Symulacja Piģki Noŋnej
Projektowanie sztucznej inteligencji druŋynowej, a zwģaszcza AI do gry w piģkę noŋną, nie jest ģatwe. Stworzenie agentów zdolnych do gry w coķ podobnego do ich profesjonalnych ludzkich odpowiedników wymaga cięŋkiej pracy. Wiele zaawansowanych technicznie druŋyn z wybitnych uniwersytetów z caģego ķwiata rywalizuje w robotycznym turnieju piģkarskim Robocup od początku lat dziewięædziesiątych. Chociaŋ ambitnym celem turnieju jest produkcja robotów zdolnych do wygrania Pucharu Ķwiata do roku 2050 (nie ŋartuję), istnieje równieŋ symulacja turnieju piģkarskiego równolegģego do robota, w którym rywalizują druŋyny symulowanych piģkarzy na wirtualnej murawie . Wiele z tych druŋyn korzysta z najnowoczeķniejszej technologii sztucznej inteligencji, z których większoķæ zostaģa opracowana specjalnie dla piģki noŋnej. Gdybyķ miaģ wziąæ udziaģ w turnieju, usģyszaģbyķ, między okrzykami i jękami, zespoģy dyskutujące o zaletach uczenia się rozmytego-Q, projektowaniu wykresów koordynacji dla wielu agentów i pozycjonowaniu strategicznym opartym na sytuacji. Na szczęķcie, jako programiķci gier, nie musimy zajmowaæ się wszystkimi szczegóģami odpowiednio symulowanego ķrodowiska piģkarskiego. Naszym celem nie jest zwycięstwo w Pucharze Ķwiata, ale stworzenie agentów zdolnych do gry w piģkę noŋną wystarczająco dobrze, aby zapewniæ graczowi zabawne wyzwanie. Ta częķæ poprowadzi Cię przez tworzenie agentów gier, którzy mogą graæ w uproszczoną wersję piģki noŋnej - Simple Soccer - wykorzystując tylko umiejętnoķci, których nauczyģeķ się w tym tekķcie. Moim zamiarem nie jest zademonstrowanie, w jaki sposób naleŋy modelowaæ kaŋdą taktykę i umiejętnoķci, ale pokazanie, jak zaprojektowaæ i wdroŋyæ ķrodowisko sztucznej inteligencji w druŋynie sportowej, zdolne do wspierania wģasnych pomysģów. Mając to na uwadze, zachowaģem ķrodowisko gry i zasady Simple Soccer, cóŋ ... bardzo proste. Postanowiģem teŋ pominąæ pewne oczywiste taktyki. Częķciowo dlatego, ŋe zmniejszy zģoŋonoķæ sztucznej inteligencji, a tym samym uģatwi ci zrozumienie przepģywu logiki automatu stanów, ale gģównie dlatego, ŋe da ci moŋliwoķæ utrwalenia umiejętnoķci, których nauczyģeķ się w prawdziwym ŋyciu , w peģni rozwinięty projekt AI gry, jeķli zdecydujesz się wykonaæ æwiczenia na koņcu tej częķci. Do czasu ukoņczenia tego rozdziaģu będziesz w stanie tworzyæ agentów AI zdolnych do grania w większoķæ gier zespoģowych. Hokej na lodzie, rugby, krykiet, futbol amerykaņski, a nawet zdobycie flagi - będziesz w stanie kodowaæ zabawną sztuczną inteligencję.
Proste ķrodowisko i zasady gry w piģkę noŋną
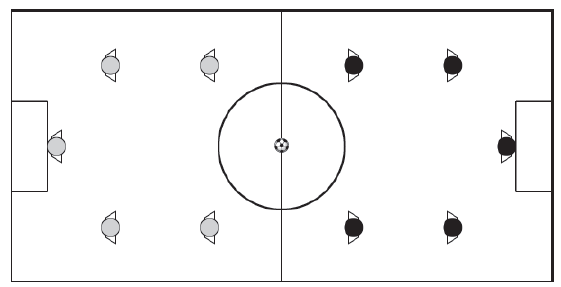
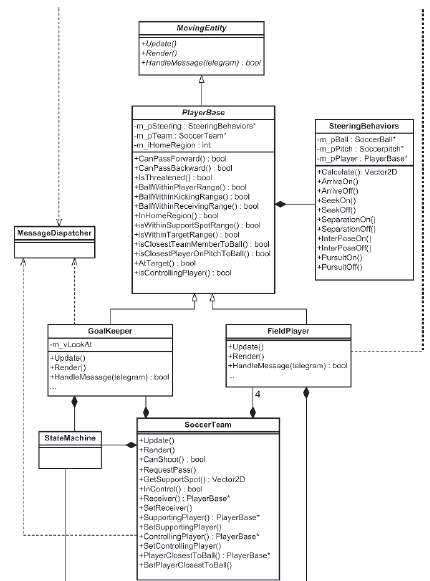
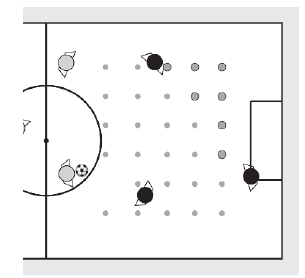
Zasady gry są nieskomplikowane. Istnieją dwie druŋyny: czerwona i niebieski. Kaŋda druŋyna skģada się z czterech graczy pola i jednego bramkarza. Celem gry jest zdobycie jak największej liczby bramek. Bramkę zdobywa się, kopiąc piģkę nad linią bramkową druŋyny przeciwnej. Boki obszaru gry Simple Soccer (zwanego "boiskiem") są otoczone (jak w hokeju), aby piģka nie mogģa wyjķæ poza pole gry, ale po prostu odbiģa się od ķcian. Oznacza to, ŋe w przeciwieņstwie do zwykģej piģki noŋnej, nie ma rzutów roŋnych ani rzutów z linii bocznej. Aha, i zdecydowanie nie ma reguģy spalonej! Rysunek pokazuje konfigurację na początku typowej gry.
Ķrodowisko gry skģada się z następujących elementów:
• Boisko do piģki noŋnej
• Dwie bramki
• Jedna piģka
• Dwa zespoģy
• Oķmiu graczy pola
• Dwóch bramkarzy
Kaŋdy typ elementu jest enkapsulowany jako obiekt. Moŋesz zobaczyæ, jak wszystkie są ze sobą powiązane, studiując uproszczony schemat klas UML pokazany na rysunku
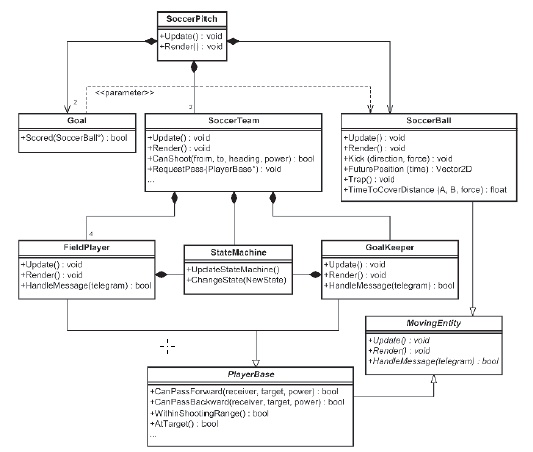
Obiekty gracza i bramkarza są podobne do agentów gry, z którymi spotkaģeķ się juŋ w tym tekķcie. Wkrótce opiszę je szczegóģowo, ale najpierw chcę pokazaæ, w jaki sposób wdraŋane są boisko, bramki i piģka noŋna. To powinno daæ ci poczucie ķrodowiska, w którym zajmują się agenci gry, a następnie mogę przejķæ do drobiazgowoķci samej AI.
Boisko do piģki noŋnej
Boisko do piģki noŋnej jest prostokątnym boiskiem otoczonym ķcianami. Na kaŋdym z krótkich kraņców boiska stoi centralnie bramka. Maģe kóģko na ķrodku pola gry jest okreķlane jako centralne miejsce. Piģka jest umieszczana w ķrodkowej pozycji przed rozpoczęciem meczu. Gdy bramka zostanie zdobyta, obie druŋyny rezygnują z kontroli nad piģką i zostaje ona ponownie ustawiona na ķrodku boiska, gotowa na kolejne "rozpoczęcie". Pole gry jest otoczone klasą SoccerPitch. Pojedyncze wystąpienie tej klasy jest tworzone w pliku main.cpp. Obiekt SoccerPitch jest wģaķcicielem instancji obiektów SoccerTeam, SoccerBall i Goal. Oto deklaracja klasy:
class SoccerPitch
{
public:
SoccerBall* m_pBall;
SoccerTeam* m_pRedTeam;
SoccerTeam* m_pBlueTeam;
Goal* m_pRedGoal;
Goal* m_pBlueGoal;
Te pierwsze skģadowe są oczywiste i opiszę odpowiednie klasy szczegóģowo wkrótce.
// pojemnik na ķciany graniczne
std :: vector
Granice boiska w ķrodowisku Simple Soccer są reprezentowane przez Wall2D. Ķciany są opisane segmentem linii z dwoma punktami koņcowymi i normalną do segmentu linii reprezentującego kierunek skierowany w stronę. Moŋesz je zapamiętaæ z opisu zachowania kierownicy unikającego ķciany.
// okreķla wymiary pola gry
Region * m_pPlayingArea;
Obiekt Region sģuŋy do opisu wymiarów boiska do piģki noŋnej. Region przechowuje lewą górną, prawą dolną i ķrodkową pozycję zadeklarowanego obszaru, a takŋe numer identyfikacyjny (ID).
std :: vector
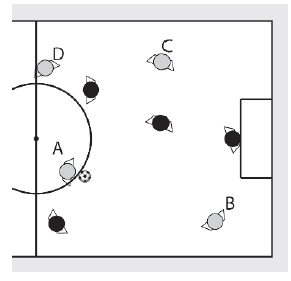
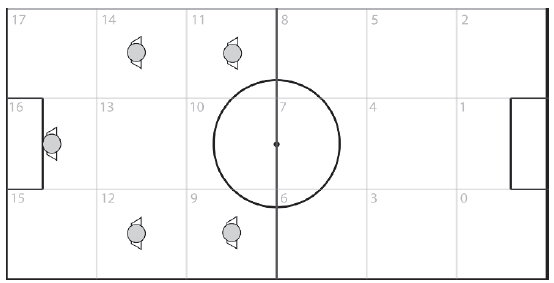
Piģkarze muszą wiedzieæ, gdzie są na boisku i chociaŋ ich wspóģrzędne x, y dają bardzo konkretną pozycję, warto równieŋ podzieliæ boisko na regiony, w których gracze mogą wykorzystaæ strategie. Aby to uģatwiæ, podziaģka jest podzielona na osiemnaķcie obszarów, jak pokazano na rysunku
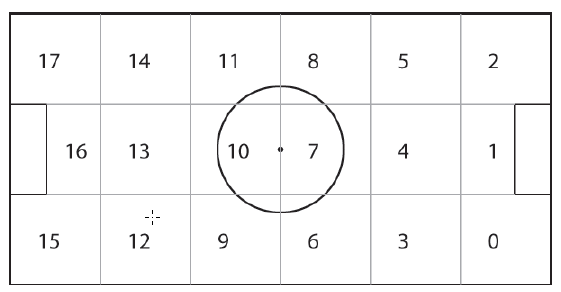
Na początku gry kaŋdemu graczowi przypisywany jest region macierzysty. To będzie region, do którego wraca po zdobyciu bramki lub zakoņczeniu gry piģką. Region macierzysty gracza moŋe się róŋniæ w trakcie gry, w zaleŋnoķci od strategii druŋyny. Na przykģad, gdy atakujesz, korzystne jest, aby druŋyna zajmowaģa pozycje na polu (w górę) bardziej niŋ podczas obrony.
bool m_bGameOn;
Zespoģy mogą zapytaæ o tę wartoķæ, aby sprawdziæ, czy gra jest w trakcie, czy nie. (Gra nie jest wģączona, jeķli bramka zostaģa wģaķnie zdobyta, a wszyscy gracze wracają na swoje pozycje początkowe.)
bool m_bGoalKeeperHasBall;
Ta wartoķæ jest ustawiona na true, jeķli bramkarz którejkolwiek druŋyny ma piģkę. Gracze mogą zapytaæ o tę wartoķæ, aby pomóc im wybraæ odpowiednie zachowanie. Na przykģad, jeķli bramkarz ma piģkę, znajdujący się w pobliŋu przeciwnik nie będzie próbowaģ jej kopnąæ.
/ * DODATKOWE SZCZEGÓĢY POMINIĘTE * /
public:
SoccerPitch(int cxClient, int cyClient);
~SoccerPitch();
void Update();
bool Render();
/* DODATKOWE SZCZEGÓĢY POMINIĘTE */
};
;
Funkcje SoccerPitch :: Update i SoccerPitch :: Render znajdują się na szczycie hierarchii aktualizacji i renderowania. Na kaŋdym etapie aktualizacji metody te są wywoģywane z gģównej pętli gry, a z kolei wywoģywane są odpowiednie metody renderowania i aktualizacji kaŋdej innej jednostki gry
Bramki
Bramkę na prawdziwym boisku piģkarskim okreķla lewy sģupek bramki i prawy sģupek bramki. Gol zostaje zdobyty, jeķli jakakolwiek częķæ piģki przekroczy linię bramkową - linię ģączącą sģupki bramki. Prostokątny obszar przed kaŋdą bramką jest rysowany kolorem odpowiedniej druŋyny, aby uģatwiæ odróŋnienie strony kaŋdej druŋyny. Linia bramkowa to linia opisująca tyģ tego pudeģka. Oto deklaracja klasy:
class Goal
{
private:
Vector2D m_vLeftPost;
Vector2D m_vRightPost;
//wektor reprezentujący kierunek do bramki
Vector2D m_vFacing;
//pozycja ķrodka linii bramkowej
Vector2D m_vCenter;
//za kaŋdym razem, gdy Scored() wykryje cel, jest on zwiększany
int m_iNumGoalsScored;
public:
Goal(Vector2D left, Vector2D right):m_vLeftPost(left),
m_vRightPost(right),
m_vCenter((left+right)/2.0),
m_iNumGoalsScored(0)
{
m_vFacing = Vec2DNormalize(right-left).Perp();
}
// Biorąc pod uwagę bieŋącą pozycję piģki i poprzednią pozycję piģki,
// ta metoda zwraca wartoķæ true, jeķli piģka przekroczy linię bramkową
// i przyrosty m_iNumGoalsScored
inline bool Scored (const SoccerBall * const ball);
/ * ZAPOMNIANE METODY AKCESORIA * /
};
Na kaŋdym kroku metoda punktowana celu kaŋdej druŋyny jest wywoģywana z poziomu SoccerPitch :: Aktualizacja. W przypadku wykrycia bramki gracze i piģka są resetowani do pozycji początkowych i są gotowi do rozpoczęcia.
