenia, prędkoķci i poģoŋenia, jeķli wiemy, ile siģy dziaģa na obiekt, moŋemy okreķliæ przyspieszenie wynikające z tej siģy i odpowiednio zaktualizowaæ poģoŋenie i prędkoķæ obiektu. Zaģóŋmy na przykģad, ŋe masz klasę statku kosmicznego z atrybutami masy, aktualnej prędkoķci i aktualnej pozycji. Coķ takiego:
class SpaceShip
{
private:
vector m_Position;
vector m_Velocity;
float m_fMass;
public:
};
Biorąc pod uwagę odstęp czasu od ostatniej aktualizacji i siģę, którą naleŋy zastosowaæ, moŋemy stworzyæ metodę, która aktualizuje pozycję i prędkoķæ statku. Oto jak:
void SpaceShip::Update(float TimeElapsedSinceLastUpdate, float ForceOnShip)
{
float acceleration = ForceOnShip / m_fMass;
Przede wszystkim obliczyæ przyspieszenie wynikające z siģy za pomocą równania (1.93)
m_Velocity += acceleration * TimeElapsedSinceLastUpdate;
Następnie zaktualizuj prędkoķæ przyspieszenia za pomocą równania (1.80)
m_vPosition += m_Velocity * TimeElapsedSinceLastUpdate;
}
Na koniec pozycję moŋna zaktualizowaæ za pomocą zaktualizowanej prędkoķci za pomocą równania (1.77).