Piģka
Piģka jest trochę bardziej interesująca. Dane i metody enkapsulacji piģki są zakodowane w klasie SoccerBall. Piģka się porusza, więc jej klasa dziedziczy po klasie MovingEntity, której uŋywaliķmy wczeķniej. Oprócz funkcji zapewnianej przez MovingEntity, SoccerBall ma równieŋ czģonków danych do rejestrowania ostatniej zaktualizowanej pozycji piģki oraz metod kopania piģki, testowania kolizji i obliczania przyszģej pozycji piģki. Kiedy prawdziwa piģka noŋna zostanie kopnięta, delikatnie zwalnia, aby odpocząæ z powodu tarcia o ziemię i dziaģającego na nią oporu powietrza. Proste piģki nie istnieją w prawdziwym ķwiecie, ale moŋemy modelowaæ podobny efekt, stosując staģe opóžnienie (przyspieszenie ujemne) do ruchu piģki. Wielkoķæ opóžnienia jest ustawiona w Params.ini jako wartoķæ Tarcie. Oto peģna deklaracja klasy SoccerBall wraz z opisem kilku waŋnych metod.
class SoccerBall : public MovingEntity
{
private:
//prowadzi rejestr pozycji piģki przy ostatniej aktualizacji
Vector2D m_vOldPos;
//wskažnik do zawodnika (lub bramkarza), który posiada piģkę
PlayerBase* m_pOwner;
// lokalne odniesienie do ķcian, które tworzą granicę boiska
// (uŋywane w wykrywaniu kolizji)
const std::vector
void TestCollisionWithWalls(const std::vector
Piģka sprawdza tylko kolizje z granicą boiska; nie testuje kolizji z zawodnikami, poniewaŋ piģka musi swobodnie poruszaæ się wokóģ i przez swoje "stopy" :
public:
SoccerBall(Vector2D pos,
double BallSize,
double mass,
std::vector
//skonfiguruj klasę podstawową
MovingEntity(pos,
BallSize,
Vector2D(0,0),
-1.0, //maksymalna prędkoķæ - nieuŋywane
Vector2D(0,1),
mass,
Vector2D(1.0,1.0), // skala - nieuŋywana
0, // wskažnik obrotu - nieuŋywany
0), // maksymalna siģa - nieuŋywana
m_PitchBoundary(PitchBoundary),
m_pOwner(NULL)
{}
// zaimplementuj klasę bazową Update
void Update(double time_elapsed);
// zaimplementuj klasę bazową Render
void Render();
// piģka noŋna nie musi obsģugiwaæ wiadomoķci
bool HandleMessage(const Telegram& msg){return false;}
// ta metoda przykģada siģę kierunkową do piģki (kopie ją!)
void Kick(Vector2D direction, double force);
// podana siģa kopnięcia i odlegģoķæ do obrotu okreķlona przez start
// i punkty koņcowe, ta metoda oblicza, jak dģugo zajmie
// piģce pokonanie odlegģoķci.
double TimeToCoverDistance(Vector2D from,
Vector2D to,
double force)const;
// ta metoda oblicza, gdzie będzie piģka w danym momencie
Vector2D FuturePosition(double time)const;
// sģuŋy to zawodnikom i bramkarzom do "puģapkowania" piģki - zatrzymania
// gra nie idzie. Zakģada się, ŋe gracz chwytający w puģapki jest w posiadaniu
// piģka i m_pOwner są odpowiednio dostosowane
void Trap(PlayerBase* owner){m_vVelocity.Zero(); m_pOwner = owner;}
Vector2D OldPos()const{return m_vOldPos;}
// umieszcza piģkę w poŋądanym miejscu i ustawia jej prędkoķæ na zero
void PlaceAtPosition(Vector2D NewPos);
};
Zanim przejdę do opisu klas zawodników i druŋyn, chciaģbym omówiæ kilka publicznych metod SoccerBall, aby upewniæ się, ŋe rozumiesz matematykę, którą one zawierają. Metody te są często stosowane przez graczy, aby przewidzieæ, gdzie będzie piģka w przyszģoķci lub przewidzieæ, ile czasu zajmie piģka, aby osiągnąæ pozycję. Projektując sztuczną inteligencję do gry sportowej / symulacji, będziesz często wykorzystywaæ swoje umiejętnoķci matematyczne i fizyczne. O tak! Więc jeķli nie znasz teorii, nadszedģ czas, aby przejķæ wróæ do częķci matematyczno-fizycznej i poczytaj o niej; inaczej będziesz bardziej zagubiony niŋ raper w lesie deszczowym.
Uwaga 3D: Mimo ŋe demo zostaģo zakodowane w 2D, w grze 3D zastosujesz dokģadnie takie same techniki. Jest trochę bardziej zģoŋona, poniewaŋ piģka odbije się i moŋe poruszaæ się ponad gģowami graczy, więc trzeba będzie dodaæ dodatkowe umiejętnoķci gracza, aby wykonywaæ strzaģy z chipem i "gģówkowaæ" piģkę, ale są to gģównie względy fizyczne. AI jest mniej więcej taki sam; wystarczy dodaæ kilka dodatkowych stanów do FSM i kilka dodatkowych logik do sprawdzania wysokoķci piģki podczas obliczania przechwyceņ i tym podobnych.
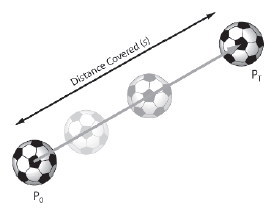
SoccerBall :: Future Position
Biorąc pod uwagę dģugoķæ czasu jako parametr, FuturePosition oblicza, gdzie piģka będzie w tym czasie w przyszģoķci - zakģadając, ŋe jej trajektoria będzie nieprzerwana. Nie zapominaj, ŋe piģka
doķwiadcza siģy tarcia o podģoŋe, co naleŋy wziąæ pod uwagę. Siģa tarcia jest wyraŋana jako staģe przyspieszenie dziaģające przeciwnie do kierunku ruchu kuli (inaczej zwalnianie). Staģa ta jest zdefiniowana w params.ini jako tarcie. Aby okreķliæ pozycję Pt kuli w czasie t, musimy obliczyæ, jak daleko ona się przemieszcza, uŋywając równania (1.87)
?x = u?t + 1/2 ?a?t2
gdzie a Δx to przebyta odlegģoķæ, u to prędkoķæ piģki po kopnięciu, a a to opóžnienie spowodowane tarciem.
Projektowanie AI
W druŋynie Simple Soccer występują dwa typy piģkarzy: zawodnicy pola i bramkarze. Oba te typy wywodzą się z tej samej klasy podstawowej, PlayerBase. Oba wykorzystują skróconą wersję klasy SteeringBehaviors, którą widzieliķcie w ostatnim rozdziale, i obie mają wģasne maszyny stanów skoņczonych, z wģasnym zestawem stanów
Nie wszystkie metody kaŋdej klasy są pokazane, ale daje dobre wyobraŋenie o projekcie. Większoķæ metod wymienionych dla PlayerBase i SoccerTeam obejmuje interfejs uŋywany przez automat stanu gracza do kierowania logiką AI. (Pominąģem parametry kaŋdej metody, aby pozwoliæ mi zmieķciæ się na schemacie na jednej stronie!) Zauwaŋ, ŋe SoccerTeam jest równieŋ wģaķcicielem StateMachine, dzięki czemu zespóģ moŋe zmieniæ swoje zachowanie w zaleŋnoķci od aktualnego stanu gry. Realizowanie
AI na poziomie druŋyny oprócz poziomu gracza tworzy tak zwaną AI warstwową. Ten rodzaj sztucznej inteligencji jest wykorzystywany we wszelkiego rodzaju grach komputerowych. W grach strategicznych czasu rzeczywistego (RTS) często znajdziesz wielopoziomową sztuczną inteligencję, w której wroga sztuczna inteligencja jest zwykle implementowana w kilku warstwach, powiedzmy, na poziomie jednostki, wojska i dowódcy. Zwróæ teŋ uwagę, jak gracze i ich druŋyny mają moŋliwoķæ wysyģania wiadomoķci. Wiadomoķci mogą byæ przekazywane od gracza do gracza (w tym bramkarzy) lub od druŋyny piģkarskiej do gracza. W tej wersji demo gracze nie przekazują wiadomoķci do swojej druŋyny. (Chociaŋ nie ma powodu, dla którego nie mogliby tego zrobiæ. Jeķli masz dobry powód, aby Twoi gracze wysyģali wiadomoķci do swojej druŋyny, zrób to.) zobaczycie póžniej w częķci. Poniewaŋ stan druŋyny gracza w pewnym stopniu decyduje o tym, jak powinien się on zachowywaæ, Twoja podróŋ do wnętrznoķci sztucznej inteligencji Simple Soccer prawdopodobnie najlepiej rozpocząæ od opisu klasy SoccerTeam. Po zrozumieniu, co sprawia, ŋe druŋyna tyka, przejdę do opisu, w jaki sposób zawodnicy i bramkarze wykorzystują swoją magię piģkarską.
Klasa SoccerTeam
Klasa SoccerTeam posiada instancje graczy, którzy tworzą druŋynę piģkarską. Ma wskažniki na boisko do piģki noŋnej, przeciwnej druŋyna, gģówny cel druŋyny i cel przeciwnika. Dodatkowo ma wskažniki dla "kluczowych" graczy na boisku. Poszczególni gracze mogą zapytaæ druŋynę piģkarską i wykorzystaæ te informacje w logice automatu stanowego. Przede wszystkim opiszę role tych kluczowych graczy, a następnie przejdę do omówienia róŋnych stanów wykorzystywanych przez zespóģ Simple Soccer. Oto, w jaki sposób wskažniki gģównego gracza są deklarowane w prototypie klasy:
class SoccerTeam
{
private:
/ * DODATKOWE SZCZEGÓĢY POMINIĘTE * /
// wskažniki do "kluczowych" graczy
PlayerBase* m_pReceivingPlayer;
PlayerBase* m_pPlayerClosestToBall;
PlayerBase* m_pControllingPlayer;
PlayerBase* m_pSupportingPlayer;
/* DODATKOWE SZCZEGÓĢY POMINIĘTE */
};
Gracz otrzymujący
Kiedy gracz kopie piģkę w kierunku innego gracza, gracz oczekujący na odbiór piģki, co nie jest zaskoczeniem, jest znany jako odbierający. W danym momencie przydzielony będzie tylko jeden odbiorca. Jeķli nie ma przydzielonego odbiorcya, ta wartoķæ jest ustawiona na NULL.
Gracz najbliŋszy piģce
Ten wskažnik wskazuje czģonka druŋyny, który jest obecnie najbliŋej piģki. Jak moŋesz sobie wyobraziæ, znajomoķæ tego rodzaju informacji jest przydatna, gdy gracz musi zdecydowaæ, czy powinien ķcigaæ piģkę, czy teŋ zostawiæ ją innemu czģonkowi zespoģu. Na kaŋdym kroku druŋyna piģkarska obliczy, który zawodnik jest najbliŋej i będzie stale aktualizowaæ ten wskažnik. Dlatego podczas gry m_pPlayerClosestToBall nigdy nie będzie miaģ wartoķci NULL.
Gracz kontrolujący
Gracz kontrolujący to gracz, który dowodzi piģką. Oczywistym przykģadem kontrolującego gracza jest ten, który ma zamiar podaæ koledze z druŋyny. Mniej oczywistym przykģadem jest gracz, który czeka na piģkę po podaniu. W tym ostatnim przykģadzie, chociaŋ piģka moŋe znajdowaæ się nigdzie w pobliŋu gracza odbierającego, mówi się, ŋe gracz ma kontrolę, poniewaŋ, o ile nie zostanie przechwycony przez przeciwnika, odbiorca będzie następnym graczem, który moŋe kopnąæ piģkę. Gracz kontrolujący, poruszając się w górę w kierunku celu przeciwnika, jest często okreķlany jako gracz atakujący lub, mówiąc proķciej, jako atakujący. Jeķli druŋyna nie kontroluje piģki, wskažnik ten zostanie ustawiony na NULL.
Gracz wspierający
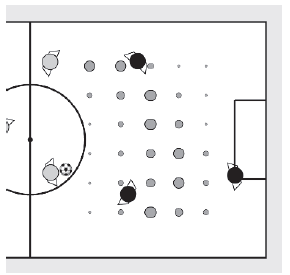
Gdy gracz przejmie kontrolę nad piģką, druŋyna wyznaczy zawodnika wspierającego. Gracz wspierający będzie próbowaģ przesunąæ się na uŋyteczną pozycję dalej w górę pola od atakującego. Pozycje wspierające są oceniane na podstawie pewnych cech, takich jak ģatwoķæ podania napastnikowi przez piģkę do pozycji oraz prawdopodobieņstwo zdobycia bramki z pozycji. Na przykģad pozycja B na poniŋszym rysunku byģaby uwaŋana za dobrą pozycję pomocniczą (dobry widok na bramkę przeciwnika, ģatwą do podania), pozycję C tak bardzo taką pozycję wspierającą (uczciwy widok na bramkę przeciwnika, sģaby potencjaģ podania), a pozycja D bardzo sģaba pozycja podparcia (maģy potencjaģ podania, brak strzaģu w bramkę, nie w górę ofensywy). Jeķli nie ma przydzielonego gracza wspierającego, ten wskažnik wskaŋe NULL.
Pozycje wspierające są obliczane przez próbkowanie serii miejsc na boisku i przeprowadzanie na nich kilku testów, co daje ģączny wynik. Pozycja z najwyŋszym wynikiem jest uwaŋana za najlepsze miejsce wspierające lub BSS, jak to czasami nazywam. Osiąga się to za pomocą klasy o nazwie SupportSpotCalculator. Myķlę, ŋe teraz moŋe byæ dobry moment, aby przejķæ do maģej, ale waŋnej stycznej, aby pokazaæ, jak dziaģa ta klasa.
Obliczanie najlepszego miejsca wsparcia
Klasa SupportSpotCalculator oblicza BSS, oceniając liczbę pozycji punktowych próbkowanych z poģowy boiska przeciwnika. Domyķlne lokalizacje miejsc (dla druŋyny czerwonej) pokazano na rysunku
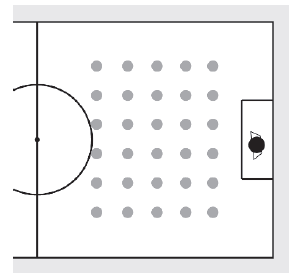
Jak widaæ, wszystkie miejsca znajdują się na poģowie boiska przeciwnika. Nie ma potrzeby próbkowania pozycji dalej w dóģ pola, poniewaŋ wspierający gracz zawsze będzie staraģ się znaležæ miejsce, które daje najlepszą szansę na oddanie strzaģu, i które nieuchronnie będzie znajdowaæ się blisko bramki przeciwnika. Miejsce wsparcia ma pozycję i wynik, takie jak:
struct SupportSpot
{
Vector2D m_vPos;
double m_dScore;
SupportSpot(Vector2D pos, double val):m_vPos(pos),
m_dScore(value)
{}
};
Punkty są punktowane poprzez badanie kaŋdego z nich kolejno i ocenianie ich pod kątem okreķlonej jakoķci, na przykģad tego, czy cel jest moŋliwy z pozycji miejsca lub jak daleko od kontrolującego gracza znajduje się miejsce. Wyniki dla kaŋdej jakoķci są kumulowane, a miejsce o najwyŋszym wyniku jest oznaczane jako najlepsze miejsce wspierające. Gracz wspierający moŋe następnie zbliŋyæ się do pozycji BSS, przygotowując się do podania od atakującego.
UWAGA Nie jest konieczne obliczanie BSS na kaŋdym etapie aktualizacji; dlatego liczba wykonywanych obliczeņ jest regulowana do czasów Support-SpotUpdateFreq razy na sekundę. Wartoķæ domyķlna ustawiona w params.ini wynosi raz na sekundę.
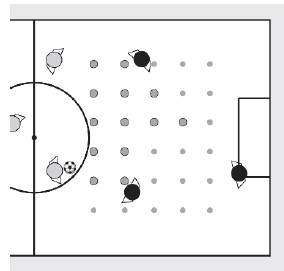
Aby dokģadnie okreķliæ, jakie powinny byæ te cechy, musisz myķleæ jak piģkarz. Jeķli biegģbyķ po boisku do piģki noŋnej, próbując postawiæ się na korzystnej pozycji wspierającej, jakie czynniki byķ wziąģ pod uwagę? Prawdopodobnie cenisz pozycje, w których koledzy z druŋyny mogliby podaæ piģkę. Na swojej mentalnej mapie boiska piģkarskiego wyobraŋasz sobie siebie w kaŋdym miejscu i bierzesz pod uwagę te pozycje, w których wedģug ciebie atakujący mógģby bezpiecznie podaæ piģkę jako dobre pozycje, w których moŋesz się ustawiæ. SupportSpotCalculator robi to samo, przyznając kaŋdemu spotowi speģniającemu ten warunek wynik równowaŋny wartoķci: Spot_CanPassScore (ustawiony jako 2.0 w params.ini). Poniŋszy rysunek pokazuje typową pozycję podczas gry, podkreķlając wszystkie miejsca, które zostaģy ocenione pod kątem potencjaģu do podania.
Ponadto godne są pozycje, z których moŋna strzeliæ gola
Uwaga. Dlatego SupportSpotCalculator przypisuje wynik Spot_CanScoreFromPositionScore do kaŋdego miejsca, które przejdzie test strzaģu jest moŋliwe. Nie jestem ekspertem od piģki noŋnej (daleki od tego!), Ale uwaŋam, ŋe umiejętnoķæ podania do miejsca powinna byæ oceniana wyŋej niŋ umiejętnoķæ oddania strzaģu z miejsca - w koņcu atakujący musi podaæ piģkę do zawodnika wspierającego, zanim będzie moŋna wykonaæ próbę bramkową. Mając to na uwadze, domyķlną wartoķcią dla Spot_CanScoreFromPositionScore jest 1,0. Poniŋej pokazuje tę samą pozycję jak rycina powyŋej z punktami ocenianymi pod kątem potencjaģu strzaģu.
Innym aspektem, który moŋe rozwaŋyæ gracz wspierający, jest celowanie na pozycję w pewnej odlegģoķci od kolegi z druŋyny. Nie za daleko, aby przyjęcie nie byģo trudne i ryzykowne, i nie za blisko, aby przyjęcie nie zostaģo zmarnotrawione. Uŋyģem wartoķci 200 pikseli jako optymalnej odlegģoķci, w jakiej gracz wspierający powinien znajdowaæ się z dala od gracza kontrolującego. W tej odlegģoķci spot otrzyma optymalny wynik Spot_DistFromControllingPlayerScore (domyķlnie 2.0), a wyniki będą się zmniejszaæ dla odlegģoķci bliŋszych lub dalszych
Po zbadaniu kaŋdej pozycji i zsumowaniu wszystkich wyników, miejsce o najwyŋszym wyniku jest uwaŋane za najlepsze miejsce wspierające, a atakujący wspierający przesunie się, aby zająæ tę pozycję w gotowoķci do otrzymania podania. Ta procedura okreķlania BSS jest przeprowadzana w metodzie SupportSpotCalculator :: DetermineBestSupportingPosition. Oto kod žródģowy do sprawdzenia:
Vector2D SupportSpotCalculator::DetermineBestSupportingPosition()
{
//aktualizuj spoty tylko co kilka klatek
if (!m_pRegulator->AllowCodeFlow()&& m_pBestSupportingSpot)
{
return m_pBestSupportingSpot->m_vPos;
}
//zresetuj najlepsze miejsce wspierające
m_pBestSupportingSpot = NULL;
double BestScoreSoFar = 0.0;
std::vector
for (curSpot = m_Spots.begin(); curSpot != m_Spots.end(); ++curSpot)
{
// najpierw usuņ poprzedni wynik. (wynik jest ustawiony na jeden, aby
// widz mógģ zobaczyæ pozycje wszystkich miejsc, jeķli ma
// pomoce wģączone)
curSpot->m_dScore = 1.0;
// Test 1. czy moŋliwe jest bezpieczne podanie z pozycji piģki
// do tej pozycji?
if(m_pTeam->isPassSafeFromAllOpponents(m_pTeam->ControllingPlayer()->Pos(),
curSpot->m_vPos,
NULL,
Prm.MaxPassingForce))
{
curSpot->m_dScore += Prm.Spot_PassSafeStrength;
}
// Test 2. Ustal, czy moŋna strzeliæ gola z tej pozycji.
if( m_pTeam->CanShoot(curSpot->m_vPos,
Prm.MaxShootingForce))
{
curSpot->m_dScore += Prm.Spot_CanScoreStrength;
}
// Test 3. obliczyæ, jak daleko to miejsce jest od kontroli
//gracz. Im dalej, tym wyŋszy wynik. Wszelkie odlegģoķci dalej
// poza pikselami OptimalDistance nie otrzymuje się wyniku.
if (m_pTeam->SupportingPlayer())
{
const double OptimalDistance = 200.0;
double dist = Vec2DDistance(m_pTeam->ControllingPlayer()->Pos(),
curSpot->m_vPos);
double temp = fabs(OptimalDistance - dist);
if (temp < OptimalDistance)
{
// znormalizuj odlegģoķæ i dodaj ją do wyniku
curSpot->m_dScore += Prm.Spot_DistFromControllingPlayerStrength *
(OptimalDistance-temp)/OptimalDistance;
}
}
//sprawdž, czy to miejsce ma jak dotąd najwyŋszy wynik
if (curSpot->m_dScore > BestScoreSoFar)
{
BestScoreSoFar = curSpot->m_dScore;
m_pBestSupportingSpot = &(*curSpot);
}
}
return m_pBestSupportingSpot->m_vPos;
Cóŋ, myķlę, ŋe "maģa styczna" do omawiania tematu miejsc wsparcia zmieniģa się w doķæ duŋą! Zanim się rozproszyģem, mówiģem ci, jak klasa SoccerTeam zrobiģa to, pamiętasz? Jak juŋ wspomniaģem, SoccerTeam jest wģaķcicielem automatu stanu. Dzięki temu moŋe zmieniaæ swoje zachowanie w zaleŋnoķci od tego, w jakim jest stanie. Przyjrzyjmy się teraz dostępnym stanom druŋyny i ich wpģywowi na zachowanie jej graczy.
SoccerTeam States
W dowolnym momencie druŋyna piģkarska moŋe znajdowaæ się w jednym z trzech stanów:
Obrona, atak lub przygotowanie ForKickOff. Utrzymaģem logikę tych stanów w bardzo prosty sposób - moim zamiarem jest pokazanie, jak zaimplementowaæ wielopoziomową sztuczną inteligencję, a nie zademonstrowanie, jak tworzyæ zģoŋone taktyki piģkarskie - chociaŋ moŋna je ģatwo dodawaæ i modyfikowaæ, aby tworzyæ praktycznie dowolny typ zachowania zespoģu, które moŋesz sobie wyobraziæ. Jak wspomniaģem wczeķniej, gracze wykorzystują ideę "regionów", aby pomóc w pozycjonowaniu ich samych poprawnie na boisku. Stany druŋyny uŋywają tych regionów do kontrolowania, gdzie gracze powinni się poruszaæ, jeķli nie są w posiadaniu piģki lub nie wspierają / atakują. Na przykģad w obronie rozsądne jest, aby druŋyna piģkarska zbliŋaģa swoich zawodników bliŋej bramki gospodarzy, a podczas ataku gracze powinni poruszaæ się dalej w górę, bliŋej bramki przeciwnika. Oto szczegóģowe opisy kaŋdego stanu zespoģu.
PrepareForKickOff
Druŋyna wchodzi w ten stan natychmiast po zdobyciu bramki. Metoda Enter ustawia wszystkie kluczowe wskažniki dla graczy na NULL, zmienia ich rodzinne regiony z powrotem na pozycje początkowe i wysyģa kaŋdemu graczowi wiadomoķæ z proķbą o powrót do swoich macierzystych regionów. W rzeczywistoķci coķ takiego:
void PrepareForKickOff::Enter(SoccerTeam* team)
{
//reset key player pointers
team->SetControllingPlayer(NULL);
team->SetSupportingPlayer(NULL);
team->SetReceiver(NULL);
team->SetPlayerClosestToBall(NULL);
//send Msg_GoHome to each player.
team->ReturnAllFieldPlayersToHome();
}
W kaŋdym cyklu Wykonania druŋyna czeka, aŋ wszyscy gracze z obu druŋyn znajdą się w swoich regionach macierzystych, w którym to momencie zmienia stan na Obrona i mecz rozpoczyna się ponownie.
void PrepareForKickOff::Execute(SoccerTeam* team)
{
//jeķli obie druŋyny są na pozycji, rozpocznij grę
if (team->AllPlayersAtHome() && team->Opponents()->AllPlayersAtHome())
{
team->ChangeState(team, Defending::Instance());
}
W obronie
Metoda Enter stanu broniącego druŋyny piģkarskiej zmienia pozycje domowe wszystkich czģonków druŋyny, którzy będą znajdowaæ się na poģowie boiska druŋyny. Zbliŋanie wszystkich graczy do bramki gospodarza w ten sposób utrudnia druŋynie przeciwnej manewrowanie piģką i zdobycie bramki. Poniŋszy rysunek pokazuje pozycje gospodarzy dla czerwonej druŋyny, gdy są w stanie Obrony.
void Defending::Enter(SoccerTeam* team)
{
//okreķlają regiony macierzyste dla tego stanu kaŋdego z graczy
const int BlueRegions[TeamSize] = {1,6,8,3,5};
const int RedRegions[TeamSize] = {16,9,11,12,14};
//skonfiguruj rodzinne regiony gracza
if (team->Color() == SoccerTeam::blue)
{
ChangePlayerHomeRegions(team, BlueRegions);
}
else
{
ChangePlayerHomeRegions(team, RedRegions);
}
// jeķli gracz jest w stanie Wait lub ReturnToHomeRegion, jego
// cel sterowania musi zostaæ zaktualizowany do nowego regionu macierzystego
team->UpdateTargetsOfWaitingPlayers();
}
Metoda Execution w stanie Broniąca nieustannie sprawdza zespóģ, czy ma kontrolę nad piģką. Gdy tylko druŋyna przejmie kontrolę, zmienia stan na Atak.
void Defending::Execute(SoccerTeam* team)
{
//jeķli w stanie zmiany kontroli
if (team->InControl())
{
team->ChangeState(team, Attacking::Instance()); return;
}
}
Atakowanie
Poniewaŋ metoda Enter stanu Atakowania wygląda identycznie jak w przypadku stanu Obrona, nie będę marnowaæ miejsca i nie wymienię go tutaj. Jedyna róŋnica polega na tym, ŋe graczom przypisuje się róŋne regiony rodzinne. Regiony przypisane graczom druŋyny czerwonej podczas Ataku pokazano na rysunku
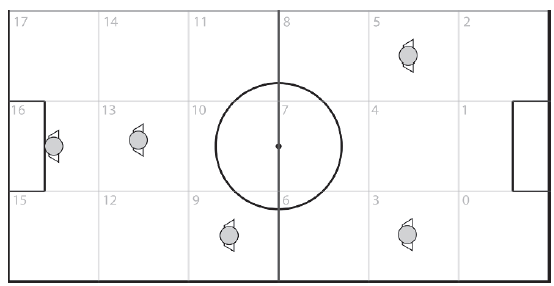
Jak widaæ, gracze ustawiają się znacznie bliŋej celu przeciwnika. Daje im to większą szansę na utrzymanie piģki na poģowie boiska przeciwnika, a tym samym większą szansę na zdobycie bramki. Zauwaŋ, jak jeden gracz jest trzymany z tyģu, ustawiony tuŋ przed bramkarzem, aby zapewniæ odrobinę obrony, jeķli przeciwnik uwolni się z piģką i wybiegnie do bramki druŋyny. Metoda wykonania stanu Ataku jest równieŋ podobna do metody Obrony z jednym dodatkiem. Gdy druŋyna przejmie kontrolę nad piģką, druŋyna natychmiast iteruje wszystkich graczy, aby ustaliæ, który zapewni najlepsze wsparcie dla atakującego. Po przydzieleniu gracza wsparcia, wesoģo ruszy w kierunku najlepszego miejsca wsparcia, zgodnie z procesem, który omówiliķmy wczeķniej.
void Attacking::Execute(SoccerTeam* team)
{
// jeķli ten zespóģ nie jest juŋ w stanie zmiany kontroli
if (!team->InControl())
{
team->ChangeState(team, Defending::Instance()); return;
}
// obliczyæ najlepszą pozycję dla dowolnego atakującego pomocnika, na który się przeniesie
team->DetermineBestSupportingPosition();
}
Na razie wystarczy o klasie SoccerTeam. Rzuæmy okiem na sposób implementacji graczy.
Gracze pola
Gracze na boisku to faceci, którzy biegają po boisku, podają piģkę i strzelają do bramki przeciwnika. Istnieją dwa rodzaje graczy terenowych: atakujący i obroņcy. Oba są tworzone jako obiekty tej samej klasy, FieldPlayer, ale wyliczona zmienna skģadowa jest ustawiona w celu okreķlenia ich roli. Obroņcy pozostają gģównie z tyģu pola, chroniąc bramkę gospodarzy, a atakujący mają więcej swobody w poruszaniu się w górę pola, w kierunku bramki przeciwnika.
Ruch gracza pola
Zawodnik na boisku ma kurs wyrównany do prędkoķci i wykorzystuje zachowania kierownicze do przemieszczania się na pozycję i gonienia piģki. Gdy gracz nieruchomy obraca się w kierunku piģki,nie robi tego, aby postrzegaæ piģkę, poniewaŋ zawsze wie, gdzie jest piģka (od bezpoķredniego zapytania do ķwiata gry), ale poniewaŋ ma większą szansę na podanie natychmiast po przechwyceniu i poniewaŋ wygląda lepiej dla naszych ludzkich oczu . Pamiętaj, ŋe chodzi o stworzenie iluzji inteligencji, a nie twardej sztucznej inteligencji, jak badają naukowcy. Większoķæ ludzi zakģada, ŋe jeķli komputer ķledzi piģkę gģową, to musi ona "obserwowaæ" piģkę. Tworząc graczy, którzy zawsze ķledzą piģkę, zapewniamy równieŋ, ŋe nic dziwnego się nie wydarzy - na przykģad gracz odbierający i kontrolujący piģkę, gdy jest ona zwrócona w przeciwnym kierunku. Takie rzeczy przeģamaģyby iluzję, pozostawiając gracza czującego się oszukanym i niezadowolonym. Jestem pewien, ŋe sam doķwiadczyģeķ tego uczucia podczas grania w gry. Wystarczy niewielkie, podejrzanie wyglądające zdarzenie, aby zniszczyæ zaufanie gracza do sztucznej inteligencji. Zawodnicy na boisku poruszają się po boisku, wykorzystując przylot i szukają zachowaņ, aby kierowaæ się w kierunku celu zachowania kierowania lub ķcigają, aby ķcigaæ przewidywaną pozycję piģki w przyszģoķci. Kaŋde wymagane zachowanie kierowania jest zwykle wģączane w metodzie Enter stanu i metodzie Exit, co pozwala mi miģo omawiaæ stany, które moŋe zająæ gracz terenowy.
Stany graczy pola
W prawdziwym ŋyciu piģkarze muszą nauczyæ się zestawu umiejętnoķci, aby kontrolowaæ piģkę wystarczająco dobrze, aby koordynowaæ grę zespoģową i strzelaæ bramki. Robią to przez niekoņczące się godziny æwiczeņ i powtarzania tych samych ruchów. Sami piģkarze nie muszą æwiczyæ, ale polegają na tobie, programiķcie, aby wyposaŋyæ ich w umiejętnoķci, których potrzebują, aby dobrze graæ. Skoņczona maszyna stanu gracza terenowego wykorzystuje osiem stanów:
• GlobalPlayerState
• Wait
• ReceiveBall
• KickBall
• Drybling
• ChaseBall
• ReturnToHomeRegion
• SupportAttacker
Zmiany stanu są dokonywane albo w logice samego stanu, albo gdy gracz otrzymuje wiadomoķæ od innego gracza (na przykģad w celu otrzymania piģki).
GlobalPlayerState
Gģównym celem globalnego stanu gracza pola jest przesģanie routera. Chociaŋ większoķæ zachowaņ gracza jest realizowana przez logikę zawartą w kaŋdym z jego stanów, poŋądane jest równieŋ wdroŋenie pewnej formy wspóģpracy gracza za poķrednictwem systemu komunikacji. Dobrym przykģadem tego jest sytuacja, gdy gracz wspierający znajduje się na korzystnej pozycji i prosi kolegę z druŋyny o podanie. Aby uģatwiæ graczom komunikację, zaimplementowano sprawdzony system przesyģania wiadomoķci, o którym dowiedziaģeķ się w częķci mat-fiz. W Simple Soccer jest pięæ wiadomoķci. Oni są:
• Msg_SupportAttacker
• Msg_GoHome
• Msg_ReceiveBall
• Msg_PassToMe
• Msg_Wait
Wiadomoķci są wyliczone w pliku SoccerMessages.h. Rzuæmy okiem na sposób przetwarzania kaŋdego z nich.
bool GlobalPlayerState::OnMessage(FieldPlayer* player, const Telegram& telegram)
{
switch(telegram.Msg)
{
case Msg_ReceiveBall:
{
//ustaw cel
player->Steering()->SetTarget(*(Vector2D*)(telegram.ExtraInfo));
//zmiana stanu
player->ChangeState(player, ReceiveBall::Instance());
return true;
}
break;
Msg_ReceiveBall jest wysyģany do gracza odbierającego po podaniu przekazania. Pozycja celu podania jest zapisywana jako cel zachowania kierowania odbiorcy. Gracz odbierający potwierdza komunikat, zmieniając stan na ReceiveBall.
case Msg_SupportAttacker:
{
//jeķli juŋ obsģuguje, po prostu wróæ
if (player->CurrentState() == SupportAttacker::Instance()) return true;
//ustaw cel jako najlepszą pozycję wspierającą
player->Steering()->SetTarget(player->Team()->GetSupportSpot());
//zmieņ stan
player->ChangeState(player, SupportAttacker::Instance());
return true;
}
break;
Msg_SupportAttacker jest wysyģany przez gracza kontrolującego z proķbą o wsparcie podczas próby przesunięcia piģki dalej w górę pola. Gdy gracz otrzyma tę wiadomoķæ, ustawia swój cel sterowania na najlepsze miejsce wspierające, a następnie zmienia stan na SupportAttacker.
case Msg_GoHome:
{
player->SetDefaultHomeRegion();
player->ChangeState(player, ReturnToHomeRegion::Instance());
return true;
}
break;
Gdy gracz otrzyma tę wiadomoķæ, wraca do swojego rodzinnego regionu. Jest często transmitowany przez bramkarzy przed kopnięciem bramki i przez "boisko", aby przenieķæ zawodników z powrotem na ich pozycje początkowe między bramkami.
case Msg_Wait:
{
//zmieņ stan
player->ChangeState(player, Wait::Instance());
return true;
}
break;
Msg_Wait instruuje gracza, aby poczekaģ na bieŋącej pozycji.
case Msg_PassToMe:
{
//uzyskaj pozycję gracza ŋądającego podania
FieldPlayer* receiver = (FieldPlayer*)(telegram.ExtraInfo);
// jeķli piģka nie znajduje się w zasięgu kopnięcia lub zawodnik jej nie ma
// okno, w którym moŋe wykonaæ kopnięcie, ten gracz nie moŋe spasowaæ
// piģkę do gracza zgģaszającego ŋądanie.
if (!player->BallWithinKickingRange())
{
return true;
}
//dokonaj podania
player->Ball()->Kick(receiver->Pos() - player->Ball()->Pos(),
Prm.MaxPassingForce);
//powiadom odbiorcę, ŋe nadchodzi przepustka
Dispatch->DispatchMsg(SEND_MSG_IMMEDIATELY,
player->ID(),
receiver->ID(),
Msg_ReceiveBall,
NO_SCOPE,
&receiver->Pos());
//zmieņ stan
player->ChangeState(player, Wait::Instance());
player->FindSupport();
return true;
}
break;
Msg_PassToMe jest uŋywany w kilku sytuacjach, gģównie gdy zawodnik wspierający przesunąģ się na pozycję i uwaŋa, ŋe ma duŋe szanse na zdobycie bramki. Gdy gracz otrzyma tę wiadomoķæ, podaje piģkę do gracza proszącego (jeķli podanie moŋe byæ wykonane bezpiecznie).
}//end switch
return false;
}
Oprócz OnMessage stan globalny implementuje równieŋ metodę Execute. Obniŋa to maksymalną prędkoķæ zawodnika, jeķli znajduje się on blisko piģki, aby symulowaæ sposób, w jaki piģkarze poruszają się wolniej, gdy są w posiadaniu piģki.
void GlobalPlayerState::Execute(FieldPlayer* player)
{
//jeķli gracz jest w posiadaniu i znajduje się blisko piģki, zmniejsz jego maksymalną prędkoķæ
if((player->BallWithinReceivingRange()) &&
(player->Team()->ControllingPlayer() == player))
{
player->SetMaxSpeed(Prm.PlayerMaxSpeedWithBall);
}
else
{
player->SetMaxSpeed(Prm.PlayerMaxSpeedWithoutBall);
}
}
ChaseBall
Gdy zawodnik jest w stanie ChaseBall, będzie szukaģ aktualnej pozycji piģki, próbując dostaæ się w zasięgu kopnięcia. Gdy gracz wejdzie w ten stan, jego zachowanie wyszukiwania jest aktywowane w następujący sposób:
void ChaseBall::Enter(FieldPlayer* player)
{
player->Steering()->SeekOn();
}
Podczas aktualizacji metody Wykonaj gracz zmieni stan na KickBall, jeķli piģka znajdzie się w zasięgu kopnięcia. Jeķli piģka nie znajduje się w zasięgu, zawodnik będzie ją goniģ, dopóki zawodnik pozostanie najbliŋszym czģonkiem druŋyny.
void ChaseBall::Execute(FieldPlayer* player)
{
//jeķli piģka znajduje się w zasięgu kopnięcia, gracz zmienia stan na KickBall.
if (player->BallWithinKickingRange())
{
player->ChangeState(player, KickBall::Instance());
return;
}
// jeķli gracz jest najbliŋej piģki, powinien zachowaæ
// gonię to
if (player->isClosestTeamMemberToBall())
{
player->Steering()->SetTarget(player->Ball()->Pos());
return;
}
/// jeķli gracz nie jest juŋ najbliŋej piģki, powinien wróciæ
// do swojego rodzinnego regionu i poczekaj na kolejną okazję
player->ChangeState(player, ReturnToHomeRegion::Instance());
}
Kiedy gracz wyjdzie z tego stanu, zachowanie poszukiwania jest dezaktywowane
void ChaseBall::Exit(FieldPlayer* player)
{
player->Steering()->SeekOff();
}
Oczekiwanie
W stanie oczekiwania gracz pozostanie pozycjonowany w miejscu okreķlonym przez cel zachowania kierownicy. Jeķli gracz zostanie wypchnięty z pozycji przez innego gracza, wróci na pozycję. Istnieje kilka warunków wyjķcia dla tego stanu"
• Jeķli oczekujący gracz znajdzie się na polu walki z kolegą z druŋyny, który kontroluje piģkę, wyķle do niego wiadomoķæ z proķbą o podanie piģki. Wynika to z faktu, ŋe poŋądane jest, aby piģkę dostaæ się jak najdalej w górę i jak najszybciej. Jeķli jest to bezpieczne, czģonek druŋyny wykona podanie, a zawodnik oczekujący zmieni stan na odbiór piģki.
• Jeķli piģka zbliŋy się do oczekującego gracza niŋ jakikolwiek inny czģonek druŋyny i nie ma przydzielonego gracza odbierającego, zmieni stan na ChaseBall.
void Wait::Execute(FieldPlayer* player)
{
//jeķli gracz zostaģ wyrzucony z pozycji, wróæ na pozycję
if (!player->AtTarget())
{
player->Steering()->ArriveOn();
return;
}
else
{
player->Steering()->ArriveOff();
player->SetVelocity(Vector2D(0,0));
//gracz powinien patrzeæ na piģkę!
player->TrackBall();
}
// jeķli druŋyna tego gracza kontroluje ORAZ ten gracz nie jest atakującym
// AND jest dalej w polu niŋ atakujący, który powinien poprosiæ o podanie
if ( player->Team()->InControl() &&
(!player->isControllingPlayer()) &&
player->isAheadOfAttacker() )
{
player->Team()->RequestPass(player);
return;
}
if (player->Pitch()->GameOn())
{
// jeķli piģka jest bliŋej tego zawodnika niŋ jakikolwiek inny czģonek zespoģu ORAZ
// nie ma przypisanego odbiornika ORAZ ŋaden bramkarz nie ma
// piģka, idž za nią
if (player->isClosestTeamMemberToBall() &&
player->Team()->Receiver() == NULL &&
!player->Pitch()->GoalKeeperHasBall())
{
player->ChangeState(player, ChaseBall::Instance());
return;
}
}
}
ReceiveBall
Gracz przechodzi w stan ReceiveBall podczas przetwarzania komunikatu Msg_ReceiveBall. Ta wiadomoķæ jest wysyģana do gracza odbierającego przez gracza, który wģaķnie wykonaģ podanie. Pole ExtraInfo w telegramie zawiera pozycję docelową piģki, dzięki czemu moŋna odpowiednio ustawiæ cel sterujący gracza odbierającego, pozwalając odbiorcy przesunąæ się na pozycję, gotowy do przechwycenia piģki. Zawsze moŋe byæ tylko jeden gracz z kaŋdej druŋyny w stanie ReceiveBall - nie byģoby dobrą taktyką, aby dwóch lub więcej graczy próbowaģo przechwyciæ tę samą przepustkę, więc pierwszą rzeczą, jaką robi metoda Enter tego stanu, jest zaktualizowanie odpowiedniego Wskažniki SoccerTeam, aby umoŋliwiæ innym czģonkom zespoģu ich zapytanie w razie potrzeby. Aby stworzyæ bardziej interesującą i naturalnie wyglądającą grę, istnieją dwie metody otrzymania piģki. Jedna metoda wykorzystuje zachowanie przylotu do kierowania w kierunku docelowej pozycji piģki; drugi wykorzystuje zachowanie poķcigowe do ķcigania piģki. Gracz wybiera między nimi w zaleŋnoķci od wartoķci ChanceOfUsingArriveTypeReceiveBehavior, niezaleŋnie od tego, czy przeciwnik znajduje się w promieniu zagroŋenia, i czy odbiornik znajduje się na trzeciej pozycji boiska najbliŋej celu przeciwnika (nazywam ten obszar "gorącym" region").
void ReceiveBall::Enter(FieldPlayer* player)
{
//powiadom druŋynę, ŋe ten gracz otrzymuje piģkę
player->Team()->SetReceiver(player);
//ten gracz jest teraz takŋe graczem kontrolującym
player->Team()->SetControllingPlayer(player);
// istnieją dwa typy zachowania odbiorczego. Jedno uŋycie przyjeŋdŋa do kierowania
// odbiornik do pozycji wysģanej przez przechodnia w jego telegramie
// inne uŋywa zachowania poķcigowego do ķcigania piģki.
// Ta instrukcja wybiera między nimi w zaleŋnoķci od prawdopodobieņstwa
// ChanceOfUsingArriveTypeReceiveBehavior, niezaleŋnie od tego, czy jest przeciwny
// gracz jest blisko gracza odbierającego i tego, czy odbiera
// gracz znajduje się w "gorącym regionie" przeciwnika (trzeci na boisku najbliŋszym
// do bramki przeciwnika)
const double PassThreatRadius = 70.0;
if ((player->InHotRegion() ||
RandFloat() < Prm.ChanceOfUsingArriveTypeReceiveBehavior) &&
!player->Team()->isOpponentWithinRadius(player->Pos(), PassThreatRadius))
{
player->Steering()->ArriveOn();
}
else
{
player->Steering()->PursuitOn();
}
}
Metoda wykonania jest prosta. Zawodnik odbierający przesunie się na pozycję i pozostanie tam, chyba ŋe piģka dotrze na okreķloną odlegģoķæ lub jeķli jego druŋyna straci kontrolę nad piģką, w którym to momencie gracz przejdzie do stanu ChaseBall.
void ReceiveBall::Execute(FieldPlayer* player)
{
// jeķli piģka zbliŋy się wystarczająco do gracza lub jego druŋyna straci kontrolę
// powinien zmieniæ stan, aby goniæ piģkę
if (player->BallWithinReceivingRange() || !player->Team()->InControl())
{
player->ChangeState(player, ChaseBall::Instance());
return;
}
// cel gracza musi byæ stale aktualizowany o pozycję piģki
// jeķli do podąŋania za piģką zastosowano zachowanie kierowania poķcigowego.
if (player->Steering()->PursuitIsOn())
{
player->Steering()->SetTarget(player->Ball()->Pos());
}
// jeķli gracz "dotarģ" do celu sterowania, powinien poczekaæ i
// odwróæ się twarzą do piģki
if (player->AtTarget())
{
player->Steering()->ArriveOff();
player->Steering()->PursuitOff();
player->TrackBall();
player->SetVelocity(Vector2D(0,0));
}
}
KickBall
Jeķli jest jedna rzecz, którą piģkarze lubią robiæ więcej niŋ upiæ się i przytulaæ, to kopanie piģki. O tak. Oni to kochają. Zwykli piģkarze nie róŋnią się. Cóŋ, myķlę, ŋe się nie upijają i nie przytulają, ale lubią kopaæ. Prosty piģkarz musi byæ w stanie kontrolowaæ i kopaæ piģkę na wiele sposobów. Musi byæ w stanie wykonaæ rzut na bramkę przeciwnika, posiadaæ umiejętnoķci niezbędne do podania piģki innemu zawodnikowi i umieæ kozģowaæ. Gdy gracz uzyska kontrolę nad piģką, powinien wybraæ najbardziej odpowiednią opcję do uŋycia w dowolnym momencie. Stan KickBall implementuje logikę rzutów i podania. Jeķli z jakiegoķ powodu gracz nie moŋe wykonaæ strzaģu lub podanie nie jest konieczne, stan gracza zostanie zmieniony na Drybling. Gracz nie moŋe pozostaæ w stanie KickBall dģuŋej niŋ jeden cykl aktualizacji; niezaleŋnie od tego, czy piģka zostanie kopnięta, czy nie, gracz zawsze zmieni stan gdzieķ w drodze przez logikę stanu. Gracz wchodzi w ten stan, jeķli piģka znajdzie się w odlegģoķci PlayerKickingDistance od swojej pozycji. Pozwól, ŋe przeprowadzę cię przez kod žródģowy:
void KickBall::Enter(FieldPlayer* player)
{
//poinformuj zespóģ, ŋe ten gracz kontroluje
player->Team()->SetControllingPlayer(player);
//gracz moŋe wykonaæ tyle prób kopnięcia na sekundę.
if (!player->isReadyForNextKick())
{
player->ChangeState(player, ChaseBall::Instance());
}
}
Metoda Enter najpierw informuje druŋynę, ŋe ten gracz jest graczem kontrolującym, a następnie sprawdza, czy gracz moŋe kopnąæ piģkę w tym kroku aktualizacji. Gracze mogą wykonywaæ kopnięcia tylko kilka razy na sekundę, z częstotliwoķcią zapisaną w zmiennej PlayerKickFrequency. Jeķli gracz nie moŋe wykonaæ próby kopnięcia, jego stan zostaje zmieniony na ChaseBall i będzie on kontynuowaģ bieg po piģce. Liczba przypadków, w których gracz moŋe kopnąæ piģkę na sekundę, jest ograniczona, aby zapobiec nieprawidģowym zachowaniom. Na przykģad, bez ograniczeņ, mogą wystąpiæ sytuacje, w których piģka zostaje kopnięta, gracz przechodzi w stan oczekiwania, a następnie, poniewaŋ piģka wciąŋ znajduje się w zasięgu kopania, uģamek sekundy póžniej gracze kopią ją ponownie. Ze względu na sposób obchodzenia się z fizyką piģki moŋe to spowodowaæ gwaģtowny, nienaturalny ruch piģki.
void KickBall::Execute(FieldPlayer* player)
{
// oblicz iloczyn iloczynu wektora wskazującego na piģkę
// i kierunek gracza
Vector2D ToBall = player->Ball()->Pos() - player->Pos();
double dot = player->Heading().Dot(Vec2DNormalize(ToBall));
// nie moŋe kopnąæ piģki, jeķli bramkarz jest w posiadaniu lub jeķli jest w posiadaniu
// za odtwarzaczem lub jeķli jest juŋ przypisany odbiornik. Więc tylko
// kontynuuj pogoņ za piģką
if (player->Team()->Receiver() != NULL ||
player->Pitch()->GoalKeeperHasBall() ||
(dot < 0) )
{
player->ChangeState(player, ChaseBall::Instance());
return;
}
Po wprowadzeniu metody wykonania oblicza się iloczyn punktowy gģowy gracza i wektora wskazującego piģkę, aby ustaliæ, czy piģka znajduje się za, czy przed graczem. Jeķli piģka jest z tyģu lub zawodnik juŋ czeka na jej odbiór, lub jeden z bramkarzy ma piģkę, stan gracza jest zmieniany, tak aby dalej go goniģ. Jeķli gracz jest w stanie kopnąæ piģkę, logika stanu okreķla, czy moŋna wykonaæ rzut do bramki. W koņcu gole są celem gry, więc naturalnie powinna byæ to pierwsza rzecz brana pod uwagę, gdy gracz uzyskuje kontrolę nad piģką.
/ * Próba strzaģu w bramkę * /
// iloczyn skalarny sģuŋy do regulacji siģy strzaģu. Więc
// piģka jest bezpoķrednio przed zawodnikiem, tym silniejsze jest kopnięcie
double power = Prm.MaxShootingForce * dot;
Zauwaŋ, ŋe siģa strzaģu jest proporcjonalna do tego, jak bezpoķrednio przed graczem znajduje się piģka. Jeķli piģka znajduje się z boku, moc, z jaką moŋna wykonaæ strzaģ, jest zmniejszona.
// jeķli strzaģ jest moŋliwy, ten wektor zachowa pozycję wzdģuŋ
// linia bramkowa przeciwnika, do której gracz powinien dąŋyæ.
// jeķli zostanie ustalone, ŋe gracz moŋe strzeliæ gola z tej pozycji
// LUB jeķli powinien po prostu kopnąæ piģkę, gracz spróbuje
// zrobiæ strzaģ
if (player->Team()->CanShoot(player->Ball()->Pos(),
power,
BallTarget) ||
(RandFloat() < Prm.ChancePlayerAttemptsPotShot))
{
Metoda CanShoot okreķla, czy istnieje potencjalny strzaģ na bramkę. W przypadku potencjalnego strzaģu CanShoot zwróci wartoķæ true i zapisze pozycję, do której gracz powinien dąŋyæ w wektorowym BallTarget. Jeķli zwróci faģsz, sprawdzamy, czy naleŋy wykonaæ "kosmetyczny" potshot (BallTarget zachowa lokalizację ostatniej pozycji uznanej za niepoprawną przez CanShoot, więc wiemy, ŋe strzaģ jest nieudany). Powodem, dla którego od czasu do czasu robi się potshot, jest oŋywienie gry, dzięki czemu ludzki obserwator wygląda o wiele bardziej ekscytująco; moŋe szybko staæ się nudny, jeķli gracze komputerowi zawsze zdobywają punkty po bramce. Od czasu do czasu losowy potshot wprowadza trochę niepewnoķci i sprawia, ŋe gra jest znacznie przyjemniejsza.
// dodaj trochę haģasu do kopnięcia. Nie chcemy graczy, którzy są
// zbyt dokģadne! Iloķæ haģasu moŋna regulowaæ poprzez zmianę
//Prm.PlayerKickingAccuracy
BallTarget = AddNoiseToKick (player-> Ball () -> Pos (), BallTarget);
// w tym kierunku zostanie kopnięta piģka
Vector2D KickDirection = BallTarget - player->Ba
Piģkę kopie się, wywoģując metodę SoccerBall :: Kick z ŋądanym nagģówkiem. Poniewaŋ idealni gracze wykonujący doskonaģe kopnięcia caģy czas nie zapewniają bardzo realistycznie wyglądającej piģki noŋnej, do kierunku kopnięcia dodawany jest haģas. Zapewnia to, ŋe gracze czasami wykonują sģabe kopnięcia.
//change state
player->ChangeState(player, Wait::Instance());
player->FindSupport();
return;
}
Po kopnięciu piģki gracz przechodzi w stan oczekiwania i prosi o pomoc innego czģonka druŋyny, wywoģując metodę PlayerBase :: FindSupport. FindSupport "prosi" zespóģ o okreķlenie partnera, który najlepiej nadaje się do zapewnienia wsparcia, oraz o wysģanie ŋądania za poķrednictwem systemu przesyģania wiadomoķci, aby czģonek zespoģu wszedģ w stan SupportAttacker. Stan następnie zwraca kontrolę nad metodą aktualizacji odtwarzacza. Jeķli nie jest moŋliwy strzaģ w bramkę, gracz rozwaŋa podanie. Gracz rozwaŋy tę opcję tylko wtedy, gdy grozi jej przeciwnik. Gracza uwaŋa się za zagroŋonego przez innego, gdy oba są w odlegģoķci mniejszej niŋ piksele PlayerComfortZone, a przeciwnik znajduje się przed pģaszczyzną gracza. Wartoķæ domyķlna jest ustawiona w pliku params.ini na 60 pikseli. Większa wartoķæ spowoduje, ŋe gracze wykonają więcej podaņ, a mniejsza wartoķæ spowoduje bardziej udane rozwiązania.
/ * Próba podania graczowi * /
// jeķli odbiorca zostanie znaleziony, wskaŋe to
PlayerBase* receiver = NULL;
power = Prm.MaxPassingForce * dot;
// sprawdž, czy są jacyķ potencjalni kandydaci dostępni do otrzymania przepustki
if (player->isThreatened() &&
player->Team()->CanPass(player,
receiver,
BallTarget,
power,
Prm.MinPassDist))
{
//dodaj trochę haģasu do kopnięcia
BallTarget = AddNoiseToKick(player->Ball()->Pos(), BallTarget);
Vector2D KickDirection = BallTarget - player->Ball()->Pos();
player->Ball()->Kick(KickDirection, power);
//powiadom odbiorcę, ŋe nadchodzi podanie
Dispatch->DispatchMsg(SEND_MSG_IMMEDIATELY,
player->ID(),
receiver->ID(),
Msg_ReceiveBall,
NO_SCOPE,
&BallTarget);
Metoda FindPass sprawdza wszystkich przyjaznych graczy, aby znaležæ czģonka druŋyny znajdującego się najdalej na boisku, w pozycji, w której moŋna wykonaæ podanie bez przechwycenia. Jeķli zostanie znalezione prawidģowe podanie, zostanie wykonane kopnięcie (z dodatkowym haģasem, jak poprzednio), a odbiorca zostanie powiadomiony, wysyģając wiadomoķæ o zmianie stanu na ReceiveBall.
// gracz powinien czekaæ na swojej aktualnej pozycji, chyba ŋe otrzyma takie polecenie
//Inaczej
player->ChangeState(player, Wait::Instance());
player->FindSupport();
return;
}
Jeķli logika gry pģynie do tego punktu, nie znaleziono ani odpowiedniego podania, ani próby bramkowej. Gracz nadal ma piģkę, więc przechodzi ona w stan Dryblowania. (Warto zauwaŋyæ, ŋe nie jest to jedyny czas, który upģywa - czģonkowie druŋyny mogą prosiæ o podanie od graczy, wysyģając im odpowiednią wiadomoķæ).
// nie moŋe strzelaæ ani podawaæ, więc kozģuj piģkę w górę
else
{
player->FindSupport();
player->ChangeState(player, Dribble::Instance());
}
}
Dryblowanie
Drybling jest czymķ, z czym dzieci ķwietnie sobie radzą, z obu stron
ale sģowo to zostaģo równieŋ przyjęte w grze w piģkę noŋną, aby opisaæ sztukę poruszania piģką wzdģuŋ boiska w serii maģych kopnięæ i kresek. Korzystając z tej umiejętnoķci, gracz moŋe obracaæ się w miejscu lub poruszaæ się zwinnie wokóģ przeciwnika, zachowując kontrolę nad piģką. Poniewaŋ jednym z æwiczeņ na koņcu będzie próba ulepszenia tej umiejętnoķci, wdroŋyģem tylko prostą metodę dryblingu, dającą graczowi wystarczającą moŋliwoķæ poruszania się grą w rozsądnym tempie. Metoda Enter po prostu informuje resztę zespoģu, ŋe zakģada się, ŋe zawodnik dryblujący ma kontrolę nad piģką.
void Dribble::Enter(FieldPlayer* player)
{
//let the team know this player is controlling
player->Team()->SetControllingPlayer(player);
}
Metoda wykonania zawiera większoķæ logiki AI. Najpierw sprawdza się, czy piģka znajduje się pomiędzy zawodnikiem a jego bramką gospodarza (boisko gracza). Ta sytuacja jest niepoŋądana, poniewaŋ gracz chce przesunąæ piģkę tak daleko, jak to moŋliwe. Dlatego gracz musi się odwróciæ, zachowując kontrolę nad piģką. Aby to osiągnąæ, gracze wykonują serię bardzo maģych kopnięæ w kierunku (45 stopni) od kierunku zwróconego w ich stronę. Po kaŋdym maģym kopnięciu gracz zmienia stan na ChaseBall. Jeķli zostanie to zrobione kilka razy w krótkich odstępach czasu, spowoduje to obrócenie gracza i piģki, dopóki nie zmierzą we wģaķciwym kierunku (w kierunku bramki przeciwnika). Jeķli piģka zostanie ustawiona nad polem gracza, gracz popchnie ją na krótką odlegģoķæ do przodu, a następnie zmieni stan na ChaseBall, aby podąŋaæ za nią.
void Dribble::Execute(FieldPlayer* player)
{
double dot = player->Team()->HomeGoal()->Facing().Dot(player->Heading());
// jeķli piģka jest pomiędzy zawodnikiem a bramką gospodarzy, musi się obróciæ
// wykonując piģkę, wykonując wiele maģych kopnięæ i obrotów, aŋ gracz
// jest skierowany we wģaķciwym kierunku
if (dot < 0)
{
// nagģówek gracza zostanie obrócony o niewielką iloķæ (Pi / 4)
// a następnie piģka zostanie kopnięta w tym kierunku
Vector2D direction = player->Heading();
// oblicz znak (+/-) kąta między kursem gracza a
// skierowany w kierunku bramki, aby gracz obracaģ się w
// poprawny kierunek
double angle = QuarterPi * -1 *
player->Team()->HomeGoal()->Facing().Sign(player->Heading());
Vec2DRotateAroundOrigin(direction, angle);
// ta wartoķæ dziaģa dobrze, gdy gracz próbuje kontrolowaæ
// piģka i obrót w tym samym czasie
const double KickingForce = 0.8;
player->Ball()->Kick(direction, KickingForce);
}
// kopnij piģkę w dóģ pola
else
{
player->Ball()->Kick(player->Team()->HomeGoal()->Facing(),
Prm.MaxDribbleForce);
}
// gracz kopnąģ piģkę, więc musi teraz zmieniæ stan, aby podąŋaæ za nią
player->ChangeState(player, ChaseBall::Instance());
return;
}
SupportAttacker
Gdy gracz uzyskuje kontrolę nad piģką, natychmiast prosi o wsparcie, wywoģując metodę PlayerBase :: FindSupport. FindSupport bada kaŋdego czģonka zespoģu po kolei, aby ustaliæ, który gracz jest najbliŋej najlepszego miejsca wsparcia (obliczanego co kilka kroków przez SupportSpot-Kalkulator) i wiadomoķci, które gracz zmienia stan na SupportAttacker. Po wejķciu w ten stan zachowanie gracza przy wģączaniu jest wģączane, a jego cel sterujący ustawiony jest na lokalizację BSS.
void SupportAttacker::Enter(FieldPlayer* player)
{
player->Steering()->ArriveOn();
player->Steering()->SetTarget(player->Team()->GetSupportSpot());
}
Istnieje szereg warunków, które skģadają się na logikę metody Execute. Przejdžmy je.
void SupportAttacker::Execute(FieldPlayer* player)
{
// jeķli jego druŋyna straci kontrolę, wróæ do domu
if (!player->Team()->InControl())
{
player->ChangeState(player, ReturnToHomeRegion::Instance()); return;
}
Jeķli druŋyna gracza straci kontrolę, gracz powinien zmieniæ stan, aby wróciæ do pozycji wyjķciowej.
// jeķli zmienia się najlepszy punkt wspierający, zmieņ cel kierowania
if (player->Team()->GetSupportSpot() != player->Steering()->Target())
{
player->Steering()->SetTarget(player->Team()->GetSupportSpot());
player->Steering()->ArriveOn();
}
Jak widzieliķcie, pozycja najlepszego miejsca wspierającego zmienia się zgodnie z wieloma czynnikami, więc kaŋdy gracz wspierający musi zawsze upewniæ się, ŋe jego cel sterowania jest aktualizowany o najnowszą pozycję.
// jeķli ten gracz strzela w bramkę ORAZ atakujący moŋe przekazaæ
// piģkę do atakującego powinien podaæ piģkę temu graczowi
if( player->Team()->CanShoot(player->Pos(),
Prm.MaxShootingForce) )
{
player->Team()->RequestPass(player);
}
Zawodnik wspierający spędza większoķæ czasu na poģowie boiska przeciwnika. Dlatego zawsze naleŋy zwracaæ uwagę na moŋliwoķæ strzaģu w bramkę przeciwnika. Te kilka linii uŋywa metody SoccerTeam :: Can-Shoot, aby ustaliæ, czy istnieje potencjalny rzut do bramki. Jeķli wynik jest pozytywny, gracz prosi o podanie przez zawodnika kontrolującego piģkę. Z kolei jeķli RequestPass ustali, ŋe podanie od gracza kontrolującego do tego gracza jest moŋliwe bez przechwycenia, zostanie wysģana wiadomoķæ Msg_ReceiveBall, a gracz odpowiednio zmieni stan w gotowoķci do otrzymania piģki.
// jeķli ten gracz znajduje się w miejscu wsparcia, a jego druŋyna nadal go ma
// posiadanie, powinien pozostaæ nieruchomy i odwróciæ się twarzą do piģki
if (player->AtTarget())
{
player->Steering()->ArriveOff();
//gracz powinien patrzeæ na piģkę!
player->TrackBall();
player->SetVelocity(Vector2D(0,0));
// jeķli nie jest zagroŋony przez innego gracza, poproķ o podanie
if (!player->isThreatened())
{
player->Team()->RequestPass(player);
}
}
}
Wreszcie, jeķli zawodnik wspierający osiągnie pozycję BSS, czeka i upewnia się, ŋe zawsze stoi twarzą do piģki. Jeķli w jego bezpoķrednim sąsiedztwie nie ma ŋadnych przeciwników i nie czuje się zagroŋony, prosi gracza o podanie.
UWAGA Naleŋy pamiętaæ, ŋe ŋądanie przepustki nie oznacza, ŋe przepustka zostanie wykonana. Podanie zostanie wykonane tylko wtedy, gdy zostanie uznane za bezpieczne przed przechwyceniem.
Bramkarze
Zadaniem bramkarza jest powstrzymanie piģki przed przesunięciem się nad linią bramkową. Aby to zrobiæ, bramkarz wykorzystuje inny zestaw umiejętnoķci niŋ zawodnik z pola i dlatego jest wdraŋany jako osobna klasa, GoalKeeper. Bramkarz przesunie się do tyģu i do przodu wzdģuŋ bramki, aŋ piģka znajdzie się w okreķlonym zakresie, w którym to momencie przesunie się na zewnątrz w kierunku piģki, próbując ją przechwyciæ. Jeķli bramkarz wejdzie w posiadanie piģki, ponownie wrzuca piģkę do gry, kopiąc ją do odpowiedniego czģonka druŋyny. Bramkarz Simple Soccer jest przypisany do regionu, który pokrywa się z celem jego druŋyny. Dlatego czerwony bramkarz jest przypisany do regionu 16, a niebieski bramkarz do regionu 1.
Ruch bramkarza
Oprócz posiadania zupeģnie innego zestawu stanów niŋ zawodnik terenowy, klasa GoalKeeper musi zastosowaæ nieco inny ukģad dla swojego ruchu. Jeķli zobaczysz bramkarza grającego w piģkę noŋną, zauwaŋysz, ŋe prawie zawsze patrzy bezpoķrednio na piģkę i ŋe wiele jego ruchów odbywa się z boku na bok, a nie wzdģuŋ jego kierunku jak zawodnik na boisku. Poniewaŋ istota uŋywająca zachowaņ kierowniczych ma kurs z wyrównaną prędkoķcią, bramkarz wykorzystuje inny wektor, m_vLookAt, aby wskazaæ kierunek, w którym jest skierowany, i ten wektor jest przekazywany do funkcji Render w celu przeksztaģcenia wierzchoģków bramkarza. Rezultatem koņcowym jest istota, która wydaje się byæ zawsze zwrócona w kierunku piģki i moŋe poruszaæ się na boki z boku na bok, a takŋe wzdģuŋ swojej osi kursu.
 Stany bramkarza
Stany bramkarza
Bramkarz wykorzystuje pięæ stanów. To są:
• GlobalKeeperState
• TendGoal
• Powrót do domu
• PutBallBackInPlay
• InterceptBall
Rzuæmy okiem na kaŋdy z nich szczegóģowo, aby zobaczyæ, co powoduje, ŋe bramkarz drga.
GlobalKeeperState
Podobnie jak stan globalny FieldPlayer, stan globalny GoalKeeper jest uŋywany jako router dla wszystkich wiadomoķci, które moŋe otrzymywaæ. Bramkarz nasģuchuje tylko dwóch wiadomoķci: Msg_GoHome i Msg_ReceiveBall. Myķlę, ŋe kod moŋe tutaj mówiæ sam za siebie:
bool GlobalKeeperState::OnMessage(GoalKeeper* keeper, const Telegram& telegram)
{
switch(telegram.Msg)
{
case Msg_GoHome:
{
keeper->SetDefaultHomeRegion();
keeper->ChangeState(keeper, ReturnHome::Instance());
}
break;
case Msg_ReceiveBall:
{
keeper->ChangeState(keeper, InterceptBall::Instance());
}
break;
}//end switch
return false;
}
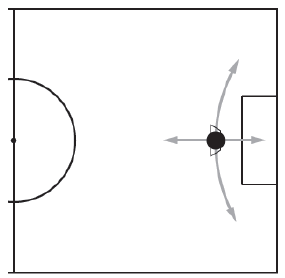
TendGoal
W stanie TendGoal bramkarz przesunie się w poprzek przodu bramki, próbując utrzymaæ swoje ciaģo pomiędzy piģką a pozycją ruchu znajdującą się z tyģu, gdzieķ wzdģuŋ linii bramkowej. Oto metoda Enter stanu:
void TendGoal::Enter(GoalKeeper* keeper)
{
//wģącz interpose
keeper->Steering()->InterposeOn(Prm.GoalKeeperTendingDistance);
// interpose ustawia agenta między pozycją piģki a celem
// pozycja usytuowana wzdģuŋ ujķcia bramki. To wywoģanie okreķla cel
keeper->Steering()->SetTarget(keeper->GetRearInterposeTarget());
}
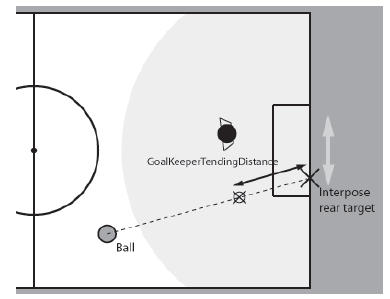
Po pierwsze, aktywowane jest zachowanie kierowania poķredniego. Interpose zwróci siģę kierującą, która próbuje ustawiæ bramkarza między piģką a pozycją usytuowaną wzdģuŋ ujķcia bramki. Pozycja ta jest okreķlana przez metodę GoalKeeper :: GetRearInterposeTarget, która przypisuje pozycję do celu proporcjonalnie tak daleko, jak dģugoķæ ujķcia bramki, gdy piģka jest ustawiona na szerokoķæ boiska. (Mam nadzieję, ŋe to zdanie miaģo sens, poniewaŋ męczyģem się nim przez dziesięæ minut i jest to najlepsze, co mogģem zrobiæ!) Mam nadzieję, ŋe poniŋszy rysunek pomoŋe ci zrozumieæ. Z punktu widzenia bramkarza im dalej piģka jest w lewo, tym dalej w lewo wzdģuŋ linii bramkowej znajduje się cel celujący. Gdy piģka przesuwa się w prawą bramkę bramkarza, celowany w ten sposób tylny cel przesuwa się wraz z nią na prawo od bramki.
Czarna podwójna strzaģka wskazuje dystans bramkarza który próbuje utrzymaæ się między sobą a tyģem sieci. Ta wartoķæ jest ustawiona w params.ini jako GoalKeeperTendingDistance. Przejdžmy do metody Execute.
void TendGoal::Execute(GoalKeeper* keeper)
{
// tylny cel poķredni zmieni się wraz ze zmianą pozycji piģki
// więc musi byæ aktualizowany na kaŋdym etapie aktualizacji
keeper->Steering()->SetTarget(keeper->GetRearInterposeTarget());
// jeķli piģka znajdzie się w zasięgu, bramkarz ją ģapie, a następnie zmienia stan
// przywrócenie piģki do gry
if (keeper->BallWithinPlayerRange())
{
keeper->Ball()->Trap();
keeper->Pitch()->SetGoalKeeperHasBall(true);
keeper->ChangeState(keeper, PutBallBackInPlay::Instance());
return;
}
// jeķli piģka znajduje się w okreķlonej odlegģoķci, bramkarz rusza się z
// pozycja, aby spróbowaæ go przechwyciæ
if (keeper->BallWithinRangeForIntercept())
{
keeper->ChangeState(keeper, InterceptBall::Instance());
}
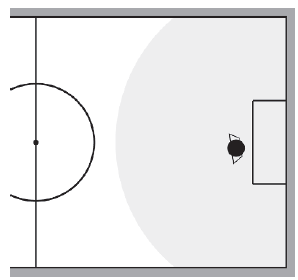
Najpierw sprawdza się, czy piģka jest wystarczająco blisko, aby bramkarz mógģ ją zģapaæ. Jeķli tak, piģka jest uwięziona, a bramkarz zmienia stan na PutBallBackInPlay. Następnie, jeķli piģka znajdzie się w zasięgu przechwytywania, pokazanego na powyŋszym rysunku jako obszar jasnoszarego i ustawionego w params.ini jako GoalKeeperInterceptRange, bramkarz zmienia stan na InterceptBall.
// jeķli bramkarz zaszedģ zbyt daleko od linii bramkowej i tam
// nie stanowi zagroŋenia ze strony przeciwników, powinien się do niej cofnąæ
if (keeper->TooFarFromGoalMouth() && keeper->Team()->InControl())
{
keeper->ChangeState(keeper, ReturnHome::Instance());
return;
}
}
Czasami po zmianie stanu z InterceptBall na TendGoal bramkarz moŋe znaležæ się zbyt daleko od bramki. Ostatnie kilka linii kodu sprawdza tę ewentualnoķæ i, jeķli jest to bezpieczne, zmienia stan wģaķciciela na ReturnHome. Metoda TendGoal :: Exit jest bardzo prosta; po prostu dezaktywuje zachowanie kierowania poķredniego.
void TendGoal::Exit(GoalKeeper* keeper)
{
keeper->Steering()->InterposeOff();
}
Powrót do domu
Stan ReturnHome przesuwa bramkarza z powrotem w kierunku swojego regionu ojczystego. Po osiągnięciu regionu gospodarza lub gdy przeciwnicy przejmują kontrolę nad piģką, bramkarz wraca do stanu TendGoal
void ReturnHome::Enter(GoalKeeper* keeper)
{
keeper->Steering()->ArriveOn();
}
void ReturnHome::Execute(GoalKeeper* keeper)
{
keeper->Steering()->SetTarget(keeper->HomeRegion()->Center());
// jeķli wystarczająco blisko domu lub przeciwnicy przejdą kontrolę nad piģką,
// zmieņ stan na tendencję do celu
if (keeper->InHomeRegion() || !keeper->Team()->InControl())
{
keeper->ChangeState(keeper, TendGoal::Instance());
}
}
void ReturnHome::Exit(GoalKeeper* keeper)
{
keeper->Steering()->ArriveOff();
}
PutBallBackInPlay
Gdy bramkarz zdobywa piģkę, przechodzi w stan PutBallBack-InPlay. Kilka rzeczy dzieje się w metodzie Enter tego stanu. Najpierw bramkarz informuje swoją druŋynę, ŋe ma piģkę, a następnie wszyscy gracze polowi są proszeni o powrót do swoich rodzinnych miejsc poprzez poģączenie z metodą SoccerTeam :: ReturnAllFieldPlayersToHome. Zapewnia to wystarczającą iloķæ wolnego miejsca między bramkarzem a zawodnikami, aby wykonaæ rzut od bramki.
void PutBallBackInPlay::Enter(GoalKeeper* keeper)
{
//poinformuj zespóģ, ŋe bramkarz ma kontrolę
keeper->Team()->SetControllingPlayer(keeper);
//wyķlij wszystkich graczy do domu
keeper->Team()->Opponents()->ReturnAllFieldPlayersToHome();
keeper->Team()->ReturnAllFieldPlayersToHome();
}
Bramkarz czeka teraz, aŋ wszyscy pozostali gracze odejdą daleko,wystarczająco daleko i moŋe wykonaæ czyste podanie do jednego z czģonków swojego zespoģu. Gdy tylko okazja do podania jest dostępna, bramkarz podaje piģkę, wysyģa wiadomoķæ do gracza odbierającego, aby poinformowaæ ją, ŋe piģka jest w drodze, a następnie zmienia stan, aby powróciæ do utrzymywania bramki.
void PutBallBackInPlay::Execute(GoalKeeper* keeper)
{
PlayerBase* receiver = NULL;
Vector2D BallTarget;
// sprawdž, czy na boisku są gracze dalej, moŋemy
// byæ w stanie przejķæ do. Jeķli tak, wykonaj przepustkę.
if (keeper->Team()->FindPass(keeper,
receiver,
BallTarget,
Prm.MaxPassingForce,
Prm.GoalkeeperMinPassDist))
{
//dokonaj podania
keeper->Ball()->Kick(Vec2DNormalize(BallTarget - keeper->Ball()->Pos()),
Prm.MaxPassingForce);
//bramkarz nie ma juŋ piģki
keeper->Pitch()->SetGoalKeeperHasBall(false);
//poinformuj gracza odbierającego, ŋe piģka nadchodzi do niego
Dispatcher->DispatchMsg(SEND_MSG_IMMEDIATELY,
keeper->ID(),
receiver->ID(),
Msg_ReceiveBall,
&BallTarget);
//wróæ do pielęgnowania celu
keeper->GetFSM()->ChangeState(TendGoal::Instance());
return;
}
keeper->SetVelocity(Vector2D());
}
InterceptBall
Bramkarz spróbuje przechwyciæ piģkę, jeķli przeciwnicy mają kontrolę i jeķli znajdzie się w "zasięgu zagroŋenia" - szary obszar pokazany na poniŋszym rysunku. Wykorzystuje zachowanie polegające na kierowaniu poķcigiem w celu skierowania go w kierunku piģki.
void InterceptBall::Enter(GoalKeeper* keeper)
{
keeper->Steering()->PursuitOn();
}
Gdy bramkarz porusza się na zewnątrz, w kierunku piģki, ciągle sprawdza odlegģoķæ do bramki, aby upewniæ się, ŋe nie przesunie się ona zbyt daleko. Jeķli bramkarz znajdzie się poza zakresem bramkowym, zmienia stan na ReturnHome. Jest jeden wyjątek: jeķli bramkarz jest poza zasięgiem bramkowym, ale jest najbliŋszym graczem na boisku do piģki, biegnie za nim. Jeķli piģka znajdzie się w zasięgu bramkarza, zatrzymuje piģkę przy uŋyciu metody SoccerBall :: Trap, informuje wszystkich, ŋe jest w posiadaniu, i zmienia stan, aby ponownie wprowadziæ piģkę do gry.
void InterceptBall::Execute(GoalKeeper* keeper)
{
// jeķli bramkarz oddali się zbyt daleko od bramki, powinien wróciæ do swojego
// region macierzysty, chyba ŋe jest najbliŋszym piģką, w takim przypadku
// powinien nadal próbowaæ go przechwyciæ.
if (keeper->TooFarFromGoalMouth() && !keeper->ClosestPlayerOnPitchToBall())
{
keeper->ChangeState(keeper, ReturnHome::Instance());
return;
}
// jeķli piģka znajdzie się w zasięgu rąk bramkarza, ģapie ją w puģapkę
// piģka i przywraca ją do gry
if (keeper->BallWithinPlayerRange())
{
keeper->Ball()->Trap();
keeper->Pitch()->SetGoalKeeperHasBall(true);
keeper->ChangeState(keeper, PutBallBackInPlay::Instance());
return;
}
}
Metoda wyjķcia InterceptBall wyģącza zachowanie poķcigowe.
Kluczowe metody stosowane przez AI
AI często stosuje wiele metod klasy SoccerTeam, dlatego peģny opis jest waŋny dla peģnego zrozumienia dziaģania AI. Mając to na uwadze przeprowadzę cię krok po kroku. Zaģóŋ z powrotem swój kapelusz matematyczny…
SoccerTeam :: isPassSafeFromAllOpponents
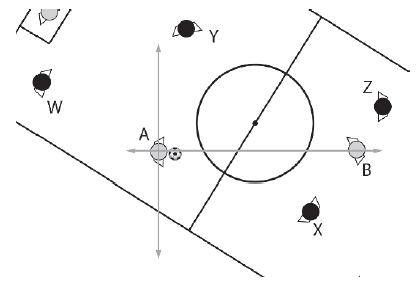
Piģkarz, bez względu na swoją rolę w grze, nieustannie ocenia swoją pozycję w stosunku do otaczających go osób i wydaje opinie na podstawie tych ocen. Jednym z obliczeņ, które AI wykonuje często, jest ustalenie, czy podanie z pozycji A do pozycji B moŋe zostaæ przechwycone przez dowolnego przeciwnika w dowolnym punkcie trajektorii piģki. Potrzebuje tych informacji, aby oceniæ, czy moŋe wykonaæ podanie, czy powinien poprosiæ o podanie od aktualnego napastnika, czy teŋ istnieje szansa na zdobycie bramki.
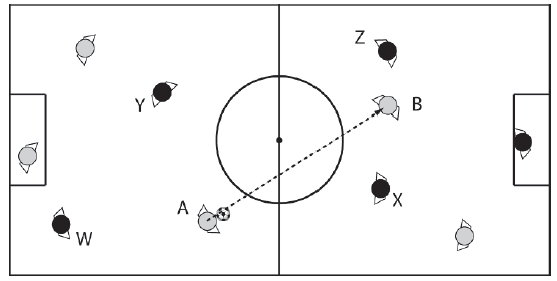
////
Zastanów się nad rysunkiem powyŋej. Gracz A chciaģby wiedzieæ, czy moŋe podaæ piģkę do gracza B bez przechwycenia go przez któregokolwiek z przeciwników W, X, Y lub Z. Aby to ustaliæ, musi rozwaŋyæ kaŋdego przeciwnika po kolei i obliczyæ, czy prawdopodobne jest przechwycenie . SoccerTeam :: isPassSafeFromOpponent to miejsce, w którym wykonywana jest caģa praca. Metoda przyjmuje jako parametry początkową i koņcową pozycję podania, wskažnik do przeciwnika, który naleŋy wziąæ pod uwagę, wskažnik do odbiornika, do którego piģka jest podawana, i siģy, z jaką piģka zostanie kopnięta. Metoda jest wywoģywana dla kaŋdego przeciwnika w druŋynie przeciwnej za pomocą metody SoccerTeam :: isPassSafeFromAllOpponents.
bool SoccerTeam::isPassSafeFromOpponent(Vector2D from,
Vector2D target,
const PlayerBase* const receiver,
const PlayerBase* const opp,
double PassingForce)const
{
//przenieķ przeciwnika w lokalną przestrzeņ.
Vector2D ToTarget = target - from;
Vector2D ToTargetNormalized = Vec2DNormalize(ToTarget);
Vector2D LocalPosOpp = PointToLocalSpace(opp->Pos(),
ToTargetNormalized,
ToTargetNormalized.Perp(),
from);
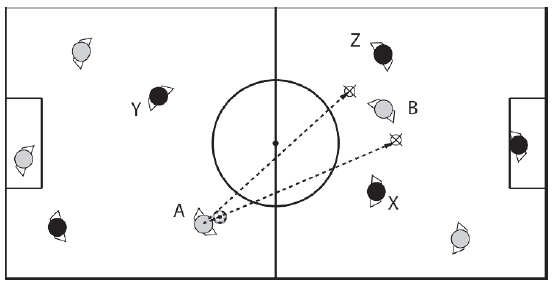
Pierwszym krokiem jest zaģoŋenie, ŋe A patrzy bezpoķrednio na pozycję "docelową" (w tym przykģadzie na pozycję gracza B) i przesunięcie przeciwnika do lokalnego ukģadu wspóģrzędnych A. Poniŋszy rysunek pokazuje, w jaki sposób wszyscy przeciwnicy na rysunku powyŋej są rozmieszczeni po przesunięciu na lokalną przestrzeņ gracza A
// jeķli przeciwnik znajduje się za kickerem, podanie uznaje się za w porządku (tak jest
// w oparciu o zaģoŋenie, ŋe piģka zostanie kopnięta za pomocą
// prędkoķæ większa niŋ prędkoķæ maksymalna przeciwnika)
if (LocalPosOpp.x <0)
{
return true;
}
Zakģada się, ŋe piģka będzie zawsze kopana z prędkoķcią początkową większą niŋ prędkoķæ maksymalna gracza. Jeķli to prawda, przeciwnicy znajdujący się za lokalną osią y kickera mogą zostaæ usunięci z dalszych rozwaŋaņ. Dlatego, biorąc pod uwagę przykģad na poniŋszym rysunku, W moŋna odrzuciæ. Następnie brani są pod uwagę wszyscy przeciwnicy znajdujący się dalej od gracza podającego niŋ cel. Jeķli sytuacja jest taka, jak pokazano na powyŋszym rysunku, a docelowa lokalizacja podania znajduje się u stóp odbiorcy, wówczas dowolnego przeciwnika znajdującego się dalej niŋ to moŋna natychmiast odrzuciæ. Jednak ta metoda jest równieŋ wywoģywana w celu przetestowania waŋnoķci potencjalnych przepustek, które znajdują się po obu stronach gracza odbierającego, takich jak te pokazane na rysunku poniŋej
W takim przypadku naleŋy wykonaæ dodatkowy test, aby sprawdziæ, czy przeciwnik znajduje się dalej od pozycji docelowej niŋ odbiornik. Jeķli tak, przeciwnik moŋe zostaæ odrzucony.
// jeķli przeciwnik znajduje się dalej niŋ cel, musimy rozwaŋyæ, czy
// przeciwnik moŋe osiągnąæ pozycję przed odbiorcą.
if (Vec2DDistanceSq(from, target) < Vec2DDistanceSq(opp->Pos(), from))
{
// ten warunek jest tutaj, poniewaŋ czasami moŋna wywoģaæ tę funkcję
// bez odniesienia do odbiornika. (Na przykģad moŋesz chcieæ znaležæ
// jeķli piģka moŋe osiągnąæ pozycję na boisku przed przeciwnikiem
// moŋna się do tego dostaæ)
if (receiver)
{
if (Vec2DDistanceSq(target, opp->Pos()) >
Vec2DDistanceSq(target, receiver->Pos()))
{
return true;
}
}
else
{
return true;
}
}
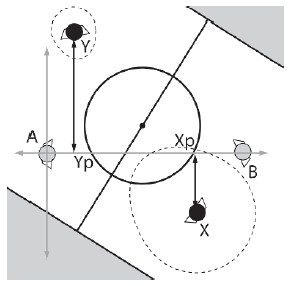
Najlepszą szansą, ŋe przeciwnik znajdujący się pomiędzy dwoma poprzednimi warunkami ma przechwycenie piģki, jest bieg do punktu, w którym trajektoria piģki jest prostopadģa do pozycji przeciwnika, pokazanej jako punkty Yp i Xp odpowiednio dla graczy Y i X na rysunku
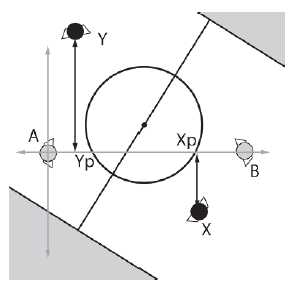
Aby przechwyciæ piģkę, przeciwnik musi byæ w stanie dotrzeæ do tego punktu, zanim piģka się tam dostanie. Aby pokazaæ, jak obliczyæ, czy jest to moŋliwe, przyjrzyjmy się przypadkowi przeciwnika Y. Po pierwsze, czas potrzebny na pokonanie piģki przez odlegģoķæ od A do Yp jest okreķlany przez wywoģanie SoccerBall :: TimeToCoverDistance. Ta metoda zostaģa szczegóģowo opisana wczeķniej, więc powinieneķ zrozumieæ, jak to dziaģa. Biorąc pod uwagę ten czas, moŋna obliczyæ, jak daleko moŋe pokonaæ przeciwnik Y, zanim piģka osiągnie punkt Yp (czas * prędkoķæ). Nazywam tę odlegģoķæ Y zasięgiem, poniewaŋ jest to odlegģoķæ, jaką Y moŋe pokonaæ w dowolnym kierunku w okreķlonym czasie. Do tego zakresu naleŋy dodaæ promieņ piģki noŋnej i promieņ okręgu ograniczającego gracza. Ta wartoķæ zasięgu reprezentuje teraz "zasięg" zawodnika, biorąc pod uwagę czas, w którym piģka osiąga Yp. Zasięg Y i X pokazano za pomocą kropkowanych kóģ na rysunku
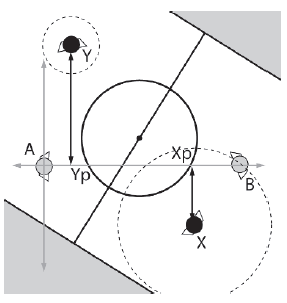
Jeķli okrąg opisany przez zasięg przeciwnika przecina oķ x, oznacza to, ŋe przeciwnik jest w stanie przechwyciæ piģkę w wyznaczonym czasie. Dlatego w tym przykģadzie moŋna stwierdziæ, ŋe przeciwnik Y nie jest zagroŋeniem, ale przeciwnikiem X jest. Oto ostatni fragment kodu do sprawdzenia.
// oblicz, ile czasu zajmuje piģce pokonanie odlegģoķci do
// pozycja prostopadģa do pozycji przeciwnika
double TimeForBall =
Pitch()->Ball()->TimeToCoverDistance(Vector2D(0,0),
Vector2D(LocalPosOpp.x, 0),
PassingForce);
// oblicz teraz, jak daleko przeciwnik moŋe uciec w tym czasie
double reach = opp->MaxSpeed() * TimeForBall +
Pitch()->Ball()->BRadius()+
opp->BRadius();
// jeķli odlegģoķæ do pozycji y przeciwnika jest mniejsza niŋ jego bieg
// zasięg plus promieņ piģki i promieņ przeciwnika, a następnie
// piģka moŋe zostaæ przechwycona
if ( fabs(LocalPosOpp.y) < reach )
{
return false;
}
return true;
}
UWAGA Technicznie rzecz biorąc, zakresy pokazane na powyŋszym rysunku są nieprawidģowe. Przyjąģem zaģoŋenie, ŋe obracanie się przeciwnika w kierunku punktu przecięcia zajmuje zero czasu. Aby byæ dokģadnym, naleŋy równieŋ wziąæ pod uwagę czas potrzebny na obrót, w którym to przypadku zakres jest opisany przez elipsę zamiast koģa. Jak tu:
Oczywiķcie obliczenie linii elipsy jest znacznie droŋsze przecięcia, dlatego zamiast tego uŋywane są koģa.
SoccerTeam :: CanShoot
Jedną z bardzo waŋnych umiejętnoķci piģkarza jest oczywiķcie umiejętnoķæ strzelania bramek. Gracz będący w posiadaniu piģki moŋe zapytaæ metodę SoccerTeam :: CanShoot, aby sprawdziæ, czy jest w stanie strzeliæ gola, biorąc pod uwagę aktualną pozycję piģki i wartoķæ reprezentującą siģę, z jaką gracz kopie piģkę. Jeķli metoda ustali, ŋe gracz jest w stanie strzelaæ, zwróci wartoķæ true i zapisze pozycję, w której gracz powinien strzelaæ, w odniesieniu do wektora ShotTarget. Metoda polega na losowym wybieraniu liczby pozycji wzdģuŋ bramki i testowaniu kaŋdej z nich po kolei, aby sprawdziæ, czy piģkę moŋna kopnąæ do tego punktu bez przechwycenia przez któregokolwiek z przeciwników. Zobacz rysunek poniŋej
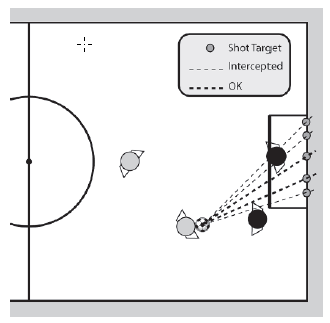 Oto lista kodów. (Zwróæ uwagę na sposób sprawdzania, czy siģa kopnięcia jest wystarczająca do przesunięcia piģki nad linią bramkową.
Oto lista kodów. (Zwróæ uwagę na sposób sprawdzania, czy siģa kopnięcia jest wystarczająca do przesunięcia piģki nad linią bramkową.
bool SoccerTeam::CanShoot(Vector2D BallPos,
double power
Vector2D& ShotTarget)const
{
//liczba losowo utworzonych celów strzaģu, które ta metoda przetestuje
int NumAttempts = Prm.NumAttemptsToFindValidStrike;
while (NumAttempts--)
{
//wybierz losową pozycję wzdģuŋ bramki przeciwnika. (zrobienie
// upewnij się, ŋe promieņ piģki jest brany pod uwagę)
ShotTarget = OpponentsGoal()->Center();
// wartoķæ y pozycji strzaģu powinna leŋeæ gdzieķ pomiędzy nimi
// sģupki bramkowe (biorąc pod uwagę ķrednicę piģki)
int MinYVal = OpponentsGoal()->LeftPost().x + Pitch()->Ball()->BRadius();
int MaxYVal = OpponentsGoal()->RightPost().x - Pitch()->Ball()->BRadius();
ShotTarget.x = RandInt(MinYVal, MaxYVal);
// upewnij się, ŋe uderzenie piģki o podanej mocy wystarcza do jazdy
// piģka nad linią bramkową.
double time = Pitch()->Ball()->TimeToCoverDistance(BallPos,
ShotTarget,
power);
// jeķli tak, ten strzaģ jest następnie testowany, aby sprawdziæ, czy któryķ z przeciwników
// moŋe to przechwyciæ.
{
if (isPassSafeFromAllOpponents(BallPos, ShotTarget, NULL, power))
{
return true;
}
}
}
return false;
}
SoccerTeam :: FindPass
Metoda FindPass jest wywoģywana przez gracza w celu ustalenia, czy podanie do czģonka druŋyny jest moŋliwe, a jeķli tak, to do której pozycji i czģonka druŋyny najlepiej podaæ piģkę. Metoda przyjmuje jako parametry wskažnik do gracza ŋądającego podania; odniesienie do wskažnika, który będzie wskazywaģ na odbierającego gracza (jeķli znaleziono przepustkę); odniesienie do wektora PassTarget, do którego zostanie przypisana pozycja, w której zostanie wykonane przejķcie; siģa, z jaką piģka zostanie kopnięta; oraz wartoķæ reprezentującą minimalną odlegģoķæ, jaką powinien znajdowaæ się odbiorca od gracza podającego, MinPassingDistance. Następnie metoda iteruje wszystkich czģonków zespoģu przechodzących i wywoģuje GetBestPassToReceiver dla kaŋdego z tych, którzy są przynajmniej MinPassing - Odlegģoķæ od przechodnia. GetBestPassToReceiver sprawdza liczbę potencjalnych lokalizacji mijania dla rozwaŋanego czģonka druŋyny, a jeķli pass moŋna bezpiecznie wykonaæ, przechowuje najlepszą okazję w wektorze BallTarget. Po rozpatrzeniu wszystkich czģonków druŋyny, jeķli znaleziono prawidģową przepustkę, ta, która jest najbliŋsza linii bazowej przeciwnika, jest przypisywana do PassTarget, a wskažnik do gracza, który powinien otrzymaæ przepustkę, jest przypisywany do odbiorcy. Następnie metoda zwraca true. Oto listing do sprawdzenia.
bool SoccerTeam::FindPass(const PlayerBase*const passer,
PlayerBase*& receiver,
Vector2D& PassTarget,
double power,
double MinPassingDistance)const
{
std::vector
double ClosestToGoalSoFar = MaxDouble;
Vector2D BallTarget;
//iteruj przez wszystkich czģonków zespoģu tego gracza i oblicz, które
// jeden jest w stanie podaæ piģkę
for (curPlyr; curPlyr != Members().end(); ++curPlyr)
{
// upewnij się, ŋe potencjalny odbiorca, który jest badany, nie jest tym graczem
// i ŋe jest dalej niŋ minimalna odlegģoķæ przejķcia
if ( (*curPlyr != passer) &&
(Vec2DDistanceSq(passer->Pos(), (*curPlyr)->Pos()) >
MinPassingDistance*MinPassingDistance))
{
if (GetBestPassToReceiver(passer, *curPlyr, BallTarget, power))
{
// jeķli cel podania jest najbliŋszy znalezionej linii bramkowej przeciwnika
// do tej pory prowadž rejestr
double Dist2Goal = fabs(BallTarget.x - OpponentsGoal()->Center().x);
if (Dist2Goal < ClosestToGoalSoFar)
{
ClosestToGoalSoFar = Dist2Goal;
//prowadž rejestr tego odtwarzacza
receiver = *curPlyr;
//i cel
PassTarget = BallTarget;
}
}
}
}//następny czģonek zespoģu
if (receiver) return true;
else return false;
}
SoccerTeam :: GetBestPassToReceiver>
Biorąc pod uwagę przechodnia i odbiorcę, ta metoda sprawdza kilka róŋnych pozycji wokóģ odbiornika, aby sprawdziæ, czy moŋna bezpiecznie przejķæ do któregoķ z nich. Jeķli moŋna dokonaæ podania, metoda przechowuje najlepsze podanie - to do pozycji najbliŋszej linii bazowej przeciwnika - w parametrze PassTarget i zwraca true. Pozwól, ŋe omówię algorytm, korzystając z sytuacji pokazanej na poniŋszym rysunku
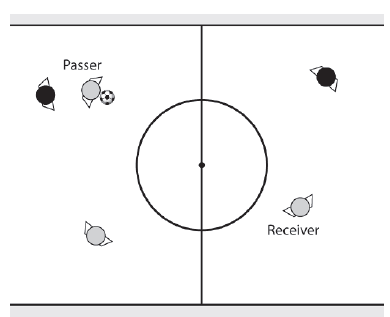
bool SoccerTeam::GetBestPassToReceiver(const PlayerBase* const passer,
const PlayerBase* const receiver,
Vector2D& PassTarget,
double power)const
{
Przede wszystkim metoda oblicza, ile czasu zajmie kulka, aby osiągnąæ pozycję odbierającego, i natychmiast zwraca wartoķæ false, jeķli nie moŋna osiągnąæ tego punktu z uwagi na siģę kopnięcia, moc.
// najpierw obliczyæ, ile czasu zajmie dotarcie piģki
// ten odbiornik
double time = Pitch()->Ball()->TimeToCoverDistance(Pitch()->Ball()->Pos(),
receiver->Pos(),
power);
// zwraca faģsz, jeķli piģka nie moŋe dosięgnąæ odbierającego po jej zakoņczeniu
// wyrzucony z podaną mocą
if (time <= 0) return false;
Moŋna teraz obliczyæ, jak daleko odbiornik moŋe się poruszaæ w tym czasie, korzystając z równania x = v t. Punkty przecięcia stycznych od piģki do tego okręgu zasięgu reprezentują granice obwiedni podania zawodnika. Zobacz rysunek
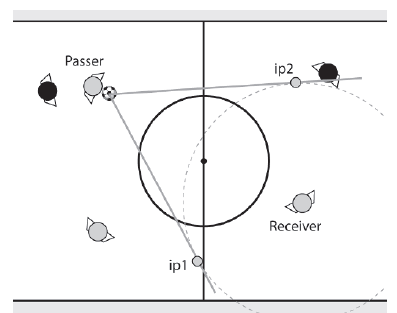
// maksymalna odlegģoķæ, jaką odbiornik moŋe pokonaæ w tym czasie
double InterceptRange = time * receiver->MaxSpeed();
Innymi sģowy, zakģadając, ŋe nie marnuje czasu na obracanie się lub przyspieszanie do maksymalnej prędkoķci, odbiornik moŋe osiągnąæ pozycje ip1 lub ip2 w samą porę, aby przechwyciæ piģkę. Jednak w rzeczywistoķci odlegģoķæ ta jest często zbyt duŋa, zwģaszcza jeķli odlegģoķæ między odbiornikiem a przechodzącym dochodzi do granic, w których moŋna wykonaæ podanie (często ip1 i ip2 ostatecznie znajdą się poza obszarem gry). O wiele lepiej jest rozwaŋyæ podanie do pozycji dobrze leŋących w tym regionie. Zmniejszy to szansę na przechwycenie piģki przez przeciwników, a takŋe sprawi, ŋe podanie będzie mniej podatne na nieprzewidziane trudnoķci (takie jak odbieranie przez manewr wokóģ przeciwników, aby osiągnąæ cel podania). Daje równieŋ odbiornikowi "przestrzeņ", przez co moŋe osiągnąæ pozycję, a następnie odpowiednio ustawiæ się w odpowiednim czasie, aby otrzymaæ przepustkę. Mając to na uwadze, zakres przechwytywania jest zmniejszany do okoģo jednej trzeciej jego pierwotnego rozmiaru.
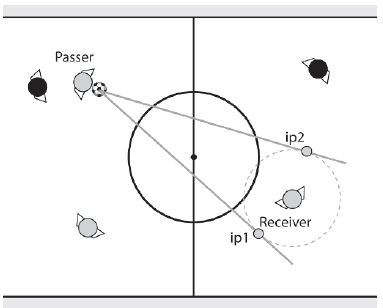
// Zmniejsz zakres przechwytywania
const double ScalingFactor = 0.3;
InterceptRange *= ScalingFactor;
Jak widaæ, wygląda to o wiele bardziej rozsądnie i bardziej przypomina rodzaj zasięgu, który wziąģby pod uwagę ludzki piģkarz. Następnym krokiem jest obliczenie pozycji ip1 i ip2. Zostaną one uznane za potencjalne cele przechodzące. Ponadto metoda uwzględni równieŋ przejķcie bezpoķrednio do bieŋącej lokalizacji odbiornika. Te trzy pozycje są przechowywane w tablicach Pasy.
// obliczyæ cele podania, które znajdują się na przechwyceniach
// stycznych od piģki do koģa zasięgu odbierającego.
Vector2D ip1, ip2;
GetTangentPoints(receiver->Pos(),
InterceptRange,
Pitch()->Ball()->Pos(),
ip1,
ip2);
const int NumPassesToTry = 3;
Vector2D Passes[NumPassesToTry] = {ip1, receiver->Pos(), ip2};
Wreszcie, metoda iteruje przez kaŋde potencjalne podanie, aby upewniæ się, ŋe pozycja znajduje się w obszarze gry i aby byģa bezpieczna przed próbą przechwycenia przez przeciwników. Pętla zapisuje najlepsze prawidģowe sprawdzenie, które sprawdza, i odpowiednio zwraca wynik.
// to przekazanie jest najlepiej dostępna do tej pory, jeķli:
//
// 1. Dalej w górę pola niŋ najbliŋszy waŋny przepust dla tego odbiornika
// znaleziono do tej pory
// 2. W obszarze gry
// 3. Nie moŋe zostaæ przechwycony przez ŋadnego przeciwnika
double ClosestSoFar = MaxDouble;
bool bResult = false;
for (int pass=0; pass
double dist = fabs(Passes[pass].x - OpponentsGoal()->Center().x);
if (( dist < ClosestSoFar) &&
Pitch()->PlayingArea()->Inside(Passes[pass]) &&
isPassSafeFromAllOpponents(Pitch()->Ball()->Pos(),
Passes[pass],
receiver,
power))
{
ClosestSoFar = dist;
PassTarget = Passes[pass];
bResult = true;
}
}
return bResult;
}
Dokonywanie szacunków i zaģoŋeņ dla Ciebie
Prawdopodobnie zauwaŋyģeķ, ŋe wykorzystaģem wiele szacunków i zaģoŋeņ podczas obliczeņ opisanych tu. Na początku moŋe się to wydawaæ zģe, poniewaŋ jako programiķci jesteķmy przyzwyczajeni do upewnienia się, ŋe wszystko dziaģa "tak", jak idealne automaty zegarowe. Czasami jednak korzystne jest zaprojektowanie sztucznej inteligencji gry w taki sposób, aby powodowaģa sporadyczne bģędy. Jest to dobra rzecz, jeķli chodzi o tworzenie gier komputerowych AI. Dlaczego? Poniewaŋ jest bardziej realistyczny. Ludzie caģy czas popeģniają bģędy i wyciągają bģędne sądy, dlatego teŋ sporadyczny bģąd popeģniony przez sztuczną inteligencję sprawia, ŋe doķwiadczenie gracza jest znacznie bardziej zabawne. Istnieją dwa sposoby wywoģywania bģędów. Pierwszym z nich jest uczynienie AI "idealną" i stępienie jej. Drugim jest umoŋliwienie wkradania się "bģędów" poprzez dokonywanie zaģoŋeņ lub szacunków podczas projektowania algorytmów wykorzystywanych przez AI. Widziaģeķ obie te metody stosowane w Simple Soccer. Przykģadem tego pierwszego jest uŋycie losowego haģasu do wprowadzenia niewielkiej iloķci bģędu w kierunku za kaŋdym razem, gdy piģka jest kopana. Przykģadem tego ostatniego jest uŋycie kóģ zamiast elips do opisu zakres przechwytywania przeciwnika. Podejmując decyzję o tworzeniu bģędów i niepewnoķci w sztucznej inteligencji, naleŋy dokģadnie zbadaæ kaŋdy odpowiedni algorytm. Moja rada jest następująca: jeķli algorytm jest ģatwy do kodowania i nie wymaga duŋo czasu procesora, zrób to w "poprawny" sposób, uczyņ go doskonaģym i gģupim. W przeciwnym razie sprawdž, czy moŋliwe jest dokonanie jakichkolwiek zaģoŋeņ lub szacunków, które pomogą zmniejszyæ zģoŋonoķæ algorytmu. Jeķli twój algorytm moŋna uproķciæ w ten sposób, koduj go, a następnie dokģadnie go przetestuj, aby upewniæ się, ŋe AI dziaģa zadowalająco.
Podsumowanie
Simple Soccer pokazuje, w jaki sposób moŋna stworzyæ druŋynową sztuczną inteligencję dla gry sportowej, uŋywając tylko kilku podstawowych technik sztucznej inteligencji. Oczywiķcie na obecnym etapie zachowanie nie jest ani szczególnie wyrafinowane, ani kompletne. Wraz ze wzrostem wiedzy na temat technik sztucznej inteligencji i doķwiadczenia zobaczysz wiele obszarów, w których moŋna ulepszyæ lub uzupeģniæ projektowanie gry Simple Soccer. Na początek warto spróbowaæ swoich siģ w niektórych z poniŋszych æwiczeņ.
Praktyka czyni mistrza
Poniŋsze æwiczenia zostaģy opracowane w celu wzmocnienia kaŋdej z róŋnych umiejętnoķci, których nauczyģeķ się do tej pory. Mam nadzieję, ŋe dobrze się z nimi zabawisz.
1. Na obecnym etapie zachowanie dryblingu jest sģabe: jeķli zawodnik wspierający nie moŋe wystarczająco szybko przenieķæ się na odpowiednią pozycję, atakujący z przyjemnoķcią rzuci piģkę w linii prostej bezpoķrednio w ręce bramkarza druŋyny przeciwnej (lub z tyģu ķciana, w zaleŋnoķci od tego, co nastąpi wczeķniej). Popraw to zachowanie, dodając logikę, aby atakujący nie posunąģ się zbyt daleko przed graczem wspierającym. Znalazģeķ to ģatwe? Jakie są inne sposoby poprawy zachowania atakującego? Czy potrafisz tworzyæ zawodników, którzy mogą dryblowaæ piģkę wokóģ przeciwników?
2. Poza zmianą regionów przebywania w przykģadowym kodzie nie ma ŋadnej gry obronnej. Twórz graczy, którzy potrafią wmieszaæ się między atakujących i wspierających graczy.
3. Dostosuj kalkulator punktu wsparcia, aby wypróbowaæ róŋne schematy punktacji. Tutaj moŋesz eksperymentowaæ z wieloma opcjami. Na przykģad, moŋesz oceniæ pozycję pod względem jakoķci bycia w równej odlegģoķci od wszystkich przeciwników lub jakoķci wyprzedzania pozycji gracza kontrolującego. Moŋesz nawet zmieniaæ schemat oceniania w zaleŋnoķci od tego, gdzie znajdują się kontrolujący i wspierający gracze.
4. Utwórz dodatkowe stany na poziomie zespoģu, aby zastosowaæ bardziej zróŋnicowane taktyki. Oprócz przypisywania graczom róŋnych regionów macierzystych, stwórz stany, które przypisują role takŋe niektórym graczom. Jedną z taktyk moŋe byæ obalenie atakującego gracza druŋyny przeciwnej poprzez przydzielenie graczy do otoczenia. Innym moŋe byæ nakazanie niektórym graczom pozostania blisko - aby "zaznaczyæ" w terminologii piģkarskiej - blokowanie przeciwników AI postrzega to jako zagroŋenie (na przykģad takie, które znajduje się w pobliŋu bramki gospodarzy).
5. Zmieņ program, aby przechodzący gracz kopaģ piģkę za pomocą potrzebnej odpowiedniej siģy, aby dotarģ do stóp odbiornika z wybraną przez Ciebie prędkoķcią.
6. Przedstaw ideę wytrzymaģoķci. Wszyscy gracze zaczynają z taką samą wytrzymaģoķcią, a biegając po polu, zuŋywają ją. Im mniejszą mają wytrzymaģoķæ, tym wolniej biegają i tym mniej mocniej mogą strzelaæ. Mogą odzyskaæ wytrzymaģoķæ tylko wtedy, gdy są nieruchomi.
7. Wdroŋenie sędziego. To nie jest tak proste, jak się wydaje. Sędzia musi zawsze staraæ się ustawiæ w miejscu, w którym widzi piģkę i zawodników, bez ingerencji w akcję